Изобретение относится к области авиационного приборостроения, в частности к бортовому информационному оборудованию относительной навигации и целеуказания тактических групп летательных аппаратов - самолетов, вертолетов, крылатых ракет.
Известен комплекс информационного обеспечения группового взаимодействия, содержащий инерциально-спутниковый датчик координат, блок приема и передачи данных, датчик (радиолокационный или оптиколокационный) координат цели, блок формирования относительных координат, описание которого приведено в книге [1] под редакцией Харисова В.Н., Перова А.И., Болдина В.А. "Глобальная спутниковая радионавигационная система ГЛОНАСС", Москва, ИПРЖР, 1998 г., стр. 177, 178, 343. В данной системе, являющейся наиболее близким аналогом заявляемого изобретения, осуществляется формирование относительных координат любых двух взаимодействующих объектов группы летательного аппарата на основе взаимного обмена через блок передачи данных инерциально-спутниковыми координатами и координатами летательных аппаратов относительно целей, одновременно лоцируемых датчиками координат целей взаимодействующих летательных аппаратов.
При этом точностные характеристики относительного инерциально-спутникового режима обеспечиваются только при работе спутниковых систем взаимодействующих объектов по одинаковым созвездиям навигационных спутников, а погрешности относительных координат, определяемых на основе измерений датчиков координат цели, при точных дальномерных измерениях определяются дальностью до цели Д и погрешностью угломерных измерений Δ, примерно δX = Δ•D, что при дальности Д = 10 км, Δ = 0,6o составит δХ = 100 м, что приводит к существенным сложностям при выполнении группового полета летательных аппаратов в плотных боевых порядках (с дистанциями и интервалами 70-300 м) и соответственно является недостатком известной системы. Задачей изобретения является повышение точности работы комплекса и расширение его функциональных возможностей.
Технический результат достигается тем, что в комплекс информационного обеспечения группового взаимодействия летательных аппаратов, содержащий последовательно соединенные инерциально-спутниковый датчик координат, блок приема и передачи данных и блок формирования относительных координат, а также датчик координат цели, выход которого подключен ко второму входу блока приема и передачи данных и ко второму входу блока формирования относительных координат, на третий вход которого подключен первый выход инерциально-спутникового датчика координат, второй выход которого подключен ко входу датчика координат цели, дополнительно введены последовательно соединенные блок задержки, блок разделения погрешностей, блок оптимальной фильтрации, блок формирования поправок, выход которого подключен к четвертому входу блока формирования относительных координат, выход которого подключен к первому входу блока задержки, а также включенный между вторым выходом блока разделения погрешностей и вторым входом блока оптимальной фильтрации блок формирования параметрических функций, второй и третий входы которого соединены соответственно со вторыми и третьими входами блока формирования поправок, блока разделения погрешностей, блока задержки, первым выходом блока приема и передачи данных и выходом датчика координат цели, причем второй выход блока оптимальной фильтрации подключен к пятому входу блока формирования относительных координат.
На чертеже представлена блок-схема предлагаемого комплекса, содержащего:
1 - инерциально-спутниковый датчик координат ИСДК;
2 - блок приема и передачи данных БППД;
3 - датчик координат цели ДКЦ;
4 - блок формирования относительных координат БФОК;
5 - блок формирования поправок БФП;
6 - блок задержки БЗ;
7 - блок формирования параметрических функций БФПФ;
8 - блок оптимальной фильтрации БОФ;
9 - блок разделения погрешностей БРП.
