Изобретение относится к авиационному приборостроению, в частности к средствам информационного обеспечения захода летательных аппаратов (ЛА) на посадку на аэродромы с неизвестными координатами и параметрами взлетно-посадочной полосы (ВПП).
Известны датчики полярных координат ориентиров (ДПКО) с лазерным дальномерным каналом и пультом управления (ПУ), измеряющие дальность Dо, и угол визирования ориентира ϕo [1]
Известен спутниковый (инерциально-спутниковый) датчик координат, измеряющий географические координаты местоположения ЛА [2]
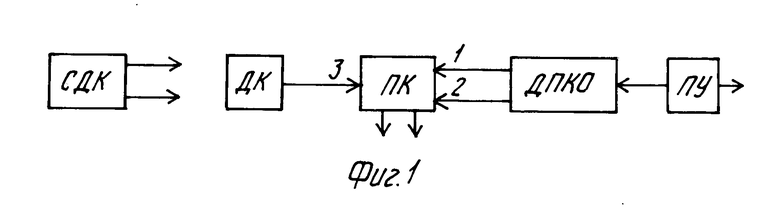
Наиболее близкой к предлагаемой является комплексная система, содержащая спутниковый датчик географических координат (СДК), датчик полярных координат ориентира (ДПКО) с пультом управления (ПУ), датчик курса (ДК) и преобразователь координат (ПК) [3]
СДК формирует и выдает географические координаты местоположения ЛА
Хcи Хс + Δ1, Zси Zс + Δ2, где Xc, Zc действительные координаты местоположения;
Δ1 Δ2 систематические погрешности.
ДПКО формирует и выдает относительные (относительно ориентира) полярные координаты: дальность Dи Dо ≈ D и угол визирования ориентира ϕи ϕo + Δ ϕ (в современных ДПКО с лазерным каналом измерения дальности погрешность ΔD ≈ 0, Δ ϕ- систематическая погрешность измерения угла визирования), в ПК формируются относительные географические координаты (относительно ориентира A)
Zсаи Dсos αи, Хсаи D sin αи где αи 180о (ϕи + Ψи) 180о (ϕ + Ψ )- Δ ϕ Δ Ψ α Δ
Δ Δ ϕ + Δ Ψ
Δ Ψ систематическая погрешность по углу курса, тогда Zсаи Dсos α cos Δ + D sinα sin Δ Xca sin Δ + Zca cosΔ
Хсаи D sinα cos Δ D cos α sin Δ Xca cos Δ Zca sin Δ где Хса, Zса действительные относительные координаты ЛА относительно ориентира A.
При неизвестных координатах точки A заход на посадку по информации CДК вообще невозможен, а, например, при Δ= 0,5о Хса Zса 2000 м, δ Хса δ Zса 200 м, наличие этих погрешностей является недостатком систем прототипа. Технико-экономическим эффектом, достигаемым при использовании предлагаемого изобретения, является повышение точности информационного обеспечения захода на посадку.
