Изобретение относится к области авиационного приборостроения, в частности к системам управления высотой полета летательных аппаратов.
Известны системы управления, обеспечивающие управление высотой полета по заданному сигналу высоты, приведенные в книге Михалева И.А. и др. "Системы автоматического управления самолетами". М.Машиностроение, 1971 г. на стр. 255-259. Наиболее близкой является система, описанная в книге Загайнова Г.И. Гуськова Ю.П. "Управлением полетом самолетов", М. Машиностроение, 1980 г. на стр. 161. Она содержит задатчик высоты полета ЗВП, блок разности БР, контур стабилизации КС, блок информационных датчиков БИД. Сигнал заданной высоты полета Н, выдаваемый программно или вручную оператором, с выхода ЗВП поступает на первый вход БР, на второй и третий входы которого с первого и второго выходов БИД поступают соответственно сигналы текущей высоты H и вертикальной скорости  Hp (p оператор дифференцирования).
Hp (p оператор дифференцирования).
На выходе БР формируется сигнал управления
Hy=(H3-H-HpT)k1 (здесь k1 - коэффициент передачи, T постоянная времени), поступающий на вход КС, имеющего передаточную функцию.
тогда в замкнутом контуре управления высотой будет ,
,
откуда следует, что при оптимальных (обеспечивающих требуемое количество регулирования параметрах контура стабилизации КС Ko, ξ0, Toобеспечить заданное качество управления по высоте выбором коэффициентов K, T не представляется возможным. Кроме того параметры Ko, ξ0 To являются оптимальными по режимам полета, что функционально представляется в виде
где ai, bi, ci постоянные величины, q скоростной напор, v истинная воздушная скорость.
Функциональное изменение параметров КС Ko, ξ0, To также может привести к ухудшению показателей качества регулирования в системе управления второй полета.
Технико-экономическим эффектом, достигаемым при использовании предлагаемого технического решения, является обеспечение заданного качества регулирования в замкнутой системе управления высотой полета при заданных показателях качества регулирования контура стабилизации.
Достигается это тем, что в систему управления, содержащую задатчик высоты полета, блок разности, контур стабилизации, блок информационных датчиков, причем выход задатчика высоты полета подключен к первому входу блока разности, на второй и третий входы которого подключены соответственно первый и второй выходы блока информационных датчиков, дополнительно введены, включенные между выходом блока разности и входом контура стабилизации последовательно соединенные первый интегратор, второй интегратор, блок суммирования, блок деления, включенные между третьим выходом блока информационных датчиков и вторым входом блока суммирования последовательно соединенные первый функциональный преобразователь и первый блок умножения, на второй вход которого подключен выход блока разности, включенные между третьим выходом блока информационных датчиков и третьим входом блока суммирования последовательно соединенные второй функциональный преобразователь и второй блок умножения, на второй вход которого подключен выход первого интегратора, включенный между четвертым выходам блока информационных датчиков и вторым входом блока деления третий функциональный преобразователь, причем на четвертый и пятый входы блока разности подключены соответственно выход первого интегратора и выход второго интегратора.
На чертеже представлена блок-схема предлагаемой системы.
Система работает следующим образом.
С выхода ЗВП (2) сигнал заданной высоты полета H3 поступает на первый вход БР (1), на второй, третий, четвертый и пятый входы которого поступают, соответственно, сигналы текущей высоты H с первого выхода БИД (4), текущей вертикальной скорости  Hp со второго выхода БИД (4), сигнала
Hp со второго выхода БИД (4), сигнала  Zp с выхода интегратора И1 (5), сигнала "Z" с выхода интегратора И2 (6).
Zp с выхода интегратора И1 (5), сигнала "Z" с выхода интегратора И2 (6).
В БР (1) формируется сигнал ,
,
поступающий на второй вход блока умножения БУ1 (9) и на вход И1 (5), где формируется сигнал  Zp, поступающий на второй вход блока умножения БУ2 (12) и на вход И2 (6), где формируется сигнал
Zp, поступающий на второй вход блока умножения БУ2 (12) и на вход И2 (6), где формируется сигнал ,
,
поступающий на первый вход блока суммирования БС (7).
