Изобретение относится к области станкостроения и может быть использовано для управления приводами подач двух исполнительных органов равнозначных ведущих координат зубообрабатывающих станков, например зубодолбежных, для одновременной обработки двух зубчатых колес одним долбяком на двух делительных столах.
Известно устройство управления, содержащее задатчик, соединенный через первый и второй усилители мощности соответственно с первым и вторым регулируемыми электродвигателями, кинематически связанными посредством редукторов с первым и вторым исполнительными органами, на которых установлены соответственно первый и второй импульсные измерительные преобразователи.
Цель изобретения - повышение точности получаемых зубчатых колес за счет обеспечения одинаковых условий обработки на обоих исполнительных органах.
Цель изобретения - создание способа управления приводами подач двух исполнительных органов равнозначных ведущих координат зубодолбежных станков, который обеспечил бы одинаковые условия обработки зубчатых колес одновременно на двух исполнительных органах (столах) одним долбяком.
На фиг. 1 приведена блок-схема устройства управления приводами подач; на фиг. 2 - временная диаграмма.
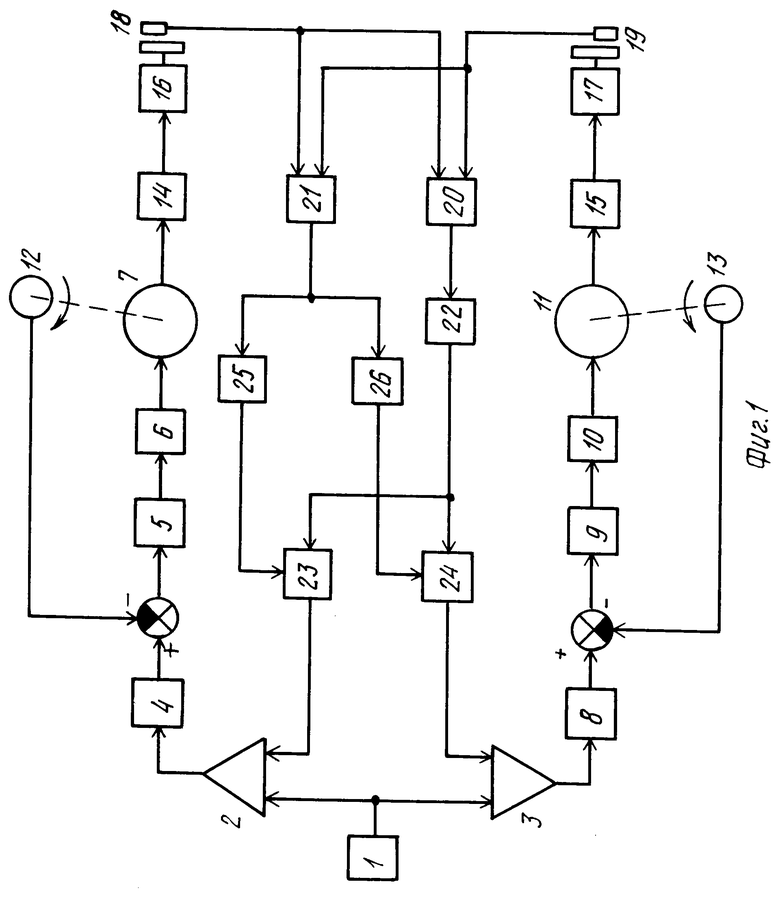
Для управления приводами подач задающий сигнал формируется в задатчике 1 в виде напряжения. В качестве задатчика в современных управляемых приводах станков используется источник питания со ступенчатым изменением выходного напряжения. Задатчик 1 соединен с входами сложения первого 2 и второго 3 вычитателей. Выход вычитателя 2 через последовательно соединенные первый регулятор положения 4, первый регулятор скорости 5 и первый усилитель мощности 6 соединен с первым управляющим электродвигателем 7. Выход вычитателя 3 через последовательно соединенные второй регулятор положения 8, второй регулятор скорости 9 и второй усилитель мощности 10 соединен с вторым управляемым электродвигателем 11. В электродвигатели 7 и 11 встроены тахогенераторы 12 и 13, являющиеся датчиками обратной связи по скорости. Выходы тахогенераторов 12 и 13 соединены с входами регуляторов скорости 5 и 9. В качестве регуляторов положения 4 и 8 используются П-регуляторы, а в качестве регулятора скорости используются ПИ-регуляторы.
