Изобретение относится к системам управления, предназначено для дистанционного управления динамическими объектами одновременно двумя операторами с обеспечением тактильной взаимосвязи двух рычагов управления, не связанных механически, и может быть использовано в системах дистанционного управления различными объектами, например самолетами.
Обеспечение каждого из операторов, охватывающего рукой свой рычаг управления, тактильной (получаемой рукой через кожу) информацией о текущем положении рычага управления другого оператора имеет важное значение для повышения точности управления и безопасности эксплуатации динамических объектов, особенно самолетов (Экспресс-информация ОНТИ ЦАГИ, серия Авиационная и ракетная техника, N 1629, 1990, с. 3).
Известен и широко используется способ управления динамическими объектами с обеспечением взаимосвязи двух рычагов управления, заключающийся в том, что передают воздействие од одного рычага к другому и наоборот с помощью соединяющей их механической проводки (например, Моргунов Н.Н. Самолет ЛИ-2. - М.: Транспорт, 1968, с. 54).
Недостатками этого способа являются ухудшение динамических характеристик передачи управляющих воздействий операторов из-за инерционности, трения, люфтов и упругости конструкции механической проводки, особенно в случае большого расстояния между рычагами управления, громоздкость, конструктивная сложность, большие потребные объемы и дополнительный вес конструкции механической проводки, сложность взаимодействия операторов при использовании малогабаритных рычагов управления с относительно малыми загрузочными усилиями по сравнению с максимальными физическими возможностями человека-оператора.
Известны системы управления самолетами, в которых реализуется указанный способ управления, содержащие рычаги управления двух операторов (например, левого и правого или переднего и заднего летчиков), которые кинематически связаны с помощью механической проводки, подключенной к исполнительной части системы управления (Житомирский Г. И. Конструкция самолетов. - М.: Машиностроение, 1991, с. 314).
Устройства данного типа обладают теми же функциональными недостатками, что и лежащий в их основе способ управления.
В настоящее время широкое распространение получили дистанционные системы управления, в которых механическая проводка отсутствует и нет необходимости прикладывать значительные усилия для ее перемещения, в связи с чем переходят на малогабаритные механически не связанные рычаги управления, как, например, на самолете фирмы Эрбас Индастри А-320 (Техническая информация ОНТИ ЦАГИ, N 9, 1986, с. 10-12). Проблема обеспечения взаимосвязи двух рычагов управления в таких системах весьма актуальна.
Известен способ дистанционного управления динамическими объектами с помощью двух рычагов управления от операторов, заключающийся в том, что измеряют величину управляющего воздействия на каждый рычаг управления, например, с помощью датчиков, сигналы, пропорциональные этим воздействиям, подают на соответствующие входы блока формирования общего управляющего сигнала, формируют в этом блоке общий управляющий сигнал и посылают этот сигнал с выхода блока на вход исполнительной части системы управления (заявка Франции N 2583017, кл. B 64 C 13/12; G 05 D 1/10, 1986).
Принципиальный и существенный недостаток данного способа состоит в том, что взаимосвязь рычагов осуществляется только через восприятие каждым оператором реакции управляемого объекта в ответ на управляющие воздействия, прикладываемые им и другим оператором. Это приводит к снижению точности и безопасности управления в случаях, когда операторы начинают управлять объектом одновременно и независимо друг от друга из-за отсутствия у них непосредственной информации об управляющих воздействиях друг друга, например тактильной информации.
Известна система управления, которая реализует указанный способ, содержащая два рычага управления и по каждому каналу управления для каждого рычага управления датчик управляющего воздействия, подключенный к соответствующему входу блока формирования общего управляющего сигнала, выход которого подключен к входу исполнительной части системы управления (заявка Франции N 2583017, кл. B 64 C 13/12; G 05 D 1/10, 1986).
Данное устройство обладает тем же функциональным недостатком, что и реализуемый им способ дистанционного управления, поскольку он не дает оператору непосредственной информации об управляющем воздействии второго оператора.
