Изобретение относится к машиностроению, касается испытательной техники и предназначено для проведения испытаний бесступенчатых дифференциальных механизмов поворота со следящей системой управления (БДМПсССУ) движением мобильных машин.
Стендовые испытания являются важнейшим этапом процесса проверки качества и доводки узлов транспортных средств. Для того чтобы их результаты были достоверными, при испытаниях должна обеспечиваться высокая точность имитации эксплуатационных режимов. Для определения работоспособности механизма поворота и настройки основных параметров следящей системы управления движением все устройство в целом должно отрабатываться на функционирование. Так, например, при испытании трансмиссии со следящей системой управления движением, необходимо иметь стенд, в котором элементы механизма поворота будут реагировать на сигналы датчиков положения транспортного средства в пространстве и отклонения органов управления.
Первоначально испытания выполнялись на стендах, которые обеспечивали возможность воспроизведения только постоянного режима работы механической части трансмиссии без элементов следящей систему управления движением.
Известны стенды для испытаний трансмиссий мобильных машин, содержащие в общем случае стационарно закрепленную на основании раму с установленным на ней приводом, соединенным с испытуемой трансмиссией (а.с. СССР № 1569673, патент RU №1605149, кл. G 01 М 13/02).
В качестве наиболее близкого по технической сущности выбран стенд для испытаний трансмиссий мобильных машин (патент RU № 2153659, МПК G01M 13/02, опубл. 27.07.2000), содержащий стационарно закрепленную на основании раму с установленным на ней приводом, соединенным с испытуемой трансмиссией.
Недостатком указанных известных стационарных стендов является низкая точность имитации эксплуатационных режимов из-за невозможности воспроизведения пространственного движения мобильных машин и, как следствие, практически ограниченные возможности регулировки и настройки параметров БДМПсССУ движением.
Очевидно, что стенды данного типа не позволяют проводить настройки и проверки БДМПсССУ мобильных машин по сигналам, получаемым в результате движения по заданной траектории.
Техническая задача изобретения направлена на расширение функциональных возможностей стенда, позволяющих определить работоспособность и выполнить настройку ССУ движением, а также обеспечить контроль основных параметров БДМП путем имитации в стационарных стендовых условиях входных воздействий на элементы ССУ, в максимальной степени соответствующих реальным условиям движения машины в пространстве, при одновременном снижении трудоемкости и стоимости этих работ, за счет исключения необходимости использования подвижных транспортных средств.
Техническая задача изобретения достигается тем, что стенд для испытания БДМПсССУ движением мобильных машин содержит неподвижно установленный на основании остов машины с приводом, размещенный на остове и кинематически связанный с приводом БДМПсССУ движением, включающей ручку управления поворотом - командоконтроллер, гирокомпас с акселерометром, датчики скорости вращения ведущих колес, микропроцессорный блок управления и электрогидрораспределитель, согласно изобретению стенд дополнительно снабжен направляющей, выполненной в виде гибкого монорельса на штативах и установленной по внешнему контуру остова машины и БДМП, на направляющей установлена каретка с гирокомпасом и акселерометром из состава ССУ, при этом каретка и гирокомпас выполнены с возможностью коммутации с микропроцессорным блоком управления.
Неожиданный эффект от использования существенных признаков предлагаемого устройства заключается в том, что на стенде, содержащем только моторно-трансмиссионную установку, без ходовой системы, появляется возможность имитировать реальные условия движения для испытания следящей системы управления машины.
Выполнение направляющей в виде гибкого монорельса на штативах, ее расположение и конфигурация в пространстве позволяет имитировать любую заранее заданную траекторию движения центра масс мобильной машины с БДМПсССУ движением.
Существенные признаки заявляемого технического решения позволяют обеспечить расширение функциональных возможностей стенда для испытания трансмиссий мобильных машин со следящей системой управления движением путем имитации в стационарных стендовых условиях входных воздействий на элементы ССУ, в максимальной степени соответствующих реальным условиям движения машины.
