Изобретение относится к области авиационного приборостроения, в частности к комплексам бортового оборудования самолетов, обеспечивающего определение координат целей, например, при проведении разведывательных операций.
Известны прицельно-навигационные комплексы определения координат целей, описания которых приведены в книге [1] К.Ф.О'Доннела "Инерциальная навигация", Москва, Наука, 1969 г., стр. 413-421, в книге [2] Р.В.Мубаракшина и др. "Прицельные системы стрельбы", Москва, ВВИА им. Жуковского, 1973, стр. 299-301, в книге [3] О.А. Бабича "Обработка информации в навигационных комплексах", Москва, Машиностроение, 1991 г., стр. 485-191.
В качестве прототипа принимается, описанный в [3] прицельно-навигационный комплекс, содержащий: систему навигации СН, задатчик координат ориентиров и времени ЗКОВ, индикационно-отрабатывающую систему ИОС, прицельную систему ПС, блок алгебраического суммирования БАС, блок интеграторов неподвижных целей БИНЦ, блок интеграторов ориентиров БИО, блок интеграторов подвижных целей БИПЦ.
При определении координат неподвижных целей и координат и скоростей подвижных целей в контурах ПС-БАС-СН-БИНЦ, ПС-БАС-СН-БИПЦ формируются координаты и скорости целей с определяемыми в основном режимами работы СН, погрешностями по координатам от десятков метров до единиц километров и погрешностями по скоростям 0,1 - 1 м/с (см. например, [4], И.И.Помыкаев и др. "Навигационные приборы и системы", Москва, Машиностроение, 1983 г., стр. 396), что является недостатком прототипа.
Техническим результатом, обеспечиваемым при использовании предлагаемого технического решения, является повышение точности определения координат неподвижных целей и координат и составляющих скорости подвижных (особенно наземных и морских) целей.
Достигается технический результат тем, что в комплекс, содержащий систему навигации, прицельную систему, индикационно-отрабатывающую систему, задатчик координат ориентиров и времени, блок алгебраического суммирования, блок интеграторов неподвижных целей, блок интеграторов ориентиров, блок интеграторов подвижных целей, дополнительно введены блок поправок координат неподвижных целей, обеспечивающий формирование точных значений координат обнаруженных неподвижных целей, и блок поправок параметров подвижных целей, обеспечивающий формирование точных значений параметров движения (координат, скоростей, ускорений) обнаруженных подвижных целей по данным блока интеграторов ориентиров.
На чертеже представлена блок-схема предлагаемой системы, содержащей:
1 - система навигации СН,
2 - задатчик координат ориентиров и времени ЗКОВ,
3 - индикационно-отрабатывающая система ИОС,
4 - прицельная система ПС,
5 - блок алгебраического суммирования БАС,
6 - блок интеграторов неподвижных целей БИНЦ,
7 - блок интеграторов ориентиров БИО,
8 - блок интеграторов подвижных целей БИПЦ,
9 - блок поправок координат неподвижных целей БПКНЦ,
10 - блок поправок параметров подвижных целей БПППЦ.
Комплекс работает следующим образом.
В процессе разведывательного полета самолета ПС4 обнаруживает и идентифицирует, например, неподвижную наземную (надводную) цель (или множество таких целей), измеренные координаты этих целей относительно самолета XНСИ = XНС +  (здесь XНС - действительные значения координат,
(здесь XНС - действительные значения координат,  высокочастотная центрированная погрешность) с выхода ПС4 поступают на третий вход БАС5, на первый вход которого с выхода CH1 поступают измеренные координаты местоположения самолета
высокочастотная центрированная погрешность) с выхода ПС4 поступают на третий вход БАС5, на первый вход которого с выхода CH1 поступают измеренные координаты местоположения самолета
где X - действительные значения, Δ = Σaktk - погрешность типа временного ряда K-й степени с постоянными коэффициентами Ak.
С выхода БИНЦ6 на первый вход БПКНЦ9 и на четвертый вход БАС5 поступают корректирующие сигналы yн, yнpb1, ..., yнpn-1bn-1, где b1,..., bn - постоянные коэффициенты, p - оператор дифференцирования.
В БАС5 по поступившим сигналам формируются:
- сигнал измеренного местоположения неподвижной цели (целей)
xни = yн + yнpb1 + ... + yнpn-1bn-1,
- сигнал откорректированных относительных координат
- корректирующий сигнал (при Xн = X + Xнк)
который со второго выхода БАС5 поступает на вход БИНЦ6, где формируются сигналы

(R = 1+b1p + ... + bnpn).