Комплекс работает следующим образом. ИСДК 1 измеряет координаты местоположения летательного аппарата (ЛА) в земной системе координат - X1 (продольная координата), Z1 (боковая координата), Y1 (высота), которые с первого выхода ИСДК 1 поступают на первый вход БППД 2 и на третий вход БФОК 4, и углы эволюций ЛА - ψ1 (курс), ϑ1 (тангаж), γ1 (крен), которые со второго выхода ИСДК 1 поступают на вход ДКЦ 3. ДКЦ 3 является, например, оптиколокационным или радиолокационным датчиком координат цели, который при локации наземной, воздушной, неподвижной или подвижной цели измеряет дальность Д1 и углы визирования цели Φ1, ϕ1, которые пересчитываются через углы ψ1, γ1, ϑ1 в координаты цели относительно ЛА:
в системе координат, аналогичной измерениям координат ИСДК 1. Например, при γ1= ϑ1= 0, φ1= 0, Y1ц= 0

при этом погрешности измерений 
где  - флюктуационные погрешности типа белого шума,
- флюктуационные погрешности типа белого шума,
β1 - систематическая погрешность. Координаты цели относительно ЛА X1ц, Y1ц, Z1ц с выхода ДКЦ 3 поступают на второй вход БППД 2 и на второй вход БФОК 4 и на третьи входы БЗ 6, БРП 9, БФПФ 7, БФП 5. БППД 2 обеспечивает прием по третьему входу с взаимодействующего ЛА, датчик координат цели которого лоцирует ту же цель, следующих данных - X2, Y2, Z2, X2ц, Y2ц, Z2ц, которые с первого выхода БППД 2 поступают на первый вход БФОК 4 и на вторые БЗ 6, БРП 9, БФПФ 7, БФП 5. Параметры X1, Y1, Z1, Y1ц, X1ц, Z1ц со второго выхода БППД 2 передаются для приема взаимодействующими ЛА.
В БФОК 4, выполненном на элементах алгебраического суммирования, формируются относительные координаты взаимодействующих ЛА на основе инерциально-спутниковых измерений:
(здесь X0, Z0 - точные значения относительных координат, Δ1, Δ2 - систематические погрешности,  - флюктуационные погрешности типа белого шума), относительные координаты взаимодействующих ЛА на основе измерений датчиков координат цели:
- флюктуационные погрешности типа белого шума), относительные координаты взаимодействующих ЛА на основе измерений датчиков координат цели:
(здесь  - флюктуационные погрешности типа белого шума, β2/ - систематическая погрешность) и разностные сигналы
- флюктуационные погрешности типа белого шума, β2/ - систематическая погрешность) и разностные сигналы

где  - белый шум единичной интенсивности,
- белый шум единичной интенсивности,
Сигналы δX1, δZ1 с первого выхода БФОК 4 поступают на первый вход БЗ 6 и на четвертый вход БРП 9.
В БЗ 6, выполненном на элементах задержки, по поступившим сигналам формируются сигналы с задержкой на время τ:
которые с выхода БЗ 6 поступают на первый вход БРП 9, который по техническому исполнению является арифметическим устройством, выполняющим операции алгебраического суммирования, умножения, деления (см., например, книгу [2] Преснухина Л. Н. , Нестерова П. В. "Цифровые вычислительные машины", Москва, Высшая школа, 1981 г., стр. 329).
В БРП 9 осуществляются следующие операции:
- формирование разностей δX = δX1-δX2, δZ = δZ1-δZ2
- формирование разностей
δX1ц= X1ц(t)-X1ц(t-τ), δX2ц= X2ц(t)-X2ц(t-τ),
δZ1ц= Z1ц(t)-Z1ц(t-τ), δZ2ц= Z2ц(t)-Z2ц(t-τ),
- формирование определителя системы
Oc= δZ1ц•δX2ц+δX1ц•δZ2ц,
- формирование определителя β1
O1= δX•δX2ц+δZ•δZ2ц,
- формирование определителя β2
O2= δZ•δZ1ц-δX•δX1ц,
- формирование β1и, β2и
- формирование сигналов
- формирование сигналов
Сигналы β1и, β2и, Δ1и, Δ2и c первого выхода БРП 9 поступают на первый вход БОФ 8.
