Изобретение относится к системам управления, предназначено для обеспечения оператора тактильной информацией об отклонении текущих значений контролируемых параметров, преимущественно управляющих воздействий рычагов управления, от их заданных значений и может быть использовано в системах управления динамическими объектами, например самолетами и в системах управления с сигнальными устройствами.
Известен и широко используется в настоящее время способ, принятый за прототип, обеспечения летчиков тактильной информацией о выходе самолета на опасные режимы полета, включающий измерение текущего значения контролируемого параметра режима полета, вычисление разности между этим значением и заданным граничным значением того же параметра и создание с помощью вибратора при определенных значениях указанной разности колебательных перемещений (вибраций) рычага управления с малой амплитудой и частотой 10-30 Гц относительно задаваемых летчиком или автопилотом управляющих воздействий или положений рычага управления [2].
Наряду с достоинствами - простотой и относительно высокой надежностью, данному способу присущи недостатки, состоящие в том, что оператор обеспечивается информацией лишь в определенные моменты времени при выполнении заданного условия, причем летчик не обеспечивается количественной информацией о необходимой величине отклонения рычага управления, что не позволяет осуществить директорное управление объектом (самолетом) на основе поступающей тактильной информации.
Известно устройство для измерения тактильной чувствительности, содержащее держатель, на котором установлены элементы-раздражители, выполненные в виде тонких упругих стержней одинакового диаметра и различной длины [1]. Данное устройство предназначено для измерения тактильной чувствительности участков кожи пациентов и имеет соответственно ограниченную область применения.
Наиболее близким к предлагаемому является устройство, предназначенное для реализации описанного выше способа [2]. Устройство состоит из датчика для измерения контролируемого параметра, соединенного с управляющим блоком для вычисления разности между текущим и заданным значениями параметра, который соединен с приводом вибратора, механически связанного с рычагом управления. Недостатки устройства проявляются как следствие недостатков описанного выше способа, для реализации которого предназначено устройство данного типа.
Изобретение решает задачу расширения возможностей по использованию тактильной информации оператором, а именно позволяет обеспечить его легко воспринимаемой информацией о величине потребного управляющего воздействия (отклонения рычага управления или создаваемого оператором усилия на рычаге) по соответствующему каналу управления. Причем тактильное воздействие осуществляется таким образом, чтобы непосредственно на уровне подсознательных реакций побуждать оператора к созданию потребных управляющих воздействий рычагом управления.
Поставленная задача решается тем, что по способу обеспечения оператора тактильной информацией, заключающемуся в определении текущего значения контролируемого параметра режима движения, преимущественно управляющего воздействия рычагом управления, формировании сигнала, пропорционального разности между этим значением и заданным значением, и создании в зависимости от величины сформированного сигнала тактильного воздействия на руку оператора, охватывающую рычаг управления, тактильное воздействие по соответствующему каналу управления создают на рычаге управления с помощью подвижных элементов-раздражителей, причем их выдвигают в направлении создания требуемого управляющего воздействия рычагом управления на величину, зависящую от величины сигнала разности между текущим и заданным значениями контролируемого параметра, так что при равенстве этих значений элементы-раздражители находятся в невыдвинутом положении.
Поставленная задача решается также тем, что в устройстве обеспечения оператора тактильной информацией, содержащем по каждому каналу управления датчик сигнала текущего значения контролируемого параметра режима движения, преимущественно управляющего воздействия рычагом управления, выход которого соединен с первым входом блока формирования сигнала разности, второй вход которого подключен к блоку формирования сигнала заданного значения контролируемого параметра режима движения, а также блок создания тактильного воздействия с приводом, блок создания тактильного воздействия выполнен в виде подвижных элементов-раздражителей, установленных в рычаге управления в месте охвата рычага рукой оператора с возможностью их выдвижения из корпуса и уборки в корпус рычага управления с помощью привода, который выполнен следящим и снабжен управляющим устройством, вход которого соединен с выходом блока формирования сигнала разности.
