Изобретение относится к станкостроению, в частности к зубодолбежным станкам.
Цель изобретения - расширение технологических возможностей за счет обработки зубчатых колес с винтовым зубом.
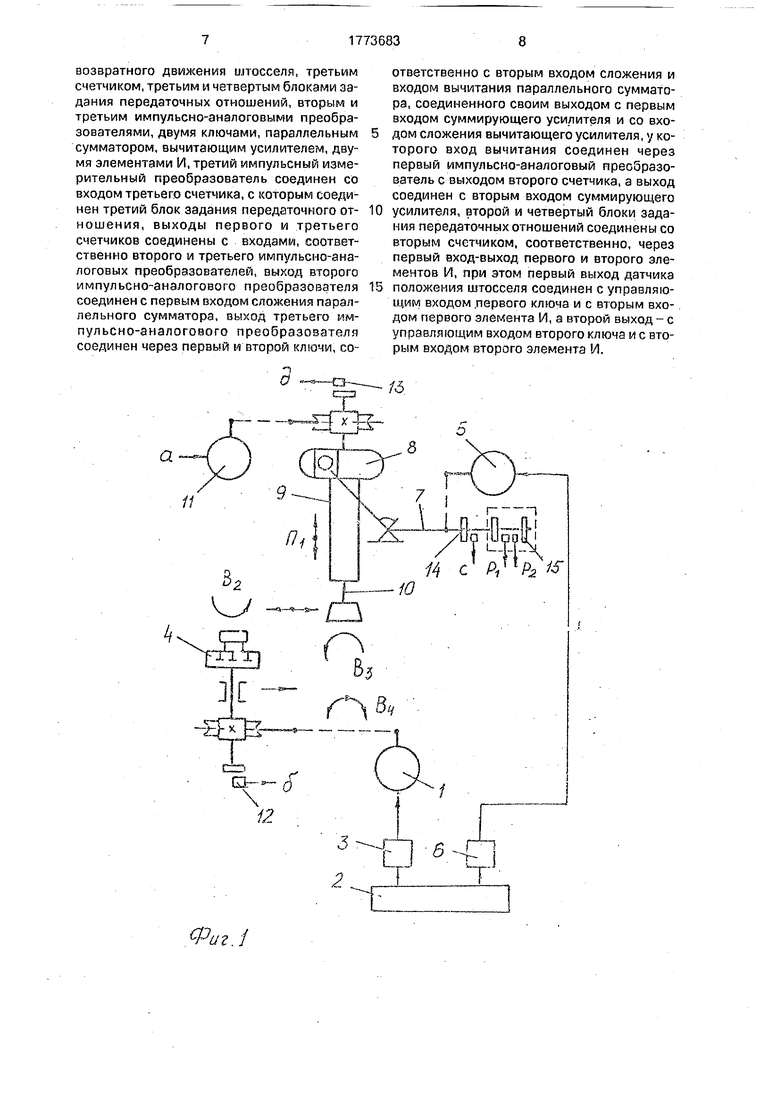
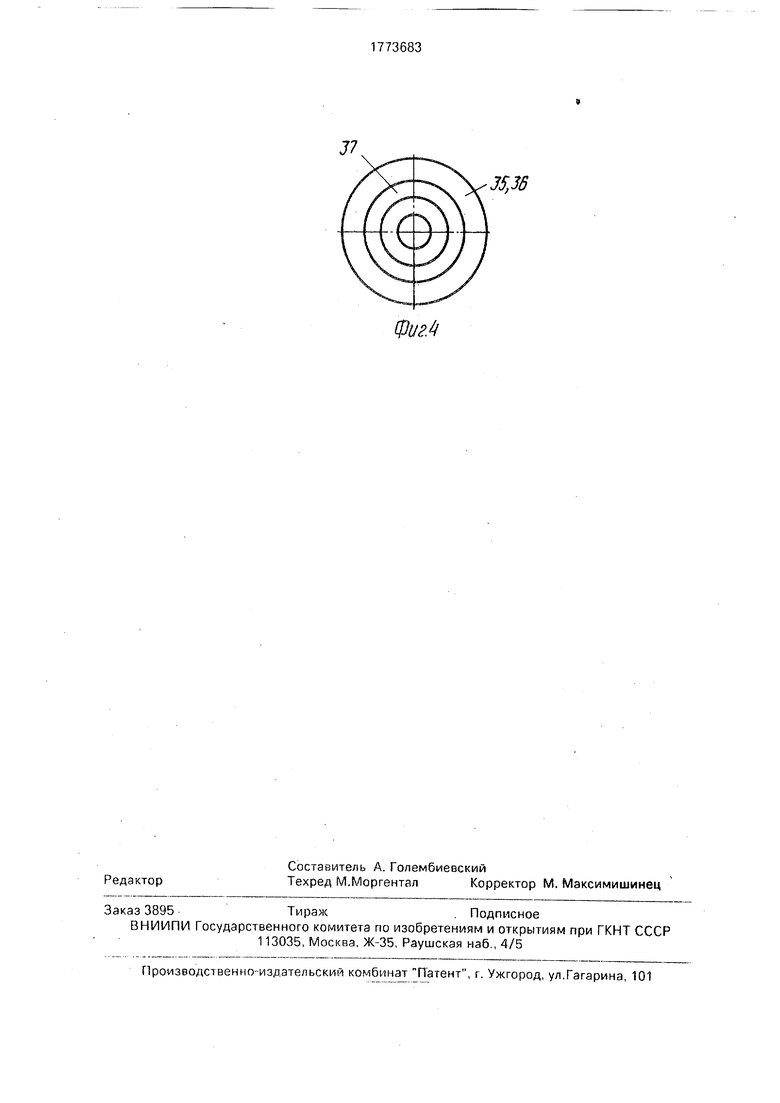
На фиг.1 приведена схема приводов станка; на фиг.2 - блок для формирования сигнала управления приводом вращения штосселя; на фиг.З - схема датчика положения, штосселя; на фиг.4 - схема маски датчика положения.
Электродвигатель 1 первой задающей координаты, получающий энергию от задат- чика устройства ЧПУ 2 через усилитель 3 мощности кинематически связан с делительным столом 4. Электродвигатель 5 втрой задающей координаты, получающий энергию от задатчика устройства ЧПУ 2 через усилитель 6 мощности, кинематически связан с приводным валом 7, являющимся ведущим звеном кулисного механизма 8 привода поступательно-возвратного движения гильзы 9, в которой установлен с возможностью вращения штоссель 10 долбяка, Штоссель 10 является ведомой координатой