Это достигается тем, что в комплексную систему навигационного обеспечения захода на посадку, содержащую спутниковый датчик координат, последовательно соединенные пульт управления, датчик полярных координат ориентира и первый преобразователь координат, второй вход которого соединен с вторым выходом датчика полярных координат ориентира, датчик курса, выход которого соединен с третьим входом первого преобразователя координат, дополнительно введены блок коррекции и блок формирования относительных координат, первый пятый входы которого соединены соответственно с первым и вторым выходами первого преобразователя координат и первым третьим выходами блока коррекции, первый пятый входы которого соединены соответственно с первым и вторым выходами спутникового датчика координат, первым и вторым выходами первого преобразователя координат и вторым выходом пульта управления, при этом блок коррекции выполнен в виде последовательно соединенных первого блока запаздывания, первого блока разности, первого блока умножения, сумматора, блока деления, блок определения арктангенса и блока памяти, последовательно соединенных второго блока запаздывания, второго блока разности и второго блока умножения, выход которого соединен с вторым входом сумматора, последовательно соединенных третьего блока запаздывания, третьего блока разности, выход которого соединен с вторым входом первого блока умножения, третьего блока умножения, второй вход которого соединен с выходом второго блока разности, и четвертого блока разности, выход которого соединен с вторым входом блока деления, последовательно соединенных четвертого блока запаздывания, пятого блока разности, выход которого соединен с вторым входом второго блока умножения и четвертого блока умножения, второй вход которого соединен с выходом первого блока разности, а выход с вторым входом четвертого блока разности, последовательно соединенных шестого блока разности, первого релейного элемента, первого интегратора и седьмого блока разности, последовательно соединенных первого синусно-косинусного преобразователя, выход которого соединен с первым входом шестого блока разности, восьмого блока разности, второго релейного элемента, второго интегратора и девятого блока разности, выход которого соединен с вторым входом восьмого блока разности, вход первого блока запаздывания, второй вход первого блока разности и второй вход девятого блока разности соединены и являются первым входом блока коррекции, вход второго блока запаздывания, второй вход второго блока разности и второй вход седьмого блока разности объединены и являются вторым входом блока коррекции, вход третьего блока запаздывания, второй вход третьего блока разности и первый вход первого синусно-косинусного преобразователя объединены и являются третьим входом блока коррекции, вход четвертого блока запаздывания, второй вход пятого блока разности и второй вход первого синусно-косинусного преобразователя объединены и являются четвертым входом блока коррекции, второй вход блока памяти и управляющие входы первого и второго релейных элементов объединены и являются пятым входом блока коррекции, выход девятого блока разности соединен с вторым входом восьмого блока разности и является первым выходом блока коррекции, выход седьмого блока разности соединен с вторым входом шестого блока разности и является вторым выходом блока коррекции, выход блока памяти соединен с третьим входом первого синусно-косинусного преобразователя и является третьим выходом блока коррекции, а блок формирования относительных координат выполнен в виде последовательно соединенных второго синусно-косинусного преобразователя, третьего синусно-косинусного преобразователя и десятого блока разности, последовательно соединенных одиннадцатого блока разности и второго преобразователя координат, первый выход которого соединен с вторым входом десятого блока разности и является первым выходом блока формирования относительных координат, двенадцатого блока разности, первый вход которого соединен с первым выходом второго синусно-косинусного преобразователя, а выход с вторым входом второго преобразователя координат, четвертого синусно-косинусного преобразователя, первый и второй входы синусно-косинусного преобразователя являются соответственно первым и вторым входами блока формирования относительных координат, первый вход четвертого синусно-косинусного преобразователя и второй вход двенадцатого блока разности объединены и являются третьим входом блока формирования относительных координат, первый вход одиннадцатого блока разности объединен с вторым входом четвертого синусно-косинусного преобразователя и является четвертым входом блока формирования относительных координат, третий вход второго синусно-косинусного преобразователя является пятым входом блока формирования относительных координат, второй выход второго синусно-косинусного преобразователя соединен с вторым входом третьего синусно-косинусного преобразователя и вторым входом одиннадцатого блока разности, второй выход второго преобразователя координат соединен с третьими входами третьего и четвертого синусно-косинусного преобразователя и является вторым выходом блока формирования относительных координат, третьим, четвертым, пятым и шестым выходами которого являются соответственно первый и второй выходы четвертого синусно-косинусного преобразователя, выход десятого блока разности и второй выход третьего синусно-косинусного преобразователя.
На фиг.1 представлена структурная схема системы по прототипу, обозначения блоков приведено выше.