Сигнал истинной воздушной скорости V с третьего выхода БИД (4) поступает на выход функционального преобразователя ФП (2) и на вход ФП (1), где при известных постоянных C0, C1, C2 формируется сигнал f1=(C0+C1V+C2V2)2= T , поступающий на второй вход БС(7).
, поступающий на второй вход БС(7).
В ФП(2) по сигналу V и известных постоянных C0, C1, C2 b0, b1, b2 формируется сигнал f2= 2(C0+C1V+C2V2)(b0+b1V+ b2V2)= 2ξ01T01, поступающий на первый вход БУ2(12), где формируется сигнал  , поступающий на третий вход БС(7), где формируется сигнал
, поступающий на третий вход БС(7), где формируется сигнал  при медленных изменениях T01, ξ01
при медленных изменениях T01, ξ01 .
.
Сигнал y с выхода БС(7) поступает на первый вход блока деления БД(8). Сигнал скоростного напора "g" с четвертого выхода БИД(4) поступает на вход ФПЗ (13), где при известных постоянных a0, a1, a2, K формируется сигнал m= (a0+a1g+a2g2)K= K01K, поступающий на второй вход БД(8), где формируется сигнал y/m, поступающий на вход КС(3), имеющего функцию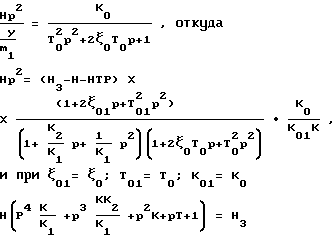 ,
,
откуда следует, что выбором постоянных коэффициентов T, K, K1, K2 обеспечивается заданное качество регулирования в системе управления высотой при сохранении заданного качества регулирования в КСЗ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ | 1992 |
|
RU2023984C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2147009C1 |
| СИСТЕМА УПРАВЛЕНИЯ КАТАПУЛЬТИРУЕМЫМ КРЕСЛОМ СПАСЕНИЯ ЭКИПАЖА | 1998 |
|
RU2144888C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
Область использования: авиационное приборостроение, в частности системы управления летательными аппаратами в продольной плоскости. Сущность: система управления высотой полета обеспечивает заданное качество регулирования в замкнутой системе управления по высоте полета при функциональном изменении параметров контура стабилизации. В систему дополнительно вводятся два последовательно соединенных интегратора, два блока умножения, блок деления, три функциональных преобразователя. При этом обеспечивается параметрическая стационаризация замкнутого контура управления по высоте, и как следствие этого выполняются условия заданного качества переходных процессов по заданной высоте полета без изменения выбранных параметров контура стабилизации. 1 ил.
Система управления высотой полета, содержащая задатчик высоты полета, блок разности, контур стабилизации, блок информационных датчиков, причем выход задатчика высоты полета подключен к первому входу блока разности, на второй и третий входы которого подключены соответственно первый и второй выходы блока информационных датчиков, отличающаяся тем, что в нее дополнительно введены включенные между выходом блока разности и входом контура стабилизации последовательно соединенные первый интегратор, второй интегратор, блок суммирования, блок деления, включенные между третьим выходом блока информационных датчиков и вторым входом блока суммирования последовательное соединенные первый функциональный преобразователь и первый блок умножения, на второй вход которого подключен выход блока разности, включенные между третьим выходом блока информационных датчиков и третьим входом блока суммирования последовательные второй функциональный преобразователь и второй блок умножения, на второй вход которого подключен выход первого интегратора, включенный между четвертым выходом блока информационных датчиков и вторым входом блока деления третий функциональный преобразователь, причем на четвертый и пятый входы блока разности подключены соответственно выход первого интегратора и выход второго интегратора.
| Загайнов Г.И., Гуськов Ю.П | |||
| Управление полетом самолетов | |||
| - М.: Машиностроение, 1980, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