Возможны также другие контуры регулирования, например, по току якоря. В этом случае регулятор тока размещают между регулятором скорости и усилителем мощности.
Электродвигатели 7 и 11 посредством редукторов 14 и 15 кинематически связаны с первым 16 и вторым 17 исполнительными органами двух разнозначных координат. На исполнительных органах 16 и 17 установлены соответственно первый 18 и второй 19 импульсные измерительные преобразователи. Выход импульсного измерительного преобразователя 18 соединен с первыми входами фазового 20 и знакового 21 дискриминаторов. Выход импульсного измерительного преобразователя 19 соединен с вторыми входами дискриминаторов 20 и 21. Выход фазового дискриминатора 20 соединен с входом импульсно-аналогового преобразователя 22, соединенного своим выходом с аналоговыми входами первого 23 и второго 24 ключей, управляемых положительным потенциалом. Выход знакового дискриминатора 21 соединен с входом инвертора 25 и с входом повторителя 26. Выход инвертора 25 соединен с управляющим входом первого ключа 23, а выход повторителя 26 - с управляющим входом второго ключа 24. Выходы первого 23 и второго 24 ключей соединены с вторыми входами первого 2 и второго 3 вычитателей соответственно.
Способ управления осуществляется следующим образом.
Задающий сигнал с выхода задатчика 1 одновременно поступает через вход сложения - выход вычитателей 2 и 3, регуляторы положения 4 и 8, регуляторы скорости 5 и 9, усилители мощности 6 и 10 на электродвигатели 7 и 11, получающие вращательное движение с круговой частотой, определяемой задающим сигналом.
Круговые частоты электродвигателей раздельно за счет отрицательных обратных связей по скорости тахогенератор - регулятор скорости автоматически регулируются. Электродвигатели 7 и 11 через редукторы 14 и 15 сообщают движение исполнительным органам 16 и 17.
Действительные скорости и мгновенные положения обоих исполнительных органов различаются из-за различных условий трения в парах трения и различной жесткости механических систем обоих исполнительных органов. Поэтому одновременно формируется сигнал, пропорциональный разности действительных скоростей исполнительных органов для коррекции синфазности их перемещения.
Импульсные измерительные преобразователи 18 и 19 вырабатывают импульсные сигналы - аналоги действительных скоростей исполнительных органов 16 и 17 соответственно. Сигналы с этих преобразователей поступают на входы фазового 20 и знакового 21 дискриминаторов для сравнения. На выходе фазового дискриминатора образуется импульсный сигнал, пропорциональный абсолютной разности положений или действительных скоростей исполнительных органов. Этот сигнал после преобразования в аналоговую форму в импульсно-аналоговом преобразователе 22 поступает на аналоговые входы ключей 23 и 24.
На выходе знакового дискриминатора 21 образуется сигнал "-" при отставании второго исполнительного органа 17 или сигнал "+" при отставании первого исполнительного органа 16.
Знаковый сигнал с выхода знакового дискриминатора 21; повторяется по знаку на выходе повторителя 26 и параллельно инвертируется на выходе инвертора 25. В результате на управляющих входах первого 23 и второго 24 ключей действуют противоположные по знаку сигналы. При этом открывается ключ, на управляющий вход которого поступает положительный потенциал. Например, при отставании второго исполнительного органа 17 открывается первый ключ 23. Через этот ключ на вход вычитания первого вычитателя 2 проходит сигнал, пропорциональный разности действительных скоростей обоих исполнительных органов. В итоге на выходе первого вычитателя 2 задающий сигнал уменьшается и пропорционально уменьшается скорость первого исполнительного органа. При изменении знака на выходе знакового дискриминатора 21 аналогично изменяется скорость второго исполнительного органа.