в обоих сложных движениях: обкатном, состоящем из согласованных движений В 2 делительного стола 4 и Вз штогселя 10, и винтовом, состоящем из согласованных поступательно-возвратного движения ГЬ гильзы 9 и вращательно-возвратного движения В4 штосселя 10.
Блок для формирования сигнала управления электродвигателем 11 привода вращения штосселя 10 включает первый 12, второй 13, третий 14 импульсные измерительные преобразовсэтели, установленные соответственно на делительном столе 4, штосселе 10, приводном валу 7, и датчик 15 положения илосселя, установленный на приводном валу 7. Импульсные измерительные преобразователи 12, 3, 14 соединены соответственно с первым 16 вторым 17, третьим 18 счетчиками Спэрвым 16 и третьим 18 счетчиками соединены соответственно первый 19 и третий 20 бпоки задания передаточных отношений. С вторым счетчиком 17 соединен выход элемента ИЛИ 21, входы которого соединены г ыхолзми первого 22 и второго 23 элементов И Первые
;(/)
L
(L™,
СО
входы элементов И 22, 3 сосгщнаьы г, вторым 24 и четвертым 25 Ыокзмп задания передаточных отношений соотзетстиемно. Второй вход первого элемент И 22 соединен с первым выходом датчика 15 попоже- нил штосселя, а вюрой вход второго элемента И 23 - с вторым вь-хо/юм зтого датчика.