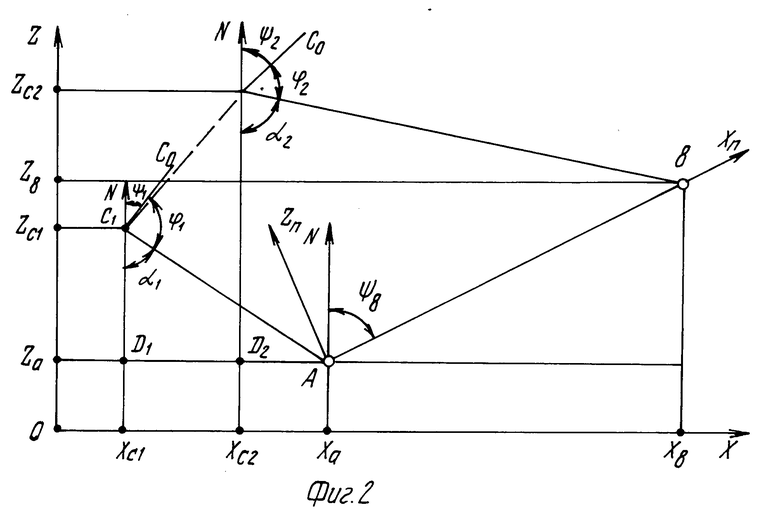
На фиг.2 представлено взаимное положение ЛА (точки С1, С2) относительно ВПП (точки А, В) в системе координат ZOX, где обозначено:
Хс1, Zс1 координаты ЛА при наведении ДПКО на ориентир А;
Хс2, Zс2 координаты ЛА при наведении ДПКО на ориентир В;
N направление на Север;
Ψ1 Ψ2 углы географического курса в точках С1, С2;
ϕ1 угол визирования ориентира А;
ϕ2 угол визирования ориентира В;
α1 180o ϕ1 Ψ1, α2 180o ϕ2 Ψ2;
Zа, Ха координаты ориентира А;
Zb, Xb координаты ориентира В;
ΨB географический курс ВПП (AВ L длина ВПП);
Zп AXп система координат связанная с ВПП;
Zс1а Zс1 Zа, Хс1а Ха-Хс1 координаты ЛА в точке С1относительно ориентира А;
Zс2а Zс2 Zа, Хс2а Ха Хс2 координаты ЛА в точке С2относительно ориентира А;
Zc2b Zc2 Zb, Хc2b Xb Хc2 координаты ЛА в точке С2относительно ориентира В.
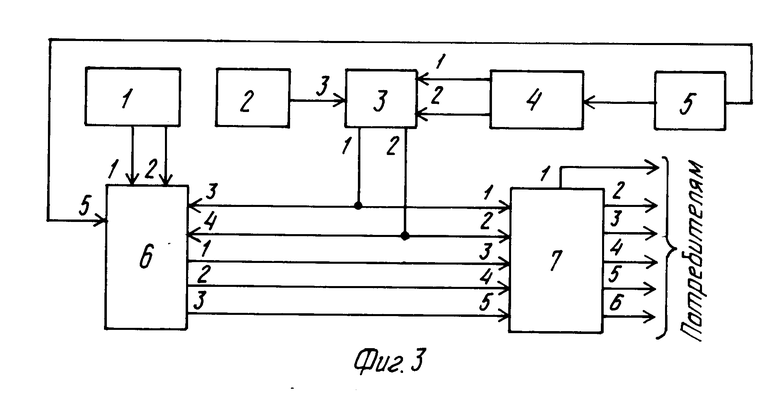
На фиг.3 представлена структурная схема предлагаемой системы, содержащей спутниковый датчик координат (СДК)1, датчик курса (ДК)2, первый преобразователь координат (ПК) 3, датчик полярных координат ориентира (ДПКО) 4, пульт управления (ПУ) 5, блок коррекции (БК) 6, блок формирования относительных координат (БФОК) 7.
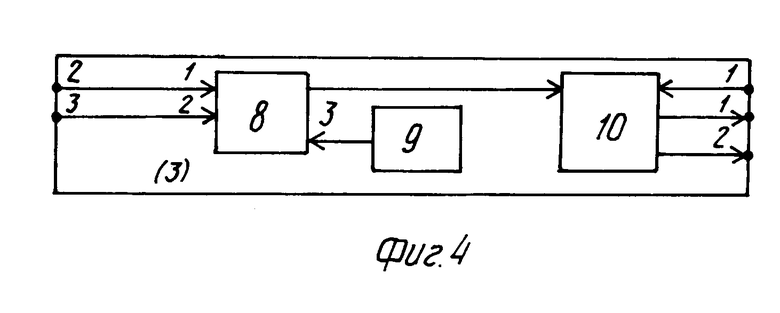
На фиг.4 представлена структурная схема первого преобразователя координат (ПК) 3, содержащего блок разности (БР) 8, задатчик постоянного параметра (ЗПП) 9, полярный преобразователь координат (ППК) 10.