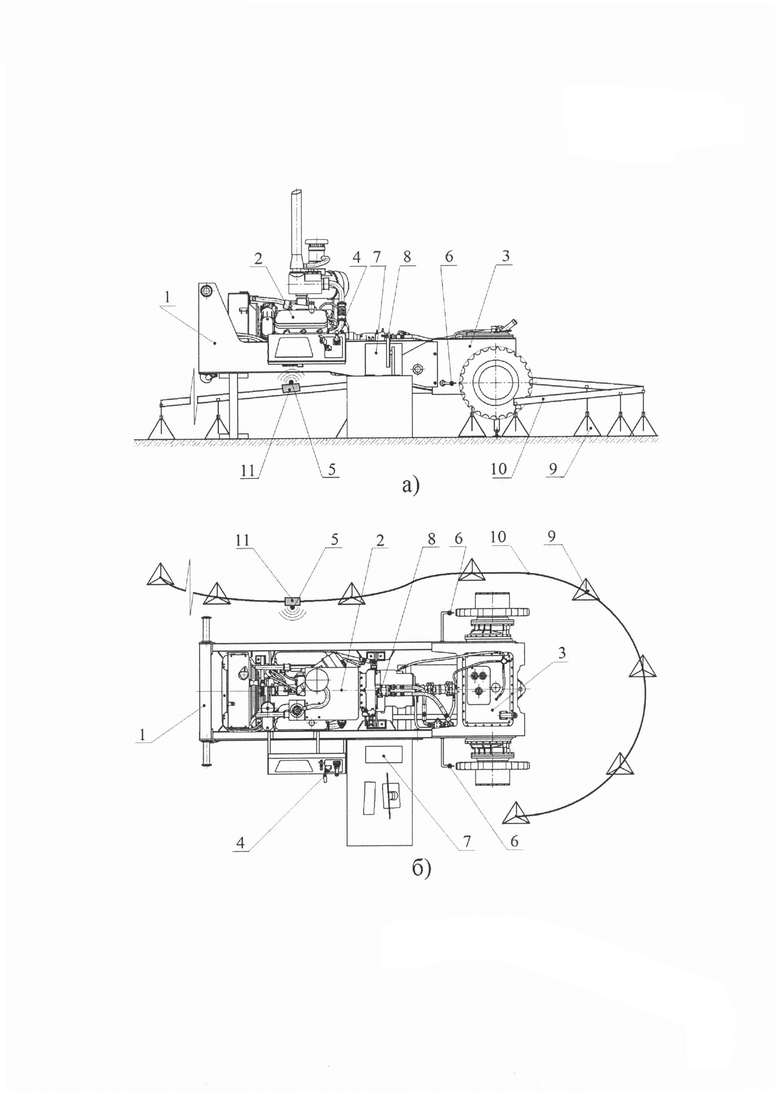
Сущность изобретения поясняется графическими материалами, где на фиг. представлен общий вид стенда: а) - вид сбоку, б) - вид сверху.
Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением мобильных машин содержит неподвижно установленный на основании остов машины 1 с приводом 2, размещенный на остове и кинематически связанный с приводом испытуемый бесступенчатый дифференциальный механизм поворота 3 со следящей системой управления (ССУ) движением, включающей ручку управления поворотом (командоконтроллер) 4, гирокомпас 5 с акселерометром, датчики скорости 6 вращения ведущих колес, микропроцессорный блок управления (МБУ) 7 и электрогидрораспределитель 8, а также установленную на штативах 9 направляющую 10 с подвижной кареткой 11 для размещения на ней гирокомпаса 5 с акселерометром из состава ССУ, имеющего коммутацию с МБУ 7. Направляющая 10 выполнена в виде гибкого монорельса, требуемое расположение и конфигурация которой в пространстве обеспечивается настройкой штативов 9. Подвижная каретка 11 снабжена автономным приводом и управлением (на фиг. не показано), обеспечивающим ее движение по направляющей 10. Параметры движения каретки 11 по направляющей 10 согласованы с параметрами движения привода 2.