Изобретение решает задачу повышения точности управления и безопасности эксплуатации динамических объектов с механически не связанными рычагами управления за счет обеспечения тактильной взаимосвязи рычагов управления путем передачи каждому оператору тактильной информации о величине управляющего воздействия другого оператора. Причем тактильное воздействие осуществляется таким образом, что оно непосредственно побуждает операторов к уменьшению рассогласования их управляющих воздействий, что особенно важно в случаях, когда один оператор обучает другого.
Поставленная задача решается в изобретении тем, что по способу дистанционного управления динамическими объектами с помощью двух рычагов управления от операторов, заключающемуся в измерении величины сигнала управляющего воздействия с каждого рычага управления, формирования по сигналам, пропорциональным этим воздействиям, общего управляющего сигнала и подаче этого сигнала на исполнительную часть системы управления динамического объекта, в каждом канале управления вычисляют разность сигналов управляющих воздействий с рычагов управления, формируют соответствующие этой разности и величинам сигналов управляющего воздействия с каждого рычага сигналы тактильной взаимосвязи противоположных знаков для обоих рычагов управления, в зависимости от величины этих сигналов выдвигают расположенные в рукоятках рычагов управления элементы-раздражители, обеспечивая каждого оператора тактильной информацией о величине рассогласования между управляющими воздействиями на рычаги управления, тем самым изменяют общий управляющий сигнал за счет изменения управляющих воздействий операторов, обусловленных использованием ими тактильной информации о величине рассогласования сигналов управляющих воздействий.
Поставленная задача решается также тем, что в устройство дистанционного управления динамическими объектами с помощью двух рычагов управления операторов, содержащее по каждому каналу управления каждого рычага управления датчик сигнала управляющего воздействия, подключенный к соответствующему входу блока формирования общего управляющего сигнала, выход которого подключен к входу исполнительной части системы управления, по каждому каналу управления введены сумматор, блок формирования сигналов тактильной взаимосвязи и масштабные инвертирующий и неинвертирующий блоки, а на каждом рычаге управления размещены по числу каналов управления блоки формирования тактильного воздействия в зависимости от величины рассогласования сигналов управляющих воздействий операторов, каждый из которых выполнен в виде подвижных элементов-раздражителей, установленных в рукоятке рычага управления в месте ее охвата рукой оператора с возможностью их выдвижения во вне и уборки внутрь рукоятки с помощью следящего привода, причем блок формирования сигнала тактильной взаимосвязи выполнен в виде последовательно соединенных первого и второго управляемых масштабных блоков и корректирующего блока, управляющий вход первого управляемого масштабного блока соединен с выходом датчика сигнала управляющего воздействия первого рычага управления, а управляющий вход второго управляемого масштабного блока соединен с выходом датчика сигнала управляющего воздействия второго рычага управления, при этом неинвертирующий вход сумматора соединен с выходом датчика управляющего воздействия второго рычага управления, а инвертирующий вход сумматора подключен к выходу датчика управляющего воздействия первого рычага управления, выход сумматора соединен с входом первого управляемого масштабного блока, а выход корректирующего блока соединен через неинвертирующий масштабный блок с входом следящего привода элементов-раздражителей первого рычага управления и через инвертирующий масштабный блок с входом следящего привода элементов-раздражителей второго рычага управления.