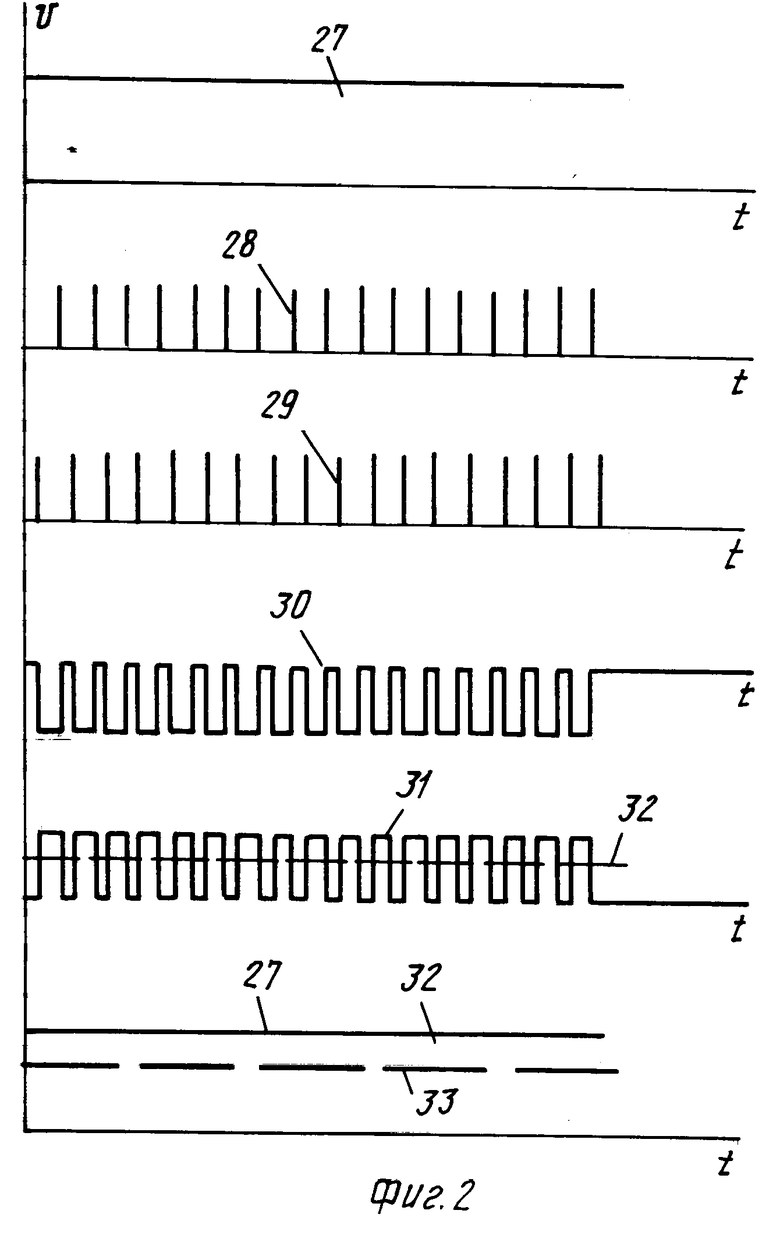
П р и м е р. Для управления приводами подач двух продольных столов, являющихся равнозначными ведущими координатами зубодолбежного станка с касательным врезанием, на котором одним долбяком осуществляют обработку одновременно на двух столах, с задатчика 1 сообщается задающий сигнал 27 (фиг. 2), пропорциональный подаче, например, равной 0,2 мм/двойной ход, одновременно через входы сложения вычитателей на оба привода. Сигналы 28 и 29, соответствующие действительным скоростям или положениям первого и второго исполнительных органов, показывают отставание второго из них. Это отставание в знаковом дискриминаторе преобразуется в потенциальный сигнал 30 со знаком "-", а в фазовом дискриминаторе - в последовательность импульсов 31, пропорциональную абсолютной величине отставания, которая преобразуется в аналоговый сигнал 32 в импульсно-аналоговом преобразователе, пропорциональный частоте.
Знаковый сигнал 30 после инвертирования открывает первый ключ. В итоге через этот ключ на вход вычитания первого вычитателя проходит сигнал 32, где происходит его вычитание из задающего сигнала 27 (результирующий сигнал 33). Следствием этого является пропорциональное замедление скорости первого исполнительного органа и выравнивание его перемещения (мгновенного положения) с перемещением второго исполнительного органа.