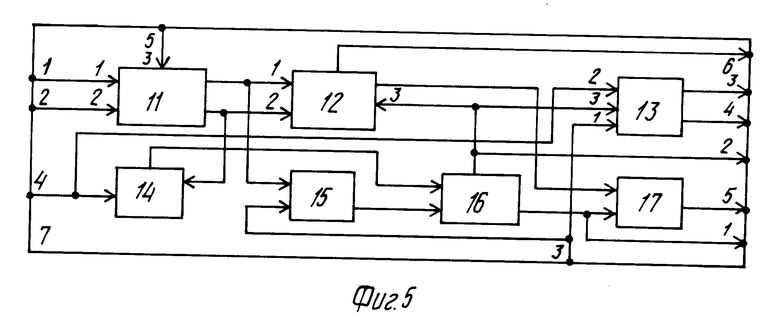
На фиг. 5 представлена структурная схема БФОК 7, содержащего второй, третий и четвертый синусно-косинусные преобразователи (СКП) 11, 12 и 13 соответственно, одиннадцатый, двенадцатый и десятый блоки разности (БР) 14, 15 и 17 соответственно, второй преобразователь координат (ПК) 16.
На фиг. 6 представлена структурная схема БК 6, содержащего первый четвертый блоки запаздывания (БЗ) 18 21 соответственно, первый девятый блоки разности (БР) 24, 25, 26, 41, 27, 28, 42, 29, 43 соответственно, первый четвертый блоки умножения (БУ) 32 35 соответственно, первый и второй релейные элементы (РЭ) 30 и 31, первый и второй интеграторы 36 и 37, блок памяти (БП) 22, первый синусно-косинусный преобразователь (СКП) 23, блок 39 определения арктангенса (БОА), сумматор С (38), блок 40 деления (БД).
Система работает следующим образом.
Подачей команды с одного выхода ПУ 5 на вход ДПКО 4 летчик (оператор) наводит ДПКО 4 на ориентир А (средина ближнего обреза ВПП).
В ДПКО 4 формируются параметры Da, ϕи1 ϕ1 + Δ ϕ, поступающие на первый и второй входы ПК 3, на третий вход которого с выхода ДК 2 поступает измеренный угол курса Ψи1 Ψ1 + Δ Ψ, поступающий на третий вход ПК 3.
В ПК 3 второй и третий входы подключены к первому и второму входам БР 8, на третий вход которого подключен постоянный сигнал π 180о с выхода ЗПП 9, в БР 8 формируется сигнал α1и=180o-ϕ1и-Ψ1и=α-Δϕ-ΔΨ=α-Δ, поступающий на один вход ППК 10, на другой вход которого подключен первый вход (сигнал Dа) ПК (3). В ППК 10, преобразующем полярные координаты Da, α1и в линейные, формируются сигналы
Хсаи Da sin α1и Хса соsΔ Zса sinΔ
Zсаи Dа cos α1и Zса cosΔ + Xca sinΔ поступающие соответственно на первый и второй выходы ПК 3, подключенные соответственно к третьему и четвертому входам БК 6, на первый и второй входы которого с одного и другого выходов СДК 1 поступают сигналы
Xси Xc1 + Δ1= Xa -Xca+ Δ1
Zси Zc1 + Δ2= Za -Zca+ Δ2
На пятый вход БК 6 поступает сигнал u (u +uo соответствует наведению ДПКО 4 на ориентир А и u -uо соответствует наведению ДПКО 4 на ориентир В) с другого выхода ПУ 5.
