Изобретение относится к подъемным установкам, а именно к системам автоматического управления электроприводом постоянного тока шахтных подъемных машин, и может быть использовано в системах автоматизации шахтных подъемных установок.
Цель изобретения - повышение точности управления путем снижения динамических нагрузок в подъемных канатах подъемной установки при их противофазных колебаниях.
На чертеже показана схема предлагаемого устройства.
Устройство для управления электроприводом шахтной подъемной машины состоит из последовательно соединенных блока 1 пуска, задатчика 2 программы движения, первого сумматора 3, регулятора 4 скорости, второго сумматора 5, формирователя 6 статических характеристик, ограничителя 7, третьего сумматора 8, регулятора 9 тока якоря двигателя, тиристорного преобразователя 10, датчика 11 тока якоря, выход которого соединен с вторым входом сумматора 8, подъемного двигателя 12. Второй выход формирователя 6 статических характеристик соединен с последовательно соединенными четвертым сумматором 13, регулятором 14 тока возбуждения и тиристорным преобразователем 15. Датчик 16 тока возбуждения соединен с вторым входом сумматора 13 и включен в цепь обмотки 17 возбуждения подъемного двигателя 12. Выходы датчиков 18.1 и 18.2 загрузки, установленных в погрузочном пункте, связаны с первым входом блока 19 выбора направления движения, второй вход которого соединен с вторым выходом блока 1 пуска, а выход - с вторым входом сумматора 5.
Выход датчика 20 скорости барабана подъемной машины соединен с вторым входом первого сумматора 3. Выход блока 21 определения разности перемещений подъемных сосудов соединен через блок 22 формирования сигнала коррекции с третьим входом первого сумматора 3.
Выход блока 23 определения величины противофазных колебаний канатов и подъемных сосудов, который состоит из датчика 23.1 скорости обводного шкива 21.3 и пятого сумматора 23.2, подключен через блок 24 формирования сигнала обратной связи к четвертому входу первого сумматора 3.
На чертеже показаны также контрольные канаты 21.1, натяжное устройство 21.2, обводной шкив 21.3, датчик 21.4 перемещения шкива, барабан 25 подъемной машины, копровые шкивы 26.1 и 26.2, подъемные сосуды 27.1 и 27.2 и подъемные канаты 28.1 и 28.2.
Функция блока 19 заключается в формировании по сигналу пуска ступенчатого сигнала, пропорционального величине загрузки подъемного сосуда и имеющего полярность в зависимости от заданного направления
движения (вперед - плюс, назад - минус). Формирование этого сигнала необходимо для того, чтобы за время растормаживания подъемной машины ток двигателя, а соот- 5 ветственно, и движущийся момент на его валу возросли до величины, необходимой для поддержания груженого сосуда на весу. Блоки 22 и 24 по выполняемым функциям аналогичны, и являются блоками формирования гибких обратных связей контура регу0 лирования скорости. При этом блок 22 формирует сигнал гибкой обратной связи по синфазным колебаниям скорости движения подъемных сосудов, а блок 24 - по противофазным.
5 Функции, реализуемые этими блоками, и, соответственно их структуры и схемы определяются в результате синтеза системы подчиненного регулирования. При этом результат синтеза САР зависит от параметров конкретной подъемной установки (глубина шах0 ты, мощность подъемной машины, вид органа навивки, массы вращающихся частей и т. п.). В каждом конкретном случае структуры и схемы блоков различные.
Учитывая то, что датчик 23.1 формирует сигнал, пропорциональный скорости вращения щкива 21.3, а следовательно, и скорости движения подъемных сосудов, и то, что сигнал с блока 24 поступает на вход первого сумматора 3, блок 24 может представлять собой обычный усилитель постоянного тока
Q с коэффициентом усиления, определяемым для конкретной подъемной установки.