Сущность изобретения заключается в следующем. В процессе управления динамическим объектом по одному каналу управления при необходимости, например, выполнить маневр или устранить рассогласование контролируемых параметров движения с их заданными значениями воздействуют на рычаги управления по соответствующему каналу управления. В случае одновременных управляющих воздействий на оба рычага управления, превосходящих по модулю некоторое заданное значение, воздействуют с помощью расположенных в рукоятках рычагов управления элементов-раздражителей по соответствующему каналу управления на участки кожи рук операторов. Для этого элементы-раздражители каждого рычага управления выдвигают из корпуса рычага в том направлении, в котором соответствующему оператору следует приложить дополнительное управляющее воздействие, чтобы уравнять свое управляющее воздействие с воздействием другого оператора. Величину выдвижения элементов-раздражителей задают соответствующей величине разности сигналов управляющих воздействий операторов. Таким образом, каждый из операторов, управляющих объектом, благодаря направленному дозированному выдвижению элементов-раздражителей получает за счет возникающих у него дискомфортных ощущений с определенной стороны рычага управления тактильное воздействие, направление и интенсивность которого соответствуют величине требуемого в данный момент дополнительного управляющего воздействия рычагом управления для приведения его в положение, идентичное положению другого рычага управления, т.е. для их синхронизации. Фактически каждый оператор получает информацию о текущем положении рычага управления другого оператора. Направленное тактильное воздействие непосредственно побуждает каждого оператора к силовому воздействию на рычаг управления в направлении, соответствующем снятию дискомфортных ощущений и одновременно уменьшению рассогласования положений рычагов управления. Однако следует отметить, что в конечном счете каждый оператор сам решает, каким образом ему следует воспользоваться полученной тактильной информацией.
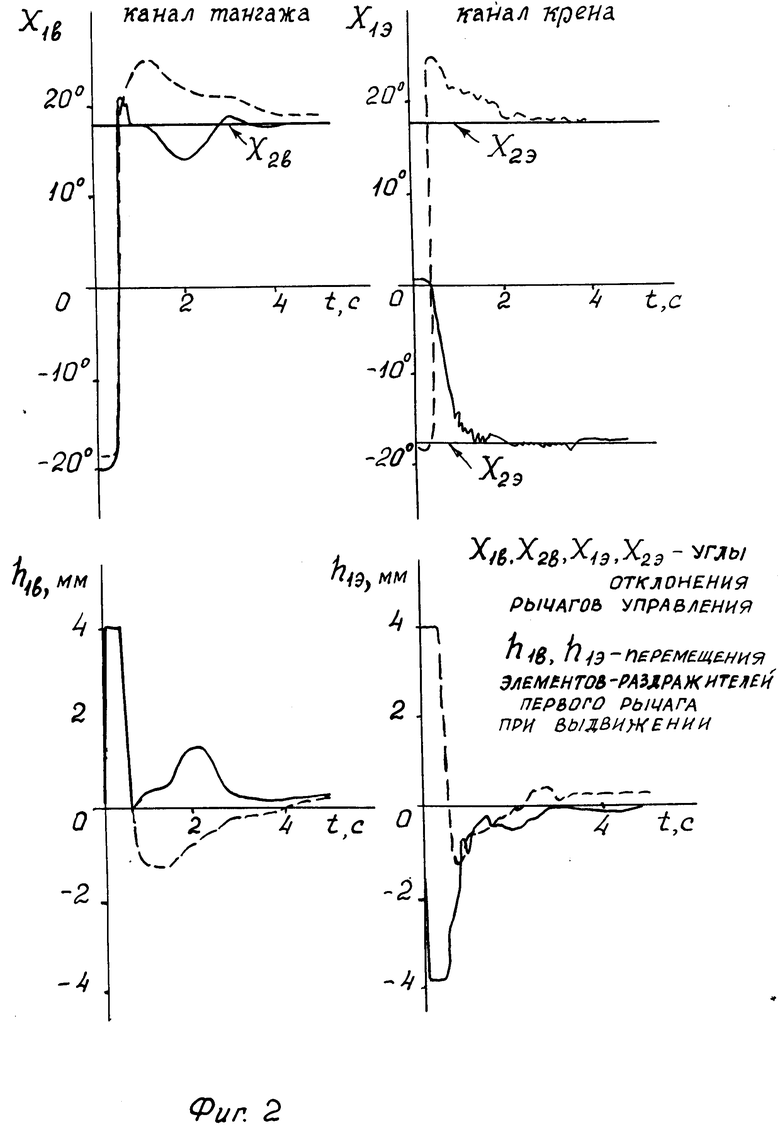
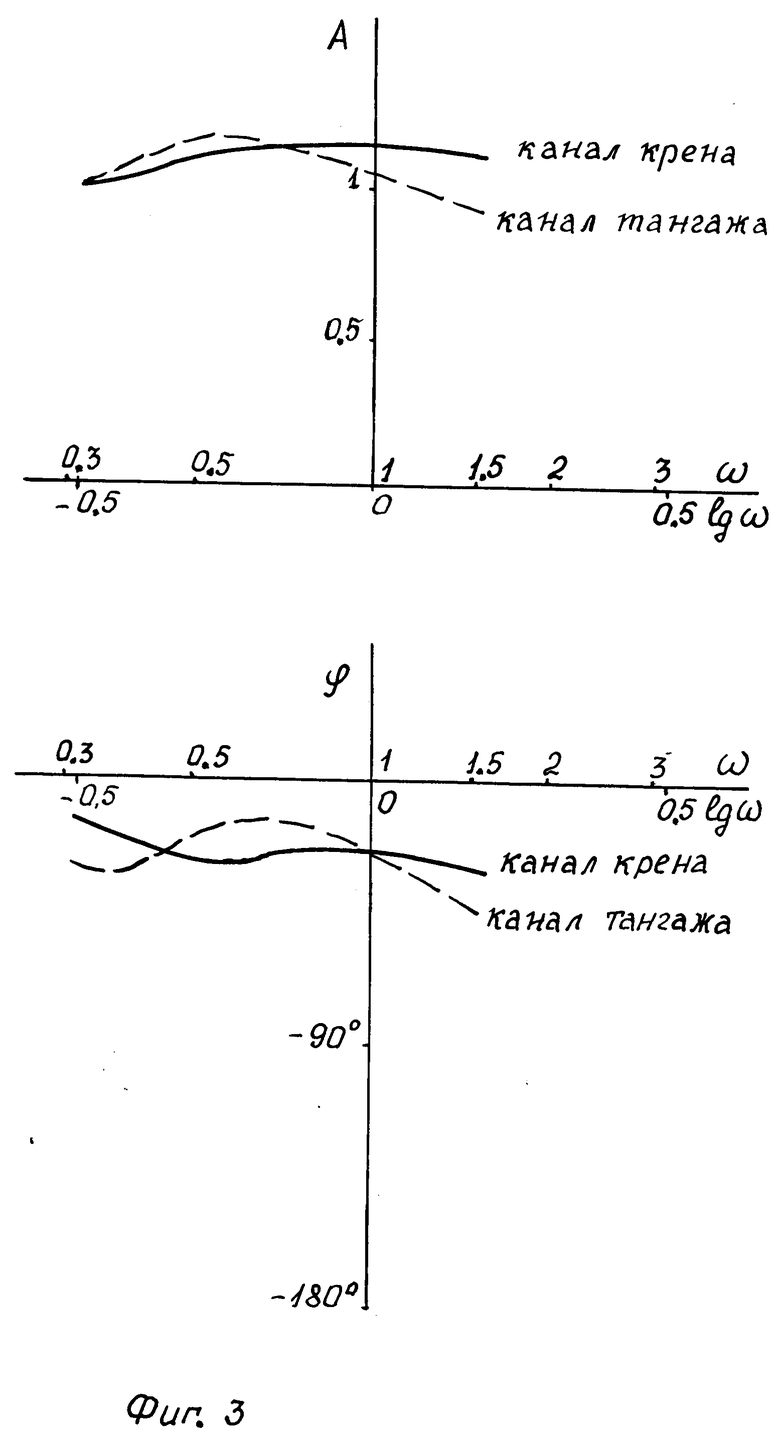
На фиг.1 показана схема устройства (для простоты показан один канал управления); на фиг.2 представлены переходные процессы, иллюстрирующие реакцию оператора по управляющему воздействию рычагом управления в ответ на ступенчатое изменение управляющего сигнала другого оператора при необходимости уравнять управляющие сигналы; на фиг.3 - частотные характеристики отработки оператором задаваемого положения рычага управления другого оператора.