В БК 6 (фиг.6)
первый вход подключен к одному входу БР 43, одному входу БР 24 и к входу БЗ 18, где формируется сигнал
Хси(t- τ ) -Хса(t -τ ) + Xа +Δ1, поступающий на другой вход БР 24, где формируется сигнал
Хси(t- τ ) -Хси (t) Xca(t) Xca(t -τ )X1, поступающий на одни вход БУ 32, и на один вход БУ 35;
второй вход подключен к одному входу БР 42, к одному входу БР 25 и к входу БЗ 19, где формируется сигнал
Zси(t- τ ) Zса(t -τ ) + Zса +Δ2, поступающий на другой вход БР 25, где формируется сигнал
Zcи(t)-Zcи(t- τ ) Zca(t)-Zca(t- τ ) Z1, поступающий на один вход БУ 33 и на один вход БУ 34;
третий вход подключен к первому входу СКП 23, к одному входу БР 26 и к входу БЗ 20, где формируется сигнал Хсаи(t-τ ), поступающий на другой вход БР 26, где формируется сигнал Xcaи(t)-Хсaи(t- τ ) X1cos Δ- Z1 sin Δ= X2, поступающий на другой вход БУ 32 и на другой вход БУ 34;
четвертый вход подключен к второму входу СКП 23, к одному входу БР 27 и к входу БЗ 21, где формируется сигнал Zсаи(t τ ), поступающий на другой вход БР 27, где формируется сигнал Zcaи(t)-Zcaи(t- τ ) Z1 cosΔ + +X1 sin Δ Z2, поступающий на другой вход БУ 33 и на другой вход БУ 35, где формируется сигнал X1Z2, поступающий на один вход БР 41, на другой вход которого поступает сигнал Z1X2, сформированный в БУ 34; сформированный в БУ 32 сигнал X1X2 поступает на один вход С 38, на другой вход которого поступает сигнал Z1Z2, сформированный в БУ 33, в С 38 формируется сигнал (X1X2 + +Z1X2), поступающий на один вход БД 40, на другой вход которого с выхода БР 41 поступает сигнал (X1Z2-X2Z1).
В БД 40 формируется сигнал
v tgΔ  поступающий на вход БОА 39, где формируется сигнал Δ arctg v, поступающий на один вход БП 22, на другой вход которого поступает сигнал u с пятого входа БК 6; при u +uo (работа ДПКО 4 по ориентиру А) БП 22 пропускает сигнал Δ на свой выход, откуда сигнал Δ поступает на третий выход БК 6 и на третий вход СКП 23, где формируются сигналы действительных значений координат
поступающий на вход БОА 39, где формируется сигнал Δ arctg v, поступающий на один вход БП 22, на другой вход которого поступает сигнал u с пятого входа БК 6; при u +uo (работа ДПКО 4 по ориентиру А) БП 22 пропускает сигнал Δ на свой выход, откуда сигнал Δ поступает на третий выход БК 6 и на третий вход СКП 23, где формируются сигналы действительных значений координат
Xca Xcaи cosΔ + Zcaи sin Δ
Xca Zcaи cosΔ Xcaи sin Δ сигнал Хса с одного выхода СКП 23 поступает на один вход БР 29, на другой вход которого поступает сигнал откорректированной координаты Хсакс выхода БР 43, на другой вход которого поступает сигнал поправки δХ с выхода второго интегратора 37, в БР 29 формируется сигнал (Хса-Хсак), поступающий на вход РЭ 31, на другой вход которого поступает сигнал u с пятого выхода БК 6, РЭ 31 при u +uo пропускает сигнал (Хса-Хсак) на вход второго интегратора, где формируется сигнал
δx (xса- xсак)·  где Т постоянная времени; р оператор дифференцирования), в БР 43 формируется сигнал
где Т постоянная времени; р оператор дифференцирования), в БР 43 формируется сигнал
xсак= δx-xси= δx-(xa+Δ1-xса)  (xa+Δ1-xса) соответственно
(xa+Δ1-xса) соответственно
xсак= xса-  δx
δx  т.е. после окончания переходного процесса Хсак Хса δХ Ха + Δ1 и с выхода БР 43 сигнал Хсак Хса поступает на первый выход БК 6; сигнал Zса с другого выхода СКП 23 поступает на один вход БР 28, на другой вход которого поступает сигнал Zсак с выхода БР 42, сформированный в БР 28 сигнал (Zсак Zса) поступает на один вход РЭ 30, на другой вход которого поступает сигнал u с пятого выхода БК 6, при u +uo сигнал (Zcaк Zса) проходит с выхода РЭ 30 на вход первого интегратора 36, где формируется сигнал δZ (Zсак- Zса)·
т.е. после окончания переходного процесса Хсак Хса δХ Ха + Δ1 и с выхода БР 43 сигнал Хсак Хса поступает на первый выход БК 6; сигнал Zса с другого выхода СКП 23 поступает на один вход БР 28, на другой вход которого поступает сигнал Zсак с выхода БР 42, сформированный в БР 28 сигнал (Zсак Zса) поступает на один вход РЭ 30, на другой вход которого поступает сигнал u с пятого выхода БК 6, при u +uo сигнал (Zcaк Zса) проходит с выхода РЭ 30 на вход первого интегратора 36, где формируется сигнал δZ (Zсак- Zса)·  поступающий на другой вход БР 42, где формируется сигнал
поступающий на другой вход БР 42, где формируется сигнал
Zсак= Zси-δZ Za+ Zса+ Δ2- (Zсак- Zса)·  откуда
откуда
Zсак= Zса+ (Za+Δ2)  δZ
δZ  т.е. после окончания переходного процесса Zсак Zса, δZ Zа + Δ2; сигнал Zсак Zса с выхода БР 42 поступает на второй выход БК 6.