ССУ направлена на поддержание постоянной траектории движения мобильной машины, заданной ручкой управления поворотом 4. ССУ представляет собой систему управления с обратной связью, которая осуществляет прием и обработку входных сигналов, и выработку выходного сигнала управления в соответствии с заданной передаточной функцией. Входными сигналами ССУ являются: сигнал управления - от ручки управления поворотом 4 (сигналы оператора, задающие траекторию движения машины, и включения / отключения режима «прямого управления») и сигналы обратной связи - от гирокомпаса 5 с акселерометром (сигналы, характеризующие текущую траекторию движения машины) и от датчиков скорости 6 вращения ведущих колес машины.
Выходным сигналом ССУ является сигнал управления для электрогидравлического распределителя 8, генерируемый МБУ 7. При этом МБУ 7 является центральным элементов всей ССУ.
Обработка сигналов, принимаемых от периферийных устройств (ручка управления поворотом 4, гирокомпас 5, датчики скорости 6 вращения ведущих колес) ССУ, осуществляется МБУ 7 в цифровом виде.
Функция, выполняемая ручкой управления поворотом 4, в ССУ - это основное устройство ввода информации оператором машины, осуществляющее формирование электрического сигнала, задающего траекторию движения машины.
Гирокомпас 5 со встроенным акселерометром позволяет получать данные о текущей траектории движения машины и служит элементом обратной связи для ССУ.
Для каждого из ведущих колес предназначен отдельный датчик 6, определяющий скорость его вращения. Датчики скорости вращения ведущих колес являются одним из элементов обратной связи ССУ и служат для измерения скорости вращения ведущих колес машины и передачи измеренного значения по цифровому интерфейсу связи в МБУ 7 для последующей обработки в соответствии с заданной передаточной функцией.
МБУ 7 осуществляет прием и обработку входных сигналов ССУ и выработку выходного управляющего сигнала на электрогидрораспределитель 8 в соответствии с заданной передаточной.
Управление работой электрогидрораспределителя 8 осуществляет МБУ 7 посредством изменения мощности, подводимой к блоку катушек электрогидрораспределителя, что приводит к перемещению гидравлического распределителя, установленного на машине.
Стенд работает следующим образом.
1) Режим прямолинейного равномерного движения.
Включить стенд и установить неизменные обороты привода 2. При этом ручка управления поворотом 4 должна находиться в нейтральном положении, а каретка 11 с гирокомпасом 5 занимать неподвижное положение на направляющей 10, что соответствует режиму прямолинейного равномерного движения машины. БДМПсССУ должен обеспечить равенство частот вращения ведущих колес, контролируемых датчиками скорости 6. В случае отсутствия равенства частот вращения ведущих колес, произвести настройку ССУ.
2) Режим установившегося поворота заданного радиуса.
Задать направляющей 10 дугу изгиба в горизонтальной плоскости требуемого радиуса, путем соответствующего размещения штативов 9 на основании. Включить стенд и установить неизменные обороты привода 2. Отклонить ручку управления поворотом 4 на величину, соответствующую заданному радиусу поворота машины. Одновременно привести в движение каретку 11 с гирокомпасом 5 на участке дуги изгиба направляющей 10 заданного радиуса. БДМПсССУ должен обеспечить разность частот вращения ведущих колес, контролируемых датчиками скорости 6, соответствующую движению машины при повороте заданного радиуса. В случае несоответствия разности частот вращения ведущих колес, заданному радиусу поворота, произвести настройку ССУ.
3) Режим увода машина от устойчивого прямолинейного движения.