Предлагаемый способ характеризуется следующими действиями: измеряют управляющие воздействия на каждый рычаг управления, например, с помощью соответствующих датчиков, сигналы управляющих воздействий с датчиков подают на вход блока формирования общего управляющего сигнала, общий управляющий сигнал подают на вход исполнительной части системы управления, формируют сигнал тактильной взаимосвязи рычагов управления, соответствующий сигналу разности и величинам сигналов управляющего воздействия с каждого рычага управления, в зависимости от величины сигнала тактильной взаимосвязи выдвигают элементы-раздражители из отверстий в рукоятках рычагов управления во взаимно противоположных направлениях для одного и другого рычагов управления, изменяют общий управляющий сигнал за счет изменения управляющих воздействий операторов, обусловленного использованием ими тактильной информации о рассогласовании управляющих воздействий операторов.
Устройство для реализации указанных действий содержит (фиг.1) рычаги 1 и 2 управления, внутри которых по каждому каналу управления расположены выдвижные элементы-раздражители 3 и 4, кинематически соединенные со следящими приводами 5 и 6, которые могут быть размещены как внутри рычагов управления, так и вне их и входы которых через соответствующие неинвертирующий 7 и инвертирующий 8 масштабные блоки соединены с выходом блока 9 формирования сигнала тактильной взаимосвязи. Рычаги 1 и 2 управления снабжены датчиками 10 и 11 сигналов управляющих воздействий, выходы которых подключены к блоку 12 формирования общего управляющего сигнала, выход которого соединен с входом исполнительной части системы управления, и соответственно с инвертирующим и неинвертирующим входами сумматора 13. Выход последнего соединен с входом 9 блока формирования сигнала тактильной взаимосвязи, представляющего собой последовательно соединенные первый 14 и второй 15 управляемые масштабные блоки и корректирующий блок 16, выход которого, являющийся и выходом блока 9, соединен с входами масштабных блоков 7 и 8. Управляющий вход первого управляемого масштабного блока 14 соединен с выходом датчика 10 сигнала управляющего воздействия рычага 1 управления. Управляющий вход второго управляемого масштабного блока 15 соединен с выходом датчика 11 сигнала управляющего воздействия рычага 2 управления.
Устройство работает следующим образом.
Операторы управляют динамическим объектом с помощью рычагов 1 и 2, при этом сигналы датчиков сигналов 10 и 11 управляющих воздействий поступают на соответствующие входы блока 12 формирования общего управляющего воздействия, сигнал с выхода которого поступает на вход исполнительной части системы управления. Сигналы датчиков 10 и 11 поступают также на инвертирующий и неинвертирующий входы сумматора 13. В случае одновременных различных сигналов управляющих воздействий Х1 и Х2 с рычагов 1 и 2 управления на выходе сумматора 13 образуется сигнал разности ΔХ = Х2 - Х1, который поступает на вход первого управляемого масштабного блока 14 блока 9 формирования сигнала тактильной взаимосвязи. При этом сигналы датчиков 10 и 11 поступают также на управляющие входы соответственно первого 14 и второго 15 управляемых масштабных блоков. Если величина сигнала датчика 10 управляющего воздействия рычага 1 управления превышает по модулю некоторое заданное малое значение Хпорог, то сигнал на выходе первого управляемого масштабного блока 14 равен сигналу рассогласования ΔХ. Если одновременно и величина сигнала Х2 датчика 11 управляющего воздействия рычага 2 управления, подаваемого на управляющий вход второго управляемого масштабного блока 15, также превышает по модулю указанное значение Хпорог, то и сигнал на выходе блока 15 равен сигналу рассогласования ΔХ. Для этого управляемые масштабные блоки 14 и 15 имеют характеристику с нулевым коэффициентом передачи в области малых значений сигнала по управляющему входу (т.е. при Х < Хпорог) и с единичным коэффициентом передачи в остальном диапазоне значений управляющего сигнала. В рассматриваемом случае сигнал Δ Х поступает на вход блока 16, предназначенного для коррекции как статических характеристик (например, введением определенных нелинейных особенностей), так и динамических характеристик (включая фильтрацию высоких частот) выходного сигнала блока 9 формирования сигнала тактильной взаимосвязи, который через масштабные блоки 7 и 8 поступает на входы следящих приводов 5 и 6, которые выдвигают элементы-раздражители 3 и 4 рычагов 1 и 2 управления во взаимно противоположных направлениях на величину в зависимости от сигнала Δ Х и для каждого рычага управления в направлении, необходимом для их синхронизации, т.е. для приведения их в положение, при котором Х1 = Х2. В результате элементы-раздражители 3 и 4 воздействуют на соответствующие участки кожи руки каждого оператора. Таким образом, каждый оператор благодаря направленному и дозированному выдвижению элементов-раздражителей 3 и 4 получает за счет возникающих у него дискомфортных ощущений от воздействия элементов-раздражителей с определенной и противоположной для каждого из двух рычагов управления стороны рукоятки тактильную информацию о разности управляющих воздействий операторов. Интенсивность, заметность этой информации на каждом рычаге управления тем больше, чем больше разность управляющих воздействий. Причем операторы воспринимают и перерабатывают тактильную информацию на уровне подсознания: рефлекторное желание уменьшить дискомфортные ощущения побуждает каждого оператора к активному воздействию на рычаг управления в направлении, соответствующем уменьшению рассогласования управляющих воздействий операторов.