т.е. после окончания переходного процесса Zсак Zса, δZ Zа + Δ2; сигнал Zсак Zса с выхода БР 42 поступает на второй выход БК 6.
Через время τ > 3Т после окончания переходного процесса летчик подачей команды с одного выхода ПУ 5 наводит ДПКО 4 на ориентир В (средина обреза конца ВПП) и с другого выхода ПУ 5 выдает команду u -uo (соответствует наведению ДПКО 4 на ориентир В), сигналы DВ, ϕ2и ϕ2 + Δ ϕ с одного и другого выходов ДПКО 4 поступают на первый и второй входы ПК 3, на третий вход которого с выхода ДК 2 поступает сигнал Ψи2 Ψ2 + Δ Ψ сформированные в ПК 3 сигналы XcBи XcB cos Δ Z cB sin Δ ZcBи ZcB cosΔ + XcB sin Δ с первого и второго выходов ПК 3 поступают соответственно на первый и второй входы БФОК 7.
По сигналу u -uo в БП 22 запоминается сигнал Δo Δ поступающий на третий выход БК 6, по сигналу u -uo c выходов РЭ 30 и 31 на входы первого интегратора 36 и второго интегратора 37 поступают нулевые сигналы, в соответствии с которыми на выходах первого 36 и второго 37 интеграторов запоминаются сигналы δ X Xa + Δ1, δ Z Za+ Δ2 соответственно, на выходах БР 42 и 43 имеют место сигналы Zсак Zса, Хсак Хса. Сигналы Хсак, Zсак, Δo Δ с первого третьего выходов БК 6 поступают соответственно на третий пятый входы БФОК 7.
В БФОК 7 ( фиг. 5), первый, второй, пятый входы подключены к СКП 11, где формируются сигналы
XсВ ХсВи сos Δ + Z cВи sinΔ
Z cB ZcBи cosΔ XcBи sin Δ поступающие соответственно на первый и второй входы СКП 12, кроме того, сигнал ХсВ с одного выхода СКП 11 поступает на один вход БР 15, а сигнал ZсВ с другого выхода СКП 11 поступает на один вход БР 14.
Сигнал Zсак Zса с четвертого входа БФОК 7 поступает на второй вход СКП 13 и на другой вход БР 14, где формируется сигнал Z3 Zса ZсВ, поступающий на один вход ПК 16.
Сигнал Хсак=Хса с третьего входа БФОК 7 поступает на первый вход СКП 13 и на другой вход БР 15, где формируется сигнал X3 ХсВ Хса, поступающий на другой вход ПК 16, преобразующий линейные координаты Х3, Z3 в полярные
L  Ψв= arctg
Ψв= arctg 
Сигнал длины ВПП L с одного выхода ПК 16 поступает на первый выход БФОК 7 и на один вход БР 17, сигнал курса ВПП ΨB с другого выхода ПК 16 поступает на второй выход БК 6, на третий вход СКП 12 и на третий вход СКП 13, где формируются сигналы координат месторасположения ЛА в системе координат ХпАZп, связанной с ВПП,
Хсп1 Zса sin ΨB Xca cos ΨB
Zсп1 Zса сos ΨB + Xca sin ΨB которые с одного и другого выходов СКП 13 поступают соответственно на третий и четвертый выход БФОК 7.