На вход блока 22 с датчика 21.4 поступает сигнал, пропорциональный синфазным колебаниям перемещения подъемных сосудов. Учитывая, что сигнал, поступающий
5 на вход сумматора 3 регулятора 4 скорости с выхода блока 22 должен иметь размерность скорости, то блок 22 может представлять собой дифференцирующее звено (скорость является производной от перемещения). Устройство работает следующим образом.
0 С выхода блока 1 подается сигнал начала движения. Задатчик 2 программы движения начинает формировать программу движения подъемного сосуда в функции времени. Одновременно с входным сигналом на вход
с блока 19 поступает сигнал с датчиков 18 загрузки, и на выходе блока 19 формируется сигнал, полярность которого определяется заданным направлением движения, а величина - приложенным статическим моментом. При поступлении указанного ступенча0 того сигнала на вход сумматора 5 формирователя 6 статических характеристик на его выходах формируются сигналы управления током якоря и током возбуждения. В результате этого происходит нарастание тока возбуждения и тока якоря подъемного двига5 теля, а следовательно, и нарастание момента ограничивается только постоянными времени регуляторов тока якоря 9 и тока возбуждения 14. Время нарастания момента меньше
времени растормаживания подъемной машины, поэтому происходит подхватывание груза, а просадки подъемного сосуда не происходит. Рывок в устройстве также исключается, так как контур регулирования скорости поддерживает скорость всегда на заданном уровне, начиная с нуля.
В дальнейшем на разгон и замедление подъемной машины ступенчатый сигнал не влияет, так при выходе из зоны действия датчиков 18 загрузки он снимается, а регулятор 4 скорости поддерживает величину скорости на уровне, который задается задат- чиком 2 программы движения. При допущении отсутствия упругости подъемных канатов во время работы подъемной уста- новки линейные перемеш.ения обоих сосудов относительно точки начала их движения равны, следовательно, длина набегаюпдей на обводной шкив 21.3 ветви контрольного каната 21.1 строго равна длине сбегаюшей ветви и поэтому обводной шкив 21.3 удержи- вается в одном и том же положении по вертикали. В реальной системе канат обладает упругими свойствами, в связи с чем обводной шкив испытывает постоянные перемещения по вертикальной оси, величина кото- рых зависит от вытяжки грузовых канатов. Пружинное натяжное устройство 21.2 обеспечивает необходимый ход шкива при требуемом натяжении контрольных канатов. Перемещения обводного шкива 21.3 вызывают перемещение подвижной части, например индуктивного датчика 21.4 который, дает на выходе знакопеременное постоянное напряжение, величина которого пропорциональна этому перемещению, а знак определяется направлением движения шкива относительно своего исходного положения. Сигнал с датчика 21.4 поступает на вход блока 22, который содержит динамические звенья и формирует требуемый для каждого конкретного привода и установки свой закон изменения сигнала обратной связи. Далее сигнал поступает на вход первого сумматора 3, регулятора 4 скорости, обрабатывается он и системой регулирования в целом, в результате чего двигатель 12 вырабатывает момент стремящийся погасить колебания подъемных канатов 28.1 и 28.2 и тем самым устранить вертикальные перемещения обводного шкива 21.3.
При колебаниях подъемных канатов и сосудов возникает такой режим, когда, предположим, сначала канат 28.1 сжимается, а канат 28.2 растягивается, затем наоборот, т. е. появляются противофазные колебания канатов. В этом случае перемещения подъемных сосудов относительно своего исходного положения в каждый момент времени могут быть одинаковыми и поэтому верти- кальные перемещения обводного щкива отсутствуют. Следовательно, не действует и обратная связь, направленная на устранение
разности в перемещениях подъемных сосудов. Однако противофазные колебания подъемных канатов и сосудов в данном режиме устраняются по цепи обратной связи через блоки 23 и 24. Это осуществляется следующим образом.