По достижении операторами равенства их управляющих воздействий (Х1 = Х2) выход сумматора 13 обнуляется и при достаточно длительном выполнении этого условия обнуляются и выходы масштабных блоков 7 и 8, следящие приводы 5 и 6 возвращают элементы-раздражители в нейтральное (убранное) положение, тактильное воздействие на пальцы и ладони операторов исчезает.
Когда сигнал хотя бы одного из датчиков 10 или 11 управляющих воздействий по модулю меньше некоторого заданного малого значения Хпорог, обнуляется коэффициент передачи одного из управляемых масштабных блоков 14 или 15, в результате чего на вход корректирующего блока 16 подается нулевой сигнал. Если условие I Х1 I < I ХпорогI или условие I Х2 < I Хпорог I выполняется длительное время, то обнуляется и выход корректирующего блока 16, на входы следящих приводов 5 и 6 подается нулевой сигнал, подвижные элементы-раздражители 3 и 4 находятся в нейтральном (убранном) положении и тактильная связь двух рычагов управления фактически прерывается, поскольку в ней нет необходимости, так как в это время объектом фактически управляет один оператор. Если упомянутые условия выполняются в течение короткого промежутка времени, например при прохождении одним из рычагов управления нейтрального положения при одновременном управлении объектом двумя операторами, то в этом временном промежутке выход корректирующего блока 16, отфильтровывающего высокочастотную составляющую сигнала, изменяется незначительно, т.е. кратковременные обнуления сигнала на входе блока 16 не оказывают существенного влияния на положение элементов-раздражителей 3 и 4.
Элементы-раздражители 3 и 4 рычагов 1 и 2 управления по каждому каналу управления представляют собой, например, выдвижные стержни, концы которых имеют умеренное заострение, чтобы усилить ощущение дискомфорта при выдвижении стержней. По каждому каналу управления могут быть установлены один или несколько элементов-раздражителей, например в продольном канале под указательный и безымянный пальцы, а в боковом канале под средний палец и мизинец (с противоположных сторон рукояток рычагов 1 и 2 управления элементы-раздражители воздействуют на соответствующие участки кожи ладоней операторов).
Следящие приводы 5 и 6 могут быть электрическими либо какого-нибудь иного принципа действия. Масштабные блоки 7 и 8 усилительными звеньями, например усилителями постоянного тока. Датчики 10 и 11 управляющих воздействий могут быть либо датчиками положения, либо датчиками усилия, что определяется конструкцией системы управления. Сумматор 13 является решающим устройством, например операционным усилителем. Управляемые масштабные блоки 14 и 15 и корректирующий блок 16 являются решающими устройствами и могут быть выполнены на базе операционных усилителей или микросхем. Блок 12 формирования общего управляющего сигнала является вычислительным устройством в составе системы управления объектом, его тип и исполнение полностью определяются конструкцией системы управления и принятыми законами управления.