При отставании первого исполнительного органа на выходе знакового дискриминатора изменяется знак выходного сигнала на противоположный, и происходит вычитание сигнала 32 из задающего сигнала 27 во втором вычитателе. В итоге замедляется движение второго исполнительного органа и выравнивание его перемещения с перемещением первого исполнительного органа.
Таким образом, заявляемое изобретение обеспечивает синфазность перемещений двух равнозначных исполнительных органов равнозначных ведущих координат в зубодолбежном станке.
Заявляемое изобретение по сравнению с прототипом обеспечиваeт повышение точности согласованного (синфазного) перемещения двух равнозначных по условиям работы в зубодолбежных станках исполнительных органов. Следствием этого является повышение точности получаемых зубчатых колес. Обеспечивается это тем, что в процессе работы осуществляется непрерывная коррекция общего задающего сигнала, сообщаемого обоим исполнительным органам, для того исполнительного органа, который опережает в движении. В итоге устраняется рассогласованность по положению обоих исполнительных органов, вызываемое в прототипе неодинаковыми условиями трения и неодинаковой жесткостью механических систем обоих исполнительных органов.
Использование: для управления приводами подач двух исполнительных органов, равнозначных по условиям работы в зубодолбежных станках. Для обеспечения одинаковых условий обработки на обоих исполнительных органах фазовый дискриминатор непрерывно формирует сигнал, пропорциональный разности действительных положений обоих исполнительных органов, который в импульсно-аналоговом преобразователе преобразуется в аналоговую форму и подается на аналоговые входы ключей. Знаковый дискриминатор одновременно определяет знак отставания, т.е. определяет, какой из исполнительных органов движется с отставанием, а какой - с опережением. Этот сигнал после прохождения инвертора и повторителя поступает на управляющие входы ключей с противоположными знаками. В результате на вход вычитания второго вычитателя через второй ключ поступает сигнал с импульсно-аналогового преобразователя при опережении второго исполнительного органа. При опережении первого исполнительного органа этот сигнал поступает через первый ключ на вход вычитания первого вычитателя. 2 ил.
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА, содержащее задатчик, соединенные последовательно первый регулятор скорости, первый усилитель мощности и первый регулируемый электродвигатель, кинематически связанный через первый редуктор с первым исполнительным органом, на котором установлен первый импульсный измерительный преобразователь, соединенные последовательно второй регулятор скорости, второй усилитель мощности и второй регулируемый электродвигатель, кинематически связанный через второй редуктор с вторым исполнительным органом, на котором установлен второй импульсный измерительный преобразователь, причем регулируемые электродвигатели охвачены отрицательными обратными связями, выполненными в виде соответственно первого и второго тахогенераторов, встроенных в соответствующие регулируемые электродвигатели и соединенных с входами соответственно первого и второго регуляторов скорости через соответствующие сумматоры, отличающееся тем, что, с целью повышения точности получаемых зубчатых колес за счет обеспечения одинаковых условий обработки на обоих исполнительных органах, оно снабжено двумя вычитателями, двумя регуляторами положения, двумя ключами, управляемыми положительным потенциалом, импульсно-аналоговым преобразователем, фазовым дискриминатором, знаковым дискриминатором, инвертором и повторителем, при этом входы сложения вычитателей соединены с задатчиком, а входы вычитания - с выходами соответственного первого и второго ключей, у которых аналоговые входы соединены с выходом импульсно-аналогового преобразователя, соединенного своим входом с выходом фазового дискриминатора, управляющий вход первого ключа соединен с выходом инвертора, управляющий вход второго ключа - с выходом повторителя, входы инвертора и повторителя - с выходом знакового дискриминатора, первые входы фазового и знакового дискриминаторов - с первым импульсным измерительным преобразователем, вторые входы упомянутых дискриминаторов - с вторым импульсным измерительным преобразователем, входы первого и второго вычитателей - с входами соответственно первого и второго регуляторов положения, соединенных своими выходами с входами соответственно первого и второго регуляторов скорости через соответствующие сумматоры.
| Устройство для синхронизации приводов врезания и профилирования зубодолбежного станка | 1986 |
|
SU1371862A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