При этом
откуда следует, что при n > k  подбором коэффициентов b1,..., bn высокочастотная погрешность
подбором коэффициентов b1,..., bn высокочастотная погрешность  подавляется до любой близкой к нулю величины, и после окончания переходного процесса
подавляется до любой близкой к нулю величины, и после окончания переходного процесса  = XНС - этот сигнал поступает на первый выход БАС5.
= XНС - этот сигнал поступает на первый выход БАС5.
Сигнал
при оговоренных выше условиях, xн = const, в момент времени tн xни = xн + Δ (tн) - этот сигнал измеренных координат цели с погрешностью Δ (tн) также поступает на первый выход БАС5 (например, последовательно с сигналом 
Сигналы  XНИ с первого выхода БАС5 поступают на первый вход ИОС3 (см. например, книгу [4], В.Г.Гришутина "Лекции по авиационным прицельным системам стрельбы", Киев, КВВАИУ, 1980 г., стр. 356) для индикации экипажу, управления самолетом, оружием, трансляции на взаимодействующие самолеты и наземные пункты управления и разведки.
XНИ с первого выхода БАС5 поступают на первый вход ИОС3 (см. например, книгу [4], В.Г.Гришутина "Лекции по авиационным прицельным системам стрельбы", Киев, КВВАИУ, 1980 г., стр. 356) для индикации экипажу, управления самолетом, оружием, трансляции на взаимодействующие самолеты и наземные пункты управления и разведки.
В процессе дальнейшего полета ПС4 обнаруживает и идентифицирует, например, подвижную наземную (надводную) цель (или множество таких целей); измеренные текущие координаты относительно самолета XПСИ = XПС +  (здесь XПС - точные значения относительных координат подвижной цели,
(здесь XПС - точные значения относительных координат подвижной цели,  - высокочастотная центрированная погрешность), с выхода ПС4 поступают на третий вход БАС5 (например, последовательно с XНСИ), на шестой вход которого с выхода БИПЦ8 поступают корректирующие сигналы yп, yп • pb1, ..., yпpn-1bn-1, поступающие также на третий вход БПППЦ10.
- высокочастотная центрированная погрешность), с выхода ПС4 поступают на третий вход БАС5 (например, последовательно с XНСИ), на шестой вход которого с выхода БИПЦ8 поступают корректирующие сигналы yп, yп • pb1, ..., yпpn-1bn-1, поступающие также на третий вход БПППЦ10.
В БАС5 по поступившим сигнал формируются:
- сигнал местоположения подвижной цели (целей)
xпи = yп + yпpb1 +... + yпpn-1bn-1 = ryп,
- сигнал откорректированных текущих координат
- корректирующий сигнал (при XП = X + XПС)
который с четвертого выхода БАС5 поступает на вход БИПЦ8, где формируются сигналы

(R = 1 + pb1 +pn)bn-1,
при этом
откуда следует, что, например, при Xп = A0+ A1t + A2t2 (движение подвижной цели с ускорением), n > k, n > 2 и при коэффициентах b1,... bn, обеспечивающих подавление  до близких к нулю величин, после окончания переходного процесса
до близких к нулю величин, после окончания переходного процесса  Xпс - этот сигнал поступает на первый выход БАС 5 (например, последовательно с сигналом
Xпс - этот сигнал поступает на первый выход БАС 5 (например, последовательно с сигналом  ).
).
Сигнал
при оговоренных выше условиях в части подавления  n > k, n > 2 в момент времени tп Xпи = xп(tп) + Δ (tп) - этот сигнал измеренных координат подвижной цели с погрешностью Δ (tп) поступает на первый выход БАС5 (например, последовательность с сигналом XНИ). Сигналы
n > k, n > 2 в момент времени tп Xпи = xп(tп) + Δ (tп) - этот сигнал измеренных координат подвижной цели с погрешностью Δ (tп) поступает на первый выход БАС5 (например, последовательность с сигналом XНИ). Сигналы  XПИ с первого выхода БАС5 поступают на первый вход ИОС3 для индикации экипажу, управления самолетом, оружием, трансляции на взаимодействующие самолеты и наземные пункты управления и разведки.
XПИ с первого выхода БАС5 поступают на первый вход ИОС3 для индикации экипажу, управления самолетом, оружием, трансляции на взаимодействующие самолеты и наземные пункты управления и разведки.
В процессе дальнейшего полета ПС4 обнаруживает и идентифицирует наземные неподвижные ориентиры с известными координатами X0, которые с первого выхода ЗКОВ2 поступают на второй вход БАС5. С выхода ПС4 сигналы измеренных относительных координат XОСИ = XОС +  (здесь XОС - действительное значение относительных координат) поступают на третий вход БАС5, на пятый вход которого с выхода БИО7 поступают корректирующие сигналы y0, y0pb1, ..., y0pn-1bn-1, поступающие также на вторые входы БПКНЦ9 и БПППЦ10.