Функционально счетчик с соответствующим блоком задания передаточною отношения является оегулируеимм делителем частоты. Выходы первого 16, cinpujo 17, третьего 18 счег-i и ко в сослано: -1 coorr f Tfj- венно с первым 26, GT Tt етш/ -у; ъ
ИМПулЬСИО-гШр- ПЮЧ Г П ЧРОГ,|,.ЧГ,.ЧО(5 г
ми. Выход neptif I rt i° inwioi S-TI ;r, преобразовал слп ,( wv.,, м читания вычитающего 2м второго импульсно упяло н. np -obpa; . вате/т 27 соед чмем с пеон; IM «ходом спохе- ния параллельно о суммаглрл 30 гчыход третьего импулыно- прлогоропэ прпобрз зователя 28 соединен мере аналоговые вход-выход перг-огп 31 м eroooiu 3 ключей соответственно с отопим хпп,пм ою/генил и входом параллельною сумма тора 30. Управлч ош сСпотепчм ги- -) - ходы ключей 1 мн„
.ТСТВОННП t .ЮР-Ч Н rt т.Н)ЫП Dt чО/ Ами датчика Ь пилохоч 1 нл г-еля
Выход naDP iJtcv. rS(i«o r jp- Ч) u единен с пчпдсм si i i 1 пт.|цсго усилителя 29 и г первым рхсиу1 .щлпую щего усилителя 33. В t опой г/од i. ° ш,егй усилителя 33 соплпнеп а ходом вычитающего усилигелч 0, fs ,м ,ход через усилитель 3 мощности г.оеди -sen с зпект родвигателем 11 привода ррзшпшя UJTOC- селя 0.
Датчик 15 положения шюсселя выполнен с чидо дву/ одииакппых дисков 36 и 36 с фотоэлектричес.ой неской 37 пэ одной полозине окружности нэ горце диск. На обшей оси 38 диски 35 и 36 установлены в противофазе, т.е. смещены относительно друг друга на 180°, С одной скорояы дисков установлены освенпели 39 и 40, а с другой - фоторезисшры 4i u A2, соединенные с электронным блоком последовательно соединенные с фогорези- стором 41 усилитель 43, выпрямитель 44, фильтр 45 и последоЕ тель о соединенные с фоторезмстором 42 усилитель 40, выпрямитель 47, фмяьто 48,
В качестве электродвигателей 1, И, 11
ИСПОЛЬЗУЮТСЯ ПЫСОКОМО е ТЦ й ЛЧШПЧЫ
постоянного тока позволяющие of унсс йЛЯТЬ 083СГуПО П- ОС рОГУ 1 ОЧаИМ8 i)yfOоой частоты,
При настройке станка круговая подача штпсселп 10 в движении обката - согласованных вращениях Bz делительного стола 4
и Вз штосселя - устанавливается блоком 19, а круговая подача штосселя 10 в винтовом движении - согласованные поступательно- возвратное движение Пч гильзы 9 и враща- тельно-возвратное движение штосселя 0 устанавливается блоком 20.
Ведомая координата, штоссель 10, одновременно участвует в двух сложных движениях - обкатном и винтовом. При этом при рабочем ходе круговые подачи в движе 5 Н1 1С5 Вз и В4 складываются, а при свободном ходе - вычитаются. Поэтому передаточное отношение функциональных связей ведомой координаты с задающими рабочем ходе устанавливается посредU иым второго блока 20 задания передаточного отношения, а при свободном ходе - посредством четвертого блока 25 задания передаточного отношения. При этом коэф- «Ьициенгы деления, задаваемые блоками 19
5 и 20 задания передаточного отношения для обоиуходов, одинаковы.
Станок работает следующим образом. При включении электродвигателей 1 и 5 обеих .задающих координат получает посту0 пательчо-возвратное движение fli гильза 9 штосселя Ш, несущего долбяк, и вращательное движение Ва делительный стол 4 с заготовкой, Одновременно первый 12 и третий 14 импульсные измерительные преобразоS ватели и датчик 15 положения штосселя вырабатывают высокочастотные сигналы.
Вырабатываемый импульсным измерительным преобразователем 12 высокочастотный сигнал поступает в первый счетчик
0 16, где он делится посредством сигнала, поступающего из первого блока 19 задания передаточного отношения. Вырабатываемый импульсным измерительным преобразователем 14 высокочастотный сигнал
5 поступает в третий счетчик 18, где происходит его деление посредством сигнала от третьего блока 20 задания передаточного отношения.