В СКП 12 формируются сигналы Zсп2 ХсВ sin ΨB + ZсВ сos ΨB, Zo= XсВ сos ΨB ZcB sin ΨB при этом сигнал Zсп2 поступает на шестой выход БФОК 7, а сигнал Zо с другого выхода СКП 12 поступает на другой вход БР 17, где формируется сигнал Хсп2 L Zo, поступающий на пятый выход БФОК 7. С первого шестого выходов БФОК 7 точные информационные сигналы L, ΨB Хсп1, Zсп1, Хсп2, Zсп2 выдаются потребителям для решения задачи захода на посадку,
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ | 1992 |
|
RU2023984C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ | 1998 |
|
RU2146805C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ КОДА УГЛА В СИНУСНО-КОСИНУСНЫЕ НАПРЯЖЕНИЯ | 2001 |
|
RU2196383C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД | 1991 |
|
SU1826836A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
Изобретение относится к авиационному приборостроению, в частности к средствам информационного обеспечения захода летательных аппаратов на посадку на аэродромы с неизвестными координатами и параметрами взлетно-посадочной полосы. Технико-экономический эффект, достигаемый при использовании изобретения, заключается в повышении точности навигационного обеспечения захода на посадку. Это достигается путем дополнительного введения в навигационную систему блока 6 коррекции и блока формирования относительных координат, а также выполнения блока коррекции на основе четырех блоков 18 21 запаздывания, девяти блоков 24 29, 41 43 разности, четырех блоков 32 35 умножения, двух релейных элементов 30 и 31, двух интеграторов 36 и 37, блока 22 памяти, синусно-косинусного преобразователя 23, блока 39 определения арктангенса, сумматора 38 и блока 40 деления, а блока формирования относительных координат на основе трех синусно-косинусных преобразователей, трех блоков разности, и преобразователя координат. 6 ил.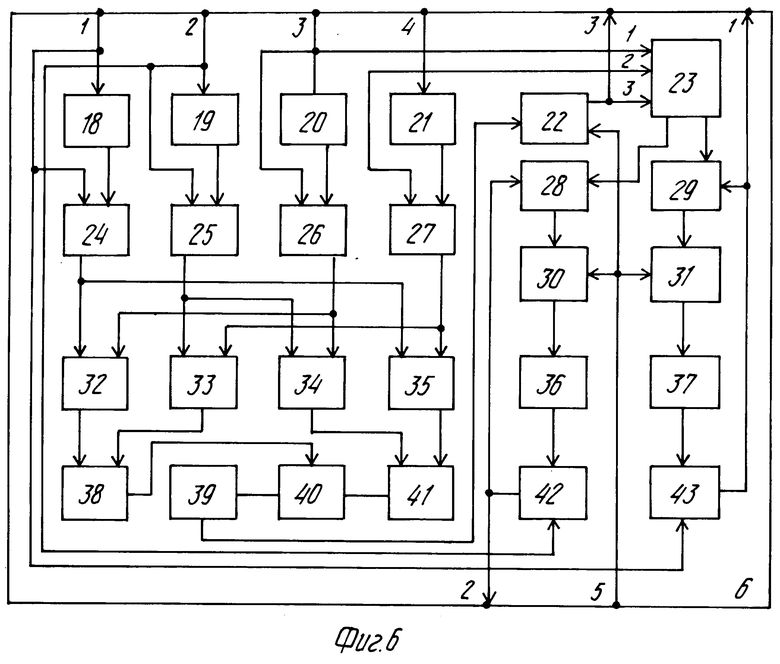
КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ, содержащая спутниковый датчик координат, последовательно соединенные пульт управления, датчик полярных координат ориентира и первый преобразователь координат, второй вход которого соединен с вторым выходом датчика полярных координат ориентира, датчик курса, выход которого соединен с третьим входом первого преобразователя координат, отличающаяся тем, что в нее дополнительно введены блок коррекции и блок формирования относительных координат, первый-пятый входы которого соединены соответственно с первым и вторым выходами первого преобразователя координат и первым-третьим выходами блока коррекции, первый-пятый входы которого соединены соответственно с первым и вторым выходами спутникового датчика координат, первым и вторым выходами первого преобразователя координат и вторым выходом пульта управления, при этом блок коррекции выполнен в виде последовательно соединенных первого блока запаздывания, первого блока разности, первого блока умножения, сумматора, блока деления, блока определения арктангенса и блока памяти, последовательно соединенных второго блока запаздывания, второго блока разности и второго блока умножения, выход которого соединен с вторым входом сумматора, последовательно соединенных третьего блока запаздывания, третьего блока разности, выход которого соединен с вторым входом первого блока умножения, третьего блока умножения, второй вход которого соединен с выходом второго блока разности, и четвертого блока разности, выход которого соединен с вторым входом блока деления, последовательно соединенных четвертого блока запаздывания, пятого блока разности, выход которого соединен с вторым входом второго блока умножения, и четвертого блока умножения, второй вход которого соединен с выходом первого блока разности, а выход с вторым входом четвертого блока