Сущность изобретения заключается в следующем. В процессе управления динамическим объектом по соответствующему каналу управления при необходимости изменения управляющего воздействия на некоторую величину например для устранения рассогласования между заданным и текущим значениями контролируемого параметра, воздействуют с помощью расположенных в рычаге управления элементов-раздражителей по заданному каналу управления на соответствующие участки кожи руки оператора. Для этого элементы-раздражители перемещают с помощью приводов в направлении требуемого воздействия на рычаг управления. Величину их перемещения (выдвижения) задают соответствующей сигналу рассогласования между текущим и заданным значениями контролируемого параметра. Таким образом, оператор благодаря направленному дозированному выдвижению раздражителей получают за счет возникновения у него дискомфортных ощущений с определенной стороны рычага управления тактильное воздействие, интенсивность которого соответствует величине требуемого в данный момент дополнительного управляющего воздействия рычагом управления. Это побуждает оператора к активному воздействию на рычаг управления в направлении, требуемом для снятия дискомфортных ощущений. Следует однако заметить, что оператор, в конечном итоге, сам решает, воспользоваться ли ему полученной тактильной информацией и в определенных ситуациях принять решение на создание управляющего воздействия.
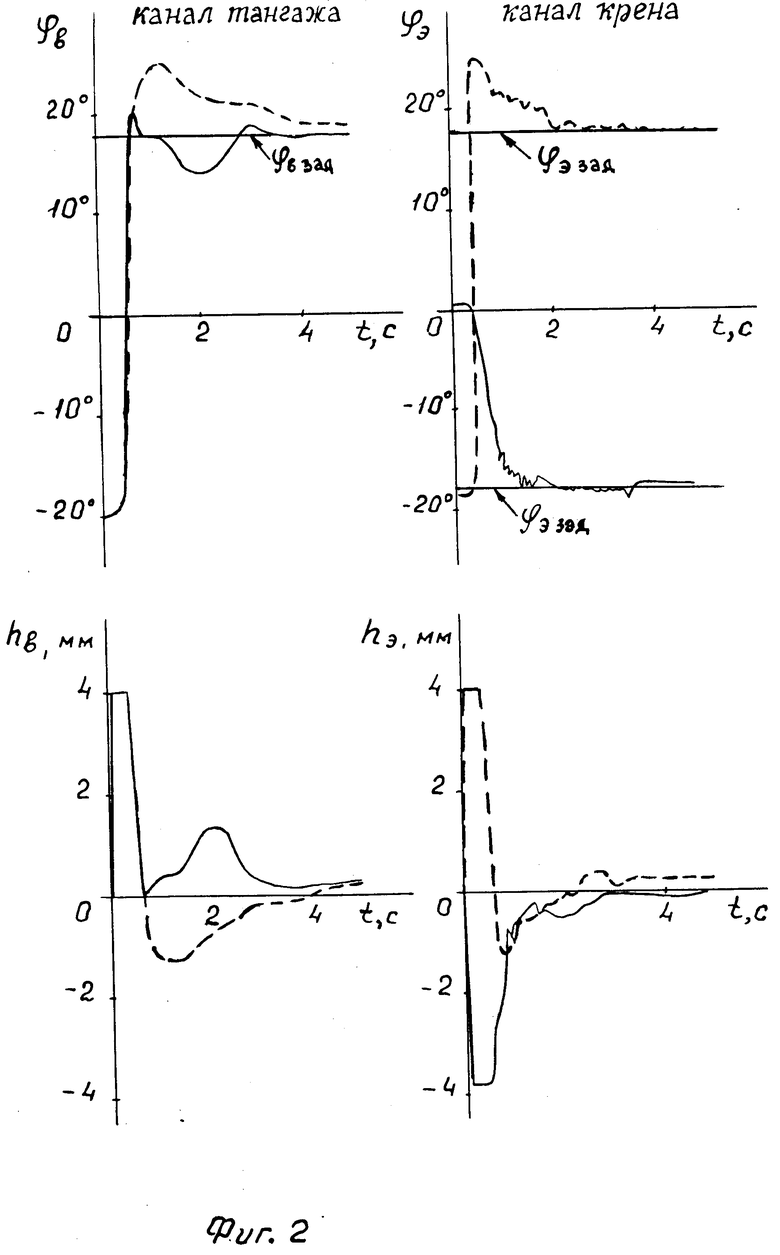
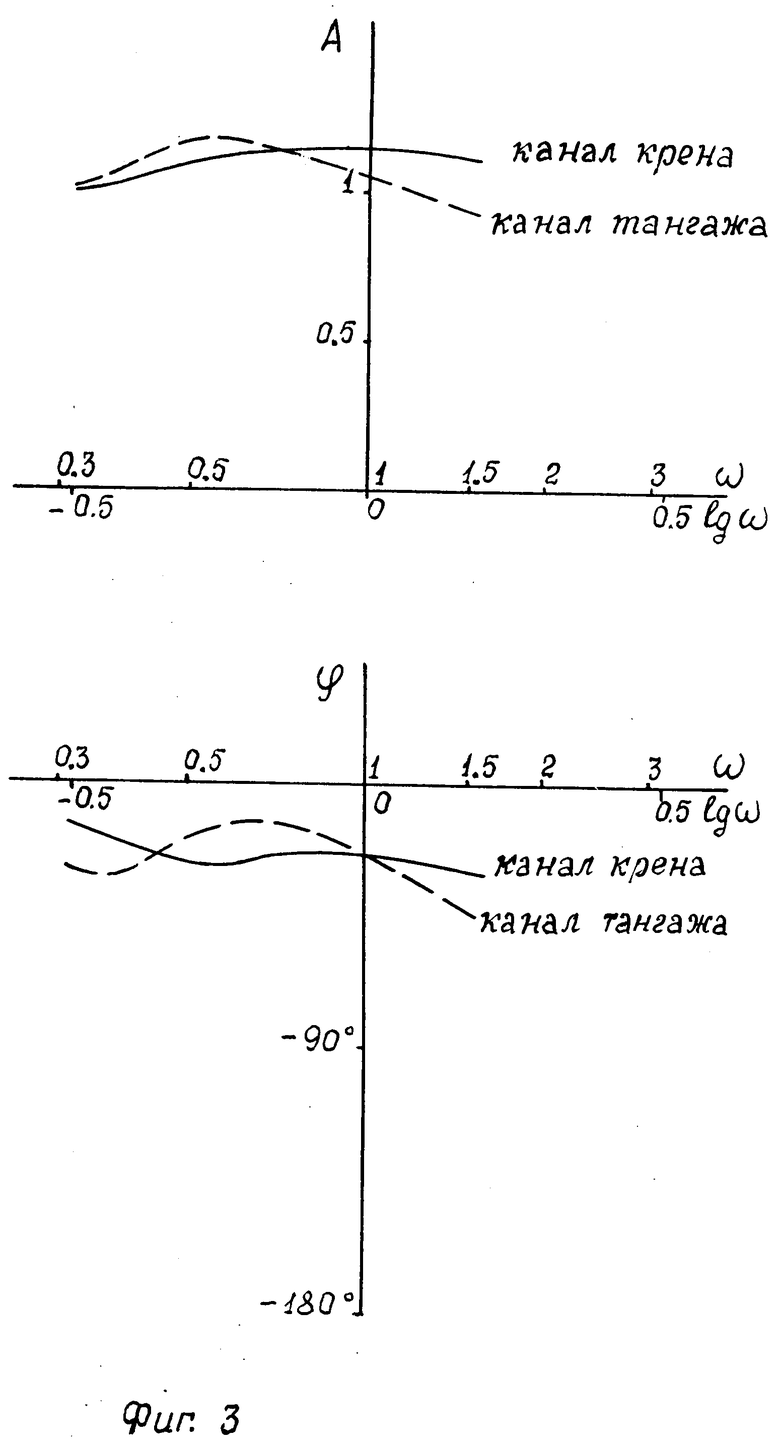