Датчик скорости 23.1 обводного щкива 21.3 при работе подъемного барабана 25 выдает сигнал, который суммируется с обратным знаком на блоке 23.2 с сигналом датчика 20 скорости барабана 25 подъемной машины. Когда скорости вращения обводного шкива 21.3 и барабана 25 одинаковые, то на выходе блока 23.2 напряжение равно нулю, а при появлении противофазных колебаний подъемных сосудов 27.1 и 27.2 возникает знакопеременное напряжение, которое, проходя через блок 24 формирования сигнала обратной связи, подается на вход регулятора скорости и затем им отрабатывается. В результате этого напряжение, подаваемое на двигатель, а значит, и скорость двигателя изменяются таким образом, что противофазные колебания канатов уменьшаются. Введение в известное устройство блока 23 определения величины противофазных колебаний канатов и сосудов, а также заведение с его выхода через блок 24 обратной связи на вход регулятора 4 скорости позволяет снизить противофазные колебания подъемных сосудов и канатов, а следовательно, уменьшить динамические нагрузки в подъемных канатах, повысить точность и надежность управления шахтной подъемной машиной, позволяет снизить величину суммарных нагрузок на канат, определяемых противофазными колебаниями канатов в зависимости от типа подъемной установки в пределах от I до 2%.
Формула изобретения
Устройство для управления электроприводом шахтной подъемной машины, содержащее блок пуска, задатчик программы двигателя, первый сумматор, регулятор скорости, второй сумматор, формирователь статических характеристик, ограничитель, третий сумматор, регулятор тока, тиристор- ный преобразователь тока якоря электродвигателя, соединенные последовательно, датчик тока якоря электродвигателя, выход которого подключен к второму входу третьего сумматора, подъемный электродвигатель, второй выход формирователя статических характеристик через четвертый сумматор и регулятор тока возбуждения подключен к тиристорному преобразователю тока возбуждения, при этом выход датчика тока возбуждения подключен к второму входу четвертого сумматора, два датчика загрузки подъемных сосудов, выходы которых подключены к первому входу блока выбора направления двигателя, к второму входу которого подключен второй выход блока пуска.
а выход блока выбора направления двигателя подключен к второму входу второго сумматора, блок определения разности перемещений подъемных сосудов, выход которого через блок формирования статических характеристик подключ.ен к третьему входу первого сумматора, датчик скорости барабана подъемной машины, выход которого подключен к второму входу первого сумматора, отличающееся тем, что, с целью повышения точности управления путем снижения динамических нагрузок в подъемных канатах при их противофазных колебаниях, оно снаб