разности, последовательно соединенных шестого блока разности, первого релейного элемента, первого интегратора и седьмого блока разности, последовательно соединенных первого синусно-косинусного преобразователя, выход которого соединен с первым входом шестого блока разности, восьмого блока разности, второго релейного элемента, второго интегратора и девятого блока разности, выход которого соединен с вторым входом восьмого блока разности, вход первого блока запаздывания, второй вход первого блока разности и второй вход девятого блока разности объединены и являются первым входом блока коррекции, вход второго блока запаздывания, второй вход второго блока разности и второй вход седьмого блока разности объединены и являются вторым входом блока коррекции, вход третьего блока разности и первый вход первого синусно-косинусного преобразователя объединены и являются третьим входом блока коррекции, вход четвертого блока запаздывания, второй вход пятого блока разности и второй вход первого синусно-косинусного преобразователя объединены и являются четвертым входом блока коррекции, второй вход блока памяти и управляющие входы первого и второго релейных элементов объединены и являются пятым входом блока коррекции, выход девятого блока разности соединен с вторым входом восьмого блока разности и является первым выходом блока коррекции, выход седьмого блока разности соединен с вторым входом шестого блока разности и является вторым выходом блока коррекции, выход блока памяти соединен с третьим входом первого синусно-косинусного преобразователя и является третьим выходом блока коррекции, а блок формирования относительных координат выполнен в виде последовательно соединенных второго синусно-косинусного преобразователя, третьего синусно-косинусного преобразователя и десятого блока разности, последовательно соединенных одиннадцатого блока разности и второго преобразователя координат, первый выход которого соединен с вторым входом десятого блока разности и является первым выходом блока формирования относительных координат, двенадцатого блока разности, первый вход которого соединен с первым выходом второго синусно-косинусного преобразователя, а выход с вторым входом второго преобразователя координат, четвертого синусно-косинусного преобразователя, первый и второй входы второго синусно-косинусного преобразователя являются соответственно первым и вторым входами блока формирования относительных координат, первый вход четвертого синусно-косинусного преобразователя и второй вход двенадцатого блока разности объединены и являются третьим входом блока формирования относительных координат, первый вход одиннадцатого блока разности объединен с вторым входом четвертого синусно-косинусного преобразователя и является четвертым входом блока формирования относительных координат, третий вход второго синусно-косинусного преобразователя является пятым входом блока формирования относительных координат, второй выход второго синусно-косинусного преобразователя соединен с вторым входом третьего синусно-косинусного преобразователя и вторым входом одиннадцатого блока разности, второй выход второго преобразователя координат соединен с третьими входами третьего и четвертого синусно-косинусных преобразователей и является вторым выходом блока формирования относительных координат, третьим, четвертым, пятым и шестым выходами которого являются соответственно первый и второй выходы четвертого синусно-косинусного преобразователя, выход десятого блока разности и второй выход третьего синусно-косинусного преобразователя.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Бортовой комплекс радиоэлектронного оборудования самолета "Ямал" | |||
| Эскизный проект | |||
| Моск | |||
| обл., РПКБ, 1991. | |||