На фиг.1 представлена схема устройства (для простоты показан один канал управления); на фиг. 2 - представлены переходные процессы, иллюстрирующие реакцию оператора по управляющему воздействию рычагом управления на ступенчатое изменение сигнала заданного положения рычага управления, рассматриваемого в данном примере в качестве контролируемого параметра; на фиг.3 приведены частотные характеристики отработки оператором задаваемого положения рычага управления при его синусоидальном изменении.
Предлагаемый способ характеризуется следующими действиями. Определяют текущее значение контролируемого параметра режима, например, положения рычага управления, формируют сигнал, пропорциональный разности между текущим и заданным значениями контролируемого параметра. В зависимости от величины этого сигнала выдвигают на соответствующий ход элементы-раздражители из отверстий в рычаге управления, причем их выдвигают вы направлении требуемого управляющего воздействия рычагом управления.
Устройство для реализации указанных действий содержит (фиг.1) по каждому каналу управления расположенные внутри рычага управления выдвижные элементы-раздражители 1, кинематически соединенные со следящим приводом 2, содержащим управляющее устройство 3, вход которого подключен к выходу блока 4 формирования сигнала разности, один из входов которого соединен с датчиком 5 текущего значения контролируемого параметра, преимущественно управляющего воздействия рычагом управления, а другой - с блоком 6 формирования сигнала заданного значения контролируемого параметра.