Сигналы C1, C2, C3, C4 со второго выхода БРП 9 поступают на первый вход БФПФ 7, являющегося арифметическим устройством ([2], стр. 329), в котором по поступившим сигналам на операциях суммирования, умножения и деления формируются параметрические функции:
F1 2 = a0 2 + a1 2(Z1ц 2 + Z2ц 2) + b1 2(X1ц 2 + X2ц 2),
F2 2 = a0 2 + a1 2(X1ц 2 + X2ц 2) + b1 2(Z1ц 2 + Z2ц 2),
n1 = N1 -2 = [2(F1 2 • C4 2 + F2 2 • C2 2],
n2 = N2 -2 = [2(F1 2 • C3 2 + F2 2 • C1 2],
n3 = N3 -2 = (F1 2 + N1 2 • X1ц 2 + N2 2 • X2ц 2)-1,
n4 = N4 -2 = (F2 2 + N1 2 • Z1ц 2 + N2 2 • Z2ц 2)-1,
Сигналы параметрических функций n1, n2, n3, n4 с выхода БФПФ 7 поступают на второй вход БОФ 8, на первый вход которого поступили сигналы  (при i = 1 γ1= β1; при i = 2 γ2= β2, при i = 3 γ3= Δ1, при i = 4 γ4= Δ2 ).
(при i = 1 γ1= β1; при i = 2 γ2= β2, при i = 3 γ3= Δ1, при i = 4 γ4= Δ2 ).
В БОФ 8 (см. [3] книгу Э.Сейджа, Д. Мелса "Теория оценивания и ее применение в связи и управлении", Москва, Связь, 1976, стр. 287-289) по каждому сигналу ni, γiи выполняются операции:
- интегрирования ∫nidt , i = 1; 2; 3; 4,
- деления  ;
;
- алгебраического суммирования  ;
;
- умножения  ;
;
- интегрирования 
где  - сигналы оптимальных оценок систематических составляющих γi на фоне шума
- сигналы оптимальных оценок систематических составляющих γi на фоне шума  c дисперсией
c дисперсией  .
.
Например, при n1 = 1 = const дисперсия погрешности  (здесь T0 -1 - начальное значение дисперсии) со временем стремится к нулю, соответственно математическое ожидание
(здесь T0 -1 - начальное значение дисперсии) со временем стремится к нулю, соответственно математическое ожидание
откуда следует, что со временем  , т.е. оптимальная оценка стремится к действительному значению систематической погрешности.
, т.е. оптимальная оценка стремится к действительному значению систематической погрешности.
Оптимальные оценки погрешностей  с первого выхода БОФ 8 поступают на первый вход БФП 5, оптимальные оценки погрешностей
с первого выхода БОФ 8 поступают на первый вход БФП 5, оптимальные оценки погрешностей  со второго выхода БОФ 8 поступают на пятый вход БФОК 4.
со второго выхода БОФ 8 поступают на пятый вход БФОК 4.
В БФП 5 по поступившим сигналам на элементах умножения формируются поправки  которые с выхода БФП 5 поступают на четвертый вход БФОК 4, в котором формируются откорректированные сигналы:
которые с выхода БФП 5 поступают на четвертый вход БФОК 4, в котором формируются откорректированные сигналы:
которые со второго выхода БФОК 4 выдаются потребителям (в систему индикации, в систему управления групповым полетом),
которые с третьего выхода БФОК 4 выдаются потребителям,
которые с четвертого выхода БФОК 4 выдаются потребителям (в систему индикации, в систему прицеливания, в систему управления ЛА),
которые с пятого выхода БФОК 4 выдаются потребителям.
Все откорректированные составляющие координат значительно (на величину систематических составляющих) точнее измеренных величин, а формирование синтезированных откорректированных составляющих координат целеуказания  ,
,  при отсутствии локации цели на данном ЛА обеспечивает расширение функциональных возможностей комплекса, что свидетельствует о достижении технического результата.