(здесь XОС - действительное значение относительных координат) поступают на третий вход БАС5, на пятый вход которого с выхода БИО7 поступают корректирующие сигналы y0, y0pb1, ..., y0pn-1bn-1, поступающие также на вторые входы БПКНЦ9 и БПППЦ10.
В БАС5 по поступившим сигналам формируются:
- сигнал откорректированного значения координат местоположения самолета
- корректирующий сигнал
который с третьего выхода БАС5 поступает на вход БИО7.
Тогда R = 1 + b1p + ... + bnpn,
R = 1 + b1p + ... + bnpn,
откуда следует, что при n > k
соответственно при подавлении
до величин, близких к нулю  = X, этот сигнал откорректированных координат местоположения самолета поступает на первый выход БАС5, подключенный на первый вход ИОС3 для индикации экипажу, управления самолетом, трансляции на взаимодействующие самолеты и наземные пункты управления.
= X, этот сигнал откорректированных координат местоположения самолета поступает на первый выход БАС5, подключенный на первый вход ИОС3 для индикации экипажу, управления самолетом, трансляции на взаимодействующие самолеты и наземные пункты управления.
На третий вход БПКНЦ9 со второго выхода ЗКОВ2 поступают сигналы времени tн и текущего времени t.
БПКНЦ9 по техническому исполнению является арифметическим устройством, выполняющем операции алгебраического суммирования и умножения (см., например, книгу [5] Преснухина Л.Н., Нестерова П.В. "Цифровые вычислительные машины, Москва, Высшая школа, 1981 г., стр. 329). По поступившим сигналам в БПКНЦ 9 осуществляется формирование компенсирующей поправки δ (tн) и откорректированных координат местоположения цели 
Xни= yн+yнpb1+...+yнpn-1bn-1= Xн+Δ(tн)
(в момент времени tн)
Z0 = y0 + y0pb1 + ... + y0pn-1bn-1 = Δ(t);
z1 = y0pd1 + ... + y0pn-1dn-1 = 
d1 = const, ..., dn-1 = const,
a0(Z0, ..., Zk,t), a1(Z1, ..., Zk,t), ak,
Например, при K = 1,
Δ(t) = a0 + a1t,  a1 = Z1
a1 = Z1
соответственно a0 = Z0 - Z1t;
δ(tн) = a0 + a1tн = z0 - z1 (t-tн);
Сигнал откорректированных координат местоположения неподвижной цели  = XН с выхода БПКНЦ6 поступает на второй вход ИОС3 для индикации экипажу, управления самолетом, оружием и трансляции на наземные пункты управления и разведки.
= XН с выхода БПКНЦ6 поступает на второй вход ИОС3 для индикации экипажу, управления самолетом, оружием и трансляции на наземные пункты управления и разведки.
Со второго выхода ЗКОВ2 сигналы времени tп и текущего времени t поступают на первый вход БПППЦ10, по техническому исполнению являющимся арифметическим устройством ([5], стр. 392), в котором на операциях алгебраического суммирования и умножения формируются компенсирующие поправки  и откорректированные параметры
и откорректированные параметры  подвижной цели - при ее движении с ускорением xп(t) = (A0 + A1t + A2t2):
подвижной цели - при ее движении с ускорением xп(t) = (A0 + A1t + A2t2):
xни(tп) = yпr = xп(tп) + Δ (tп);

z0 = y0 + y0 pb1 + ... + y0pn-1bn-1 = Δ(t),
z1 = y0pd1 + ... + y0pn-1dn-1 = 

(здесь e1, . .., en-1, m1,..., mn-1, d, ..., dn-1 - постоянные коэффициенты),
a0(z0,..., zk, t), a1(z1,..., zk, t),..., ak
δ (tп) = a0 + a1tп+ ...+ aktп k, (tп) = a1 + 2a2tп + ... + ak • k • tп k-1,
(tп) = a1 + 2a2tп + ... + ak • k • tп k-1, (tп) = 2a2 + ... + ak • k•(k-1) tп k-2,
(tп) = 2a2 + ... + ak • k•(k-1) tп k-2,



Сигналы откорректированных параметров подвижной цели  с выхода БПППЦ10 поступают на третий вход ИОС3 для индикации экипажу, управления самолетом, оружием, трансляции на наземные пункты управления и разведки.
с выхода БПППЦ10 поступают на третий вход ИОС3 для индикации экипажу, управления самолетом, оружием, трансляции на наземные пункты управления и разведки.