Устройство работает следующим образом. При необходимости создания определенного управляющего воздействия, например отклонения рычага управления на заданный ход Хзад, на выходе блока 4 формирования сигнала разности по поступающим на его вход сигналам Хзад с выхода блока 6 формирования сигнала заданного положения рычага управления и Хтек с выхода датчика 5 управляющего воздействия вырабатывается сигнал U, пропорциональный величине требуемого дополнительного отклонения рычага управления Δ Х = Хза- -Хтек соответствующего знака U = К - ΔХ. Этот сигнал поступает на вход управляющего устройства 3, с выхода которого усиленный и соответствующим образом преобразованный сигнал Uупр поступает на привод 2, который выдвигает элементы-раздражители 1 данного канала управления в направлении требуемого отклонения рычага управления на величину h, например, пропорциональную отклонению Δ Х. В результате элементы-раздражители 1 воздействуют на соответствующие участки кожи руки оператора. Таким образом, оператор благодаря направленному и дозированному выдвижению элементов-раздражителей 1 получает за счет возникающих у него дискомфортных ощущений от воздействия на кожу руки элементов-раздражителей 1 с определенной стороны рычага управления тактильное воздействие с интенсивностью, например, пропорциональной требуемому в данный момент дополнительному отклонению рычага управления, причем эту тактильную информацию оператор воспринимает на уровне подсознания: рефлекторное желание уменьшить дискомфортные ощущения побуждает его к активному отклонению рычага управления в требуемом направлении на требуемую величину Δ Х, необходимую для снятия дискомфортных ощущений. При отклонении оператором рычага управления на величину ΔХ на первый вход блока 4 формирования сигнала разности с выхода датчика 5 управляющего воздействия поступает сигнал Хтек = Хзад. в результате на выходе блока 4 формирования сигнала разности сигнал обнуляется, и следящий привод 2 возвращает элементы-раздражители 1 в нейтральное (убранное) положение, тактильное воздействие на руку оператора исчезает.
Аналогично устройство работает в случае формирования управляющего воздействия по усилию на рычаге управления.
Элементы-раздражители по каждому каналу управления представляет собой например, выдвижные стержни с умеренно заостренными концевыми частями (чтобы усилить ощущение дискомфорта при их выдвижении). По каждому направлению действия могут быть установлены один или несколько элементов-раздражителей 1, например в продольном канале под указательный и безымянный пальцы, а в боковом под средний палец и мизинец (с противоположных сторон рычага управления элементы-раздражители действуют на различные участки ладони).
Следящие приводы 2 могут быть либо электрическими, либо электромагнитными, либо какого-нибудь иного принципа действия. Тип управляющего устройства 3 определяется типом следящих приводов 2.
Блок 4 формирования сигнала разности является усилительным звеном, например усилителем постоянного тока.
Тип датчика 5 соответствует контролируемому параметру, например в случае, когда контролируемым параметром является величина управляющего воздействия, используется датчик перемещения или датчик усилия на рычаге управления.
Блок 6 формирования сигнала заданного управляющего воздействия является вычислительным устройством в составе системы управления объектом. Тип и исполнение блока полностью определяются ее конструкцией.
Эффективность и надежность обеспечения оператора тактильной информацией с помощью предложенного устройства, реализующего заявленный способ, подтверждаются результатами специальных экспериментов, проведенных с использованием макетного образца устройства.
Как видно из фиг.2, оператор реагирует отклонением рычага управления в продольном (ХВ) или в поперечном (ХЭ) каналах управления в ответ на предъявление ступенчатого изменения сигнала заданного положения рычага управления. Время чистого запаздывания двигательной реакции оператора составляет при этом 0,3-0,4 с, а время срабатывания (отработки оператором тактильного воздействия) не превышает 1 с.
При синусоидальном изменении сигнала заданного положения рычага управления фазовое запаздывание ответной двигательной реакции оператора, как видно из фиг.3, в диапазоне частот до 1-1,2 рад/с не превосходит 30 град.
Все это говорит о высоких динамических свойствах тактильного канала информационного обеспечения оператора, организованного в соответствии с заявленным способом, что объясняется легкостью интерпретации тактильного воздействия оператором, при которой соблюдается мнемоническое правило совпадения направления действия тактильных элементов-раздражителей с направлением потребного воздействия оператора на рычаг управления. Эксперименты показали, что оператор активно и правильно реагирует на тактильные воздействия на уровне подсознания даже без предварительной тренировки. Предложенный способ обеспечения оператора тактильной информацией позволяет оператору соразмерять реализуемые им управляющие воздействия с потребными воздействиями.