0 Результирующие сигналы с первого 16 и третьего 18 счетчиков поступают соответственно во второй 27 и третий 28 импульс- мо-анппоговые преобразователи, в которых происходит преобразование высокочастот5 ного сигнала в напряжение, пропорциональное частоте.
Аналоговый сигнал с выхода второго им- пульско-аиалогового преобразователя 27 поступает на первый вход сложения параллельного сумматора 30, а аналоговый сигнал с в ч хода третьего импульсно-аналогового
преобразователя 28 - на аналоговые входы первого 31 и второго 32 ключей.
Одновременно следующим образом формируются управляющие потенциалы Pi и Р2 для управления переключениями в схеме.
На фоторезисторе 41 образуется высокочастотный синусоидальный сигнал под воздействием светового потока, проходящего через фотоэлектрическую маску диска 35 от осветителя 39 только в течение половины оборота приводного вала 7, соответствующий перемещению гильзы 9 со штосселем 10 в одну стррону в движении П t, например из крайней верхней точки положения долбяка в крайнюю нижнюю. При движении гильзы 9 в противоположную сторону аналогичный сигнал образуется на фоторезисторе 42. Сигналы с фоторезисторов 41 и 42 поступают в электронный блок, где они усиливаются соответственно усилителями 43 и 46 и преобразуются в выпрямителях 44 и 47 и фильтрах 45 и 48 в управляющие потенциалы Pi и Р2 длительностью, соответствующей длине пути долбяка.
Управляющие потенциалы поступают на потенциальные входы ключей 31 и 32, открывая их по очереди для прохождения аналогового сигнала с импульсно-аналого- вого преобразователя 28. В результате при рабочем.ходе штосселя 10 в движении ГН аналоговый сигнал поступает на второй вход сложения параллельного сумматора 30. а при свободном (обратном) ходе штос- селя этот сигнал поступает на вход вычитания параллельного сумматора 30.
С выхода параллельного сумматора 30 на первый вход суммирующего усилителя 33 поступает результирующий сигнал, соответствующий при рабочем ходе штосселя 10 в движении ГИ сумме, а при свободном ходе - разности сигналов, действующих на входах параллельного сумматора.
Сигнал с выхода суммирующего усилителя 33 через усилитель 34 мощности сообщается электродвигателю 11 привода вращения штосселя 10. В результате при рабочем ходе круговая подача штоссеяя 10 долбяка соответствует сумме движений Вз и В4, а при свободном ходе круговая подача соответствует разности этих движений.
Таким образом, осуществляется отслеживание движения ведомой координаты, штосселя 10, синхронно движениям обеих ведущих координат. Это соответствует образованию профиля и линии зуба винтового (косозубого) колеса.
Одновременно из-за девиации скорости движения в механических передачах ведомой координаты осуществляется автоподстройка ее движения. Для этого следующим образом вырабатывается сигнал 5 коррекции, который сообщается на второй вход суммирующего усилителя 33.
Одновременно с сообщением штоссёлю 10 вращательного движения второй импульсный измерительный преобразователь 13 10 вырабатывает высокочастотный сигнал, который поступает во второй счетчик 17. В этом счетчике происходит деление сигнала в соответствии с заданным коэффициентом на втором 24 и четвертом 25 блоках задания 15 передаточных отношений, подключаемых через соответственно элемент И 22 и элемент И 23 посредством управляющих потенциалов Pi и Р2 соответственно при рабочем и свободном ходе долбяка. В результате на 0 выходе счетчика 17 образуется сигнал, соответствующий действительной скорости вращения штосселя 10 при рабочем и свободном ходе. Этот сигнал после преобразования в аналоговую форму в первом 5 импульсно-аналоговом преобразователе 26 поступает на вход вычитания вычитающего усилителя 29. На вход сложения этого усилителя поступает сигнал с выхода параллельного сумматора 30.
0 Образующийся на выходе вычитающего усилителя разностный сигнал в качестве сигнала коррекции поступает на втррой вход суммирующего усилителя 33, где происходит коррекция задающего сигнала уп- 5 равления ведомой координаты.