жено блоком определения величины противофазных колебаний канатов и подъемных сосудов, содержащим датчик скорости обводного шкива и пятый сумматор, и блоком формирования сигнала обратной связи, при этом выход датчика скорости обводного щкива подключен к первому входу пятого сумматора, к второму входу которого подключен выход датчика скорости барабана подъемной машины, а выход пятого сумматора через блок формирования сигнала обратной связи подключен к четвертому входу первого сумматора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1237593A2 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2031830C1 |
| Устройство позиционного управления электроприводом подъемной машины | 1979 |
|
SU906886A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Устройство для измерения натяжения канатов многоканатной подъемной установки | 1983 |
|
SU1105435A1 |
Изобретение относится к автоматическому управлению электроприводом шахтных подъемных машин. Цель - повышение точности управления путем снижения динамических нагрузок в подъемных канатах подъемной установки при их противофазных колебаниях (ПФК). Для этого устр-во снабжено блоком 23 определения величины ПФК канатов и подъемных сосудов (ПС) и блоком 24 формирования сигнала обратной связи. Блок 23 состоит из датчика 23.1 скорости обводного шкива 21.3 и сумматора 23.2. Выход датчика 23.1 подключен к первому входу сумматора 23.2, к второму входу которого подключен выход датчика 20 скорости барабана подъемной машины. Выход сумматора 23.2 через блок 24 подключен к одному из входов сумматора 3. К другим входам сумматора 3 подключены выходы задатчи- ка 2 программы движения, датчика 20 и блока 21 определения разности перемещений ПС 27.1 и 27.2 через блок 22 формирования сигнала коррекции. Выход блока сравнения соединен с входом регулятора 4 скорости. По сигналу пуска блоком 19 формируется ступенчатый сигнал, пропорциональный величине загрузки ПС и имеющий полярность в зависимости от заданного направления движения. Блок 22 формирует сигнал гибкой обратной связи по синфазным колебаниям скорости движения ПС, а блок 24 - по противофазным. При появлении ПФК канатов и ПС 27.1 и 27.2 возникает знакопеременное напряжение, которое, проходя через блок 24, подается на вход регулятора 4 и отрабатывается им. Напряжение, подаваемое на двигатель 12, а значит, и его скорость, изменяются т. обр., что ПФК канатов уменьшаются. 1 ил. (Л ос 00 00 00 rff.Z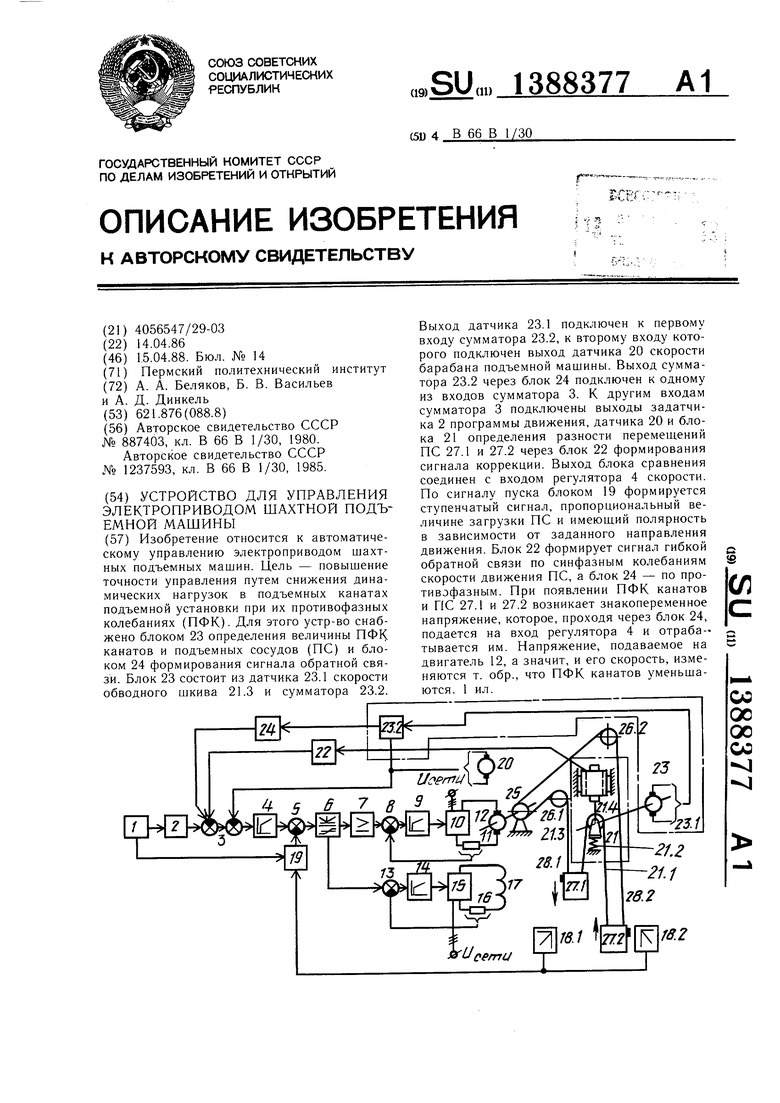

| Устройство для управления электроприводом шахтной подъемной машины | 1980 |
|
SU887403A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1237593A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