Предложенный способ обеспечения оператора тактильной информацией и реализующее его устройство являются новыми, поскольку во всех известных способах и устройствах тактильной сигнализации используется вибрационное тактильное воздействие, которое сложно интерпретируется оператором в величину требуемого управляющего воздействия рычагом управления, не обладает сильными и направленными побуждающими свойствами и достаточной надежностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ С ПОМОЩЬЮ ДВУХ РЫЧАГОВ УПРАВЛЕНИЯ ОТ ОПЕРАТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2025411C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СПОСОБ КОНТРОЛЯ ПРОЧНОСТИ И ВИБРАЦИИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2363935C1 |
| СПОСОБ ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195869C2 |
| Устройство автоматического управления экзотермическим процессом в реакторе полунепрерывного действия | 1990 |
|
SU1804903A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПЕРВИЧНОЙ ПЕРЕРАБОТКИ НЕФТИ В СЛОЖНОЙ РЕКТИФИКАЦИОННОЙ КОЛОННЕ | 1990 |
|
RU2040294C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА РЕЖИМАХ РАЗГОНА И ДРОССЕЛИРОВАНИЯ | 2009 |
|
RU2403419C1 |
| Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением мобильных машин | 2019 |
|
RU2730800C1 |
| СПОСОБ ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2613446C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387855C2 |
Изобретение относится к системам управления, например, движущимися объектами и позволяет обеспечить оператора тактильной информацией об отклонении текущих значений контролируемых параметров, преимущественно управляющих воздействий рычагом управления, от их заданных значений, что повышает точность управления и безопасность эксплеатации объекта. Суть способа состоит в том, что тактильоное воздействие по соответствующему каналу управления создают с помощью подвижных элементов-раздражителей, причем их выдвигают в направлении создания требуемого управляющего воздействия рычагом управления на величину, зависящую от величины сигнала разности между текущим и заданным значениями контролируемого параметра. Дозированное выдвижение элементов-раздражителей с определенной стороны рычага управления непосредственно на подсознательном уровне побуждает оператора к созданию управляющего воздействия нужного направления и величины. Способ реализуется устройством, содержащим по каждому каналу управления расположенные внутри рычага управления выдвижные элементы-раздражители 1, кинематически соединенные со следящим приводом 2, содержащим управляющее устройство 3, вход которого подключен к выходу блока 4 формирования сигнала разности, один из входов которого соединен с датчиком 5 текущего значения контролируемого параметра, а другой - с блоком 6 формирования его заданного значения. При равенстве текущего значения заданному элементы-раздражители находятся в убранном положении и не вызывают у оператора дискомфортных ощущений. 2 с.п. ф-лы, 3 ил.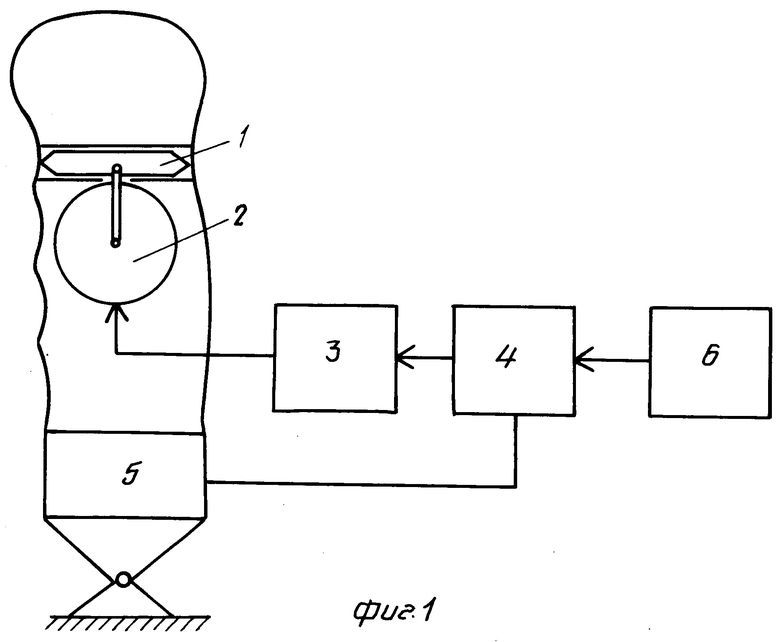
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Девис Д | |||
| Пилотирование больших реактивных самолетов./Пер | |||
| с англ | |||
| Под ред | |||
| В.Н.Нартова | |||
| М.: Машиностроение, 1984, с.153-155. | |||