Формула изобретения Устройство управления зубодолбежным станком, содержащим привод вращения делительного стола и привод поступательно- 0 возвратного движения штосселя, включающее блок для формирования сигнала управления приводом вращения штосселя, выполненный в виде первого и второго импульсных измерительных преобразова- 5 телей, установленных на делительном столе и штосселе и соединенных с входами, соответственно первого и второго счетчиков, с которыми соединены соответственно, первый и второй блоки задания передаточных 0 отношений, первый импульсно-аналоговый преобразователь и суммирующий усилитель, соединенный своим выходом через усилитель мощности с электродвигателем привода вращения штосселя, отличаю- 5 щ е е с я тем, что, с целью расширения технологических возможностей за счет об- . работки зубчатых колес с винтовым зубом, устройство снабжено третьим импульсным измерительным преобразователем и датчиком положения штосселя, установленными на приводном валу привода поступательновозвратного движения штосселя, третьим счетчиком, третьим и четвертым блоками задания передаточных отношений, вторым и третьим импульсно-аналоговыми преобразователями, двумя ключами, параллельным сумматором, вычитающим усилителем, двумя элементами И, третий импульсный измерительный преобразователь соединен со входом третьего счетчика, с которым соединен третий блок задания передаточного отношения, выходы первого и третьего счетчиков соединены с входами, соответственно второго м третьего импульсно-ана- логовых преобразователей, выход второго импульсно-аналогового преобразователя соединен с первым входом сложения параллельного сумматора, выход третьего импульсно-аналогового преобразователя соединен через первый и второй ключи, соответственно с вторым входом сложения и входом вычитания параллельного сумматора, соединенного своим выходом с первым входом суммирующего усилителя и со входом сложения вычитающего усилителя, у которого вход вычитания соединен через первый импульсно-аналоговый преобразователь с выходом второго счетчика, а выход соединен с вторым входом суммирующего
усилителя, второй и четвертый блоки задания передаточных отношений соединены со вторым счетчиком, соответственно, через первый вход-выход первого и второго элементов И, при этом первый выход датчика
положения штосселя соединен с управляющим входом .первого ключа и с вторым входом первого элемента И, а второй выход - с управляющим входом второго ключа и с вторым входом второго элемента И.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синхронизации приводов врезания и профилирования зубодолбежного станка | 1986 |
|
SU1371862A1 |
| Устройство для синхронизации приводов врезания и профилирования зубодолбежного станка | 1988 |
|
SU1565649A2 |
| Зубодолбежный станок | 1985 |
|
SU1273217A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗУБОДОЛБЕЖНЫМ СТАНКОМ С ЧПУ | 1988 |
|
RU2023551C1 |
| Зубодолбежный станок | 1990 |
|
SU1734984A1 |
| Устройство для синхронизации приводов зубодолбежного станка | 1986 |
|
SU1328156A1 |
| Зубодолбежный станок с ЧПУ | 1986 |
|
SU1366360A1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 1991 |
|
RU2025233C1 |
| Зубодолбежный станок для обработки некруглых колес | 1985 |
|
SU1303301A1 |
| Роторный зубодолбежный станок с ЧПУ | 1989 |
|
SU1779542A1 |

Использование: в станкостроении. Сущность: дополнительно введена в устройство синхронизации станка функциональная связь, обеспечивающая линию зуба под углом к оси колеса. Связь состоит из измерительного преобразователя, датчика положения штосселя, установленных на приводном валу штосселя, счетчика, двух блоков задания передаточных отношений, двух ЦАП, двух ключей, параллельного сумматора, вычитающего усилителя и двух элементов И. 4 ил.
9
ОоГг г
Mw.™.-V-«ямнтыя 1 Т
-JN7
к, .
/7,
Фиг.1
7
к, .,;л
(Ј-™™Dm™,J -i™-- &---V Ь -Пи
: /Ш ШшЦ i
ц с Р/ р/#
2b 22
зъ
3539
®
1773683
16 18 20 J ±f
Фиг. 2
38
Ж
r
0-
40
43
46
Фиг.З
f I.
11
4
35,36
Фиг4
| Зубодолбежный станок | 1985 |
|
SU1273217A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