Таким образом, обеспечивается достижение технического результата - повышение точности определения координат местоположения множества обнаруженных неподвижных целей, параметров движения подвижных целей и, как следствие этого, повышение боевой эффективности применения самолетов в текущей и последующих боевых операциях.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ | 1992 |
|
RU2023984C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1998 |
|
RU2146804C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1998 |
|
RU2145720C1 |
| СИСТЕМА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ТАКТИЧЕСКОЙ ГРУППЫ САМОЛЕТОВ | 1999 |
|
RU2147141C1 |
Изобретение относится к области авиационного приборостроения, в частности к комплексам бортового оборудования самолетов, обеспечивающих определение координат целей. Достигаемый технический результат - повышение точности определения координат неподвижных целей и координат и составляющих скорости подвижных целей - реализуется тем, что в прицельно-навигационный комплекс, содержащий систему навигации, прицельную систему, индикационно-отрабатывающую систему, задатчик координат ориентиров и времени, блок алгебраического суммирования, блок интеграторов неподвижных целей, блок интеграторов ориентиров, блок интеграторов подвижных целей, введены блок поправок координат неподвижных целей и блок поправок параметров подвижных целей. 1 ил.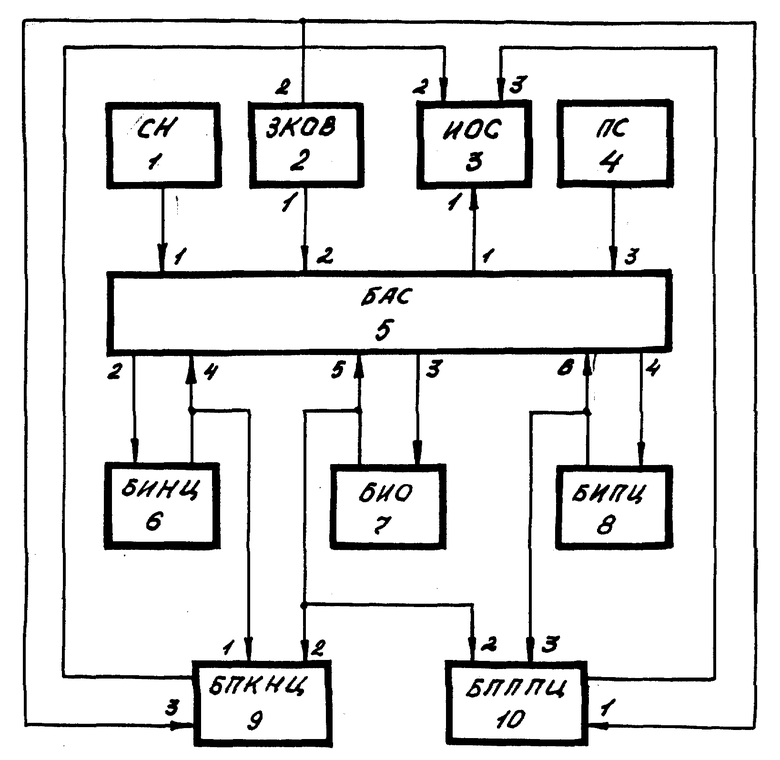
Прицельно-навигационный комплекс, содержащий блок алгебраического суммирования и подключенные выходами к его первому-шестому входам систему навигации, задатчик координат ориентиров и времени, прицельную систему, блок интеграторов неподвижных целей, блок интеграторов ориентиров, блок интеграторов подвижных целей, а также индикационно-отрабатывающую систему, на вход которой подключен первый выход блока алгебраического суммирования, второй, третий и четвертый выходы которого подключены соответственно к входам блока интеграторов неподвижных целей, блока интеграторов ориентиров и блока интеграторов подвижных целей, отличающийся тем, что в него дополнительно введены блок поправок параметров подвижных целей и блок поправок координат неподвижных целей, выход которого подключен к второму входу индикационно-отрабатывающей системы, на третий вход которой подключен выход блока поправок параметров подвижных целей, на первый, второй и третий входы которого подключены соответственно второй выход задатчика координат ориентиров и времени, выход блока интеграторов ориентиров и выход блока интеграторов подвижных целей, а на первый, второй и третий входы блока поправок координат неподвижных целей подключены соответственно выход блока интеграторов неподвижных целей, выход блока интеграторов ориентиров и второй выход задатчика координат ориентиров и времени.
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.485 - 491 | |||
| Мубаракшин Р.Б | |||
| и др | |||
| Прицельные системы стрельбы | |||
| - М.: ВВИА им.Жуковского, 1973, с.299 - 301 | |||
| К.Ф.О'Доннел | |||
| Инерциальная навигация | |||
| - М.: Наука, 1969, с.413 - 421. |