Эффективность обеспечения операторов тактильной информацией об относительном положении двух рычагов управления с помощью устройства, реализующего заявляемый способ, подтверждается результатами экспериментальных исследований макетного образца устройства. Как видно из фиг.2, в задаче отслеживания оператором своим рычагом управления положения рычага управления другого оператора с целью минимизации рассогласования управляющих воздействий оператор реагирует отклонением рычага 1 управления в продольном (ХВ) и поперечном (ХЭ) каналах управления на ступенчатое отклонение вторым оператором рычага 2 управления. При этом время чистого запаздывания двигательной реакции оператора составляет 0,3-0,4 с, а время срабатывания (отработки оператором тактильного воздействия) не превышает 1 с.
При отслеживании оператором с помощью рычага 1 управления синусоидального изменения положения рычага 2 управления, как видно из фиг.3, фазовое запаздывание двигательной реакции оператора в диапазоне частот до 1 - 1,2 рад/с не превышает 30 град.
Все это говорит о достаточно высоких динамических характеристиках тактильного канала информационного обеспечения оператора, что объясняется легкостью интерпретации оператором тактильного воздействия, при котором соблюдается мнемоническое правило совпадения направления воздействия тактильных элементов-раздражителей с направлением воздействия на рычаг управления, потребным для минимизации рассогласования между управляющими воздействиями двух операторов. В сочетании с возможностью соразмерять реализуемые оператором управляющие воздействия с величиной ощущаемого тактильного воздействия это позволяет эффективно решать задачу синхронизации управляющих воздействий и взаимосвязи двух механически не связанных рычагов управления. Кроме того, тактильная взаимосвязь механически не связанных рычагов управления позволяет оператору, управляющему динамическим объектом в одиночку, эффективно решать задачу своевременного обнаружения вмешательства второго оператора в управление, то очень важно для повышения точности управления и безопасности эксплуатации объектов.
Предложенный способ и устройство для его реализации удовлетворяют требованиям изобретательского уровня, являются новыми, дают положительный эффект и технически реализуемы. Эффективность изобретения подтверждена экспериментально.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ОПЕРАТОРА ТАКТИЛЬНОЙ ИНФОРМАЦИЕЙ ПРЕИМУЩЕСТВЕННО О ТРЕБУЕМОМ УПРАВЛЯЮЩЕМ ВОЗДЕЙСТВИИ РЫЧАГОМ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2025410C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