при отсутствии локации цели на данном ЛА обеспечивает расширение функциональных возможностей комплекса, что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ СОСТАВЛЯЮЩИХ ПУТЕВОЙ СКОРОСТИ | 2000 |
|
RU2168153C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ | 1992 |
|
RU2023984C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 1995 |
|
RU2089449C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2168154C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
Изобретение предназначено для использования в составе бортового оборудования, обеспечивающего выполнение координированных групповых действий. Технический результат заключается в повышении точностных параметров относительной навигации, а также повышении точностных характеристик параметров целеуказания и формировании параметров целеуказания при потере контакта с целью на одном из взаимодействующих летательных аппаратов, чем достигается расширение функциональных возможностей комплекса и соответственно повышение показателей боевой эффективности группы летательных аппаратов, которые оснащены предлагаемым комплексом. Комплекс содержит инерциально-спутниковый датчик координат, блок приема и передачи данных, датчик координат цели, блок формирования относительных координат и дополнительно введенные блок задержки, блок разделения погрешностей, блок оптимальной фильтрации, блок формирования поправок и блок формирования параметрических функций. 1 ил.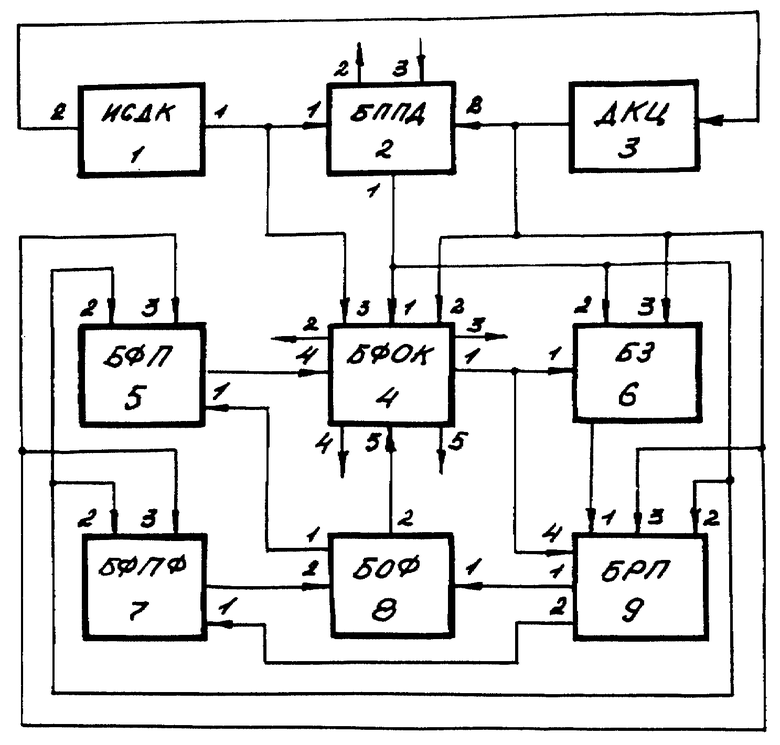
Комплекс информационного обеспечения группового взаимодействия летательных аппаратов, содержащий последовательно соединенные инерциально-спутниковый датчик координат, блок приема и передачи данных и блок формирования относительных координат, а также датчик координат цели, выход которого подключен ко второму входу блока приема и передачи данных и ко второму входу блока формирования относительных координат, на третий вход которого подключен первый выход инерциально-спутникового датчика координат, второй выход которого подключен ко входу датчика координат цели, отличающийся тем, что в него дополнительно введены последовательно соединенные блок задержки, блок разделения погрешностей, блок оптимальной фильтрации, блок формирования поправок, выход которого подключен к четвертому входу блока формирования относительных координат, выход которого предназначен для подачи сигналов на первый вход блока задержки и четвертый вход блока разделения погрешностей, а также включенный между вторым выходом блока разделения погрешностей и вторым входом блока оптимальной фильтрации блок формирования параметрических функций, второй и третий входы которого соединены соответственно со вторым и третьим входами блока формирования поправок, блока разделения погрешностей, блока задержки, первым выходом блока приема и передачи данных, выходом датчика координат цели, причем второй выход блока оптимальной фильтрации подключен к пятому входу блока формирования относительных координат.
| Глобальная спутниковая радионавигационная система ГЛОНАСС/Под ред | |||
| ХАРИСОВА В.Н | |||
| и др | |||
| -М.: ИПРЖР, 1998, с | |||
| Кулисный парораспределительный механизм | 1920 |
|
SU177A1 |
| СИСТЕМА ИНДИКАЦИИ ПОЛОЖЕНИЯ | 1992 |
|
RU2108627C1 |
| СПОСОБ ПЕРЕРАБОТКИ УГЛЕВОДОРОДНОГО СЫРЬЯ НА ОСНОВЕ АЛИФАТИЧЕСКИХ УГЛЕВОДОРОДОВ | 1998 |
|
RU2152977C1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