RU2040433C1 |
| ДАТЧИК ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2000 |
|
RU2209459C2 |
| Способ контроля и регулирования процесса электронно-лучевой сварки и устройство для его осуществления | 1985 |
|
SU1336377A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СЛЕДЯЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ НЕИЗМЕРЯЕМЫХ ВОЗМУЩЕНИЙ | 1991 |
|
RU2051401C1 |
Изобретение относится к системам управления динамическими объектами, управляемыми одновременно двумя операторами с помощью рычагов управления, не связанных механически, и позволяет обеспечить операторов тактильной информацией о величине рассогласования управляющих воздействий от рычагов управления, что дает возможность каждому оператору своевременно определять момент вмешательства другого оператора в управление и при необходимости синхронизировать управляющие воздействия операторов. Тем самым достигается повышение точности управления объектом и безопасности его эксплуатации. Суть способа состоит в том, что в зависимости от величины разности сигналов управляющих воздействий рычагов управления выдвигают расположенные в рукоятках рычагов элементы-раздражители так, чтобы направление и величина их выдвижения для каждого рычага управления сообщали оператору, в каком направлении и какой величины требуется дополнительное воздействие на рычаг управления для приведения его в положение, идентичное положению рычага управления другого оператора. При этом выдвижение элементов-раздражителей побуждает операторов к уменьшению рассогласования их управляющих воздействий на подсознательном уровне, поскольку, воздействуя на рычаги в нужном направлении, операторы уменьшают свои дискомфортные ощущения от элементов-раздражителей. Способ реализуется устройством, содержащим, в частности, датчики 10 и 11 сигналов управляющих воздействия, сумматор 13, блок 9 формирования сигнала тактильной взаимосвязи, неинвертирующий 7 и инвертирующий 8 масштабные блоки, следящие приводы 5 и 6 и элементы-раздражители 3 и 4 рычагов 1 и 2 управления. При равенстве управляющих воздействий от рычагов 1 и 2 управления элементы-раздражители 3 и 4 находятся в убранном положении и не вызывают у операторов дискомфортных ощущений. 2 с.п. ф-лы, 3 ил.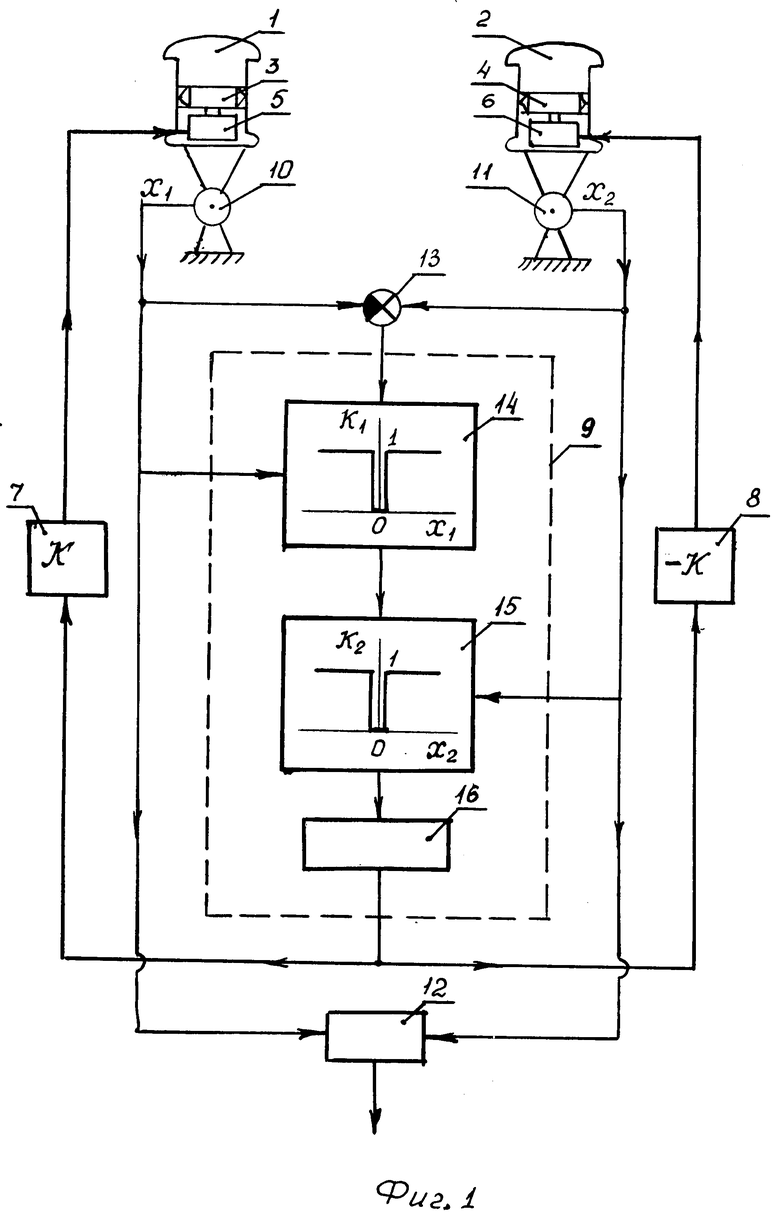
| СОДЕРЖАЩАЯ ОДНОНАПРАВЛЕННЫЕ ВОЛОКНИСТЫЕ ЛЕНТЫ ВОЛОКНИСТАЯ ЗАГОТОВКА ИЗ ПУЧКОВ АРМИРУЮЩИХ ВОЛОКОН И КОНСТРУКТИВНЫЙ ЭЛЕМЕНТ ИЗ КОМПОЗИТНОГО МАТЕРИАЛА | 2011 |
|
RU2583017C2 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