Задать направляющей 10 дугу изгиба в горизонтальной плоскости требуемого радиуса, путем соответствующего размещения штативов 9 на основании. Включить стенд и установить неизменные обороты привода 2. При этом ручка управления поворотом 4 должна находиться в нейтральном положении, что соответствует режиму прямолинейного равномерного движения машины. Привести в движение каретку 11 с гирокомпасом 5 на участке дуги изгиба направляющей 10 заданного радиуса. Сигнал с гирокомпаса 5, поступающий в МБУ 7, позволяет выстроить фактическую траекторию движения машины и после сравнения её с заданной ручкой управления поворотом 4 сформировать коррекцию курса воздействием на сигнал управления электрогидрораспределителем 8. Таким образом, БДМПсССУ должен обеспечить разность частот вращения ведущих колес, контролируемых датчиками скорости 6, соответствующую корректировке траектории движения машины для обеспечения устойчивого прямолинейного движения. В случае несоответствия разности частот вращения ведущих колес, при корректировке заданного радиуса увода, произвести настройку ССУ.
4) Режим не управляемого заноса машины.
Включить стенд и установить неизменные обороты привода 2. Отклонить ручку управления поворотом 4 на величину, соответствующую заданному радиусу поворота машины. При этом каретка 11 с гирокомпасом 5 должна занимать неподвижное положение на направляющей 10, что соответствует режиму прямолинейного равномерного движения машины. БДМПсССУ должен обеспечить остановку вращения (торможение) ведущих колес. В случае отсутствия торможения ведущих колес, произвести настройку ССУ.
Таким образом, благодаря введению направляющей, с перемещением по ней гирокомпаса с акселерометром из состава ССУ, имеющего коммутацию с МБУ, получена возможность имитировать любую заранее заданную траекторию движения центра масс мобильной машины с БДМПсССУ. Все это позволяет выполнить настройку ССУ движением, а также обеспечить контроль основных параметров БДМП путем имитации в стационарных стендовых условиях входных воздействий на элементы ССУ, в максимальной степени соответствующих реальным условиям движения машины в пространстве, при одновременном снижении трудоемкости и стоимости этих работ, за счет исключения необходимости использования подвижных транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ПОВОРОТА МОБИЛЬНОЙ МАШИНЫ И СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫМ МЕХАНИЗМОМ ПОВОРОТА | 2019 |
|
RU2721207C1 |
| Дифференциальный механизм поворота мобильной машины и способ управления дифференциальным механизмом поворота | 2020 |
|
RU2805453C2 |
| Устройство управления исполнительным органом путевой машины | 1982 |
|
SU1023020A1 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
| Путевая машина | 1971 |
|
SU667622A1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ПРОВЕРКИ РАСКРЫТИЯ АЭРОДИНАМИЧЕСКОГО РУЛЯ РАКЕТЫ | 2008 |
|
RU2382348C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| Стенд для имитационного испытания системы управления беспилотным зерноуборочным комбайном | 2020 |
|
RU2728860C1 |
| СОЛНЕЧНЫЙ ФОТОЭЛЕКТРОГЕНЕРАТОР | 2022 |
|
RU2791962C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ЛИНЕЙНОГО ПОЛОЖЕНИЯ СЕДЕЛЬНО-СЦЕПНОГО УСТРОЙСТВА | 2009 |
|
RU2483963C2 |
Изобретение относится к испытательной технике. Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением мобильных машин содержит остов машины с приводом, размещенный на остове и связанный с приводом испытуемый бесступенчатый дифференциальный механизм поворота со следящей системой управления движением, включающей ручку управления поворотом, гирокомпас с акселерометром, датчики скорости вращения ведущих колес, микропроцессорный блок управления и электрогидрораспределитель. Стенд дополнительно снабжен направляющей в виде гибкого монорельса на штативах, установленной по внешнему контуру остова машины и бесступенчатого дифференциального механизма поворота. На направляющей установлена каретка с гирокомпасом и акселерометром из состава следящей системы управления. Каретка и гирокомпас коммутируются с микропроцессорным блоком управления. Расширяются функциональные возможности стенда. 1 ил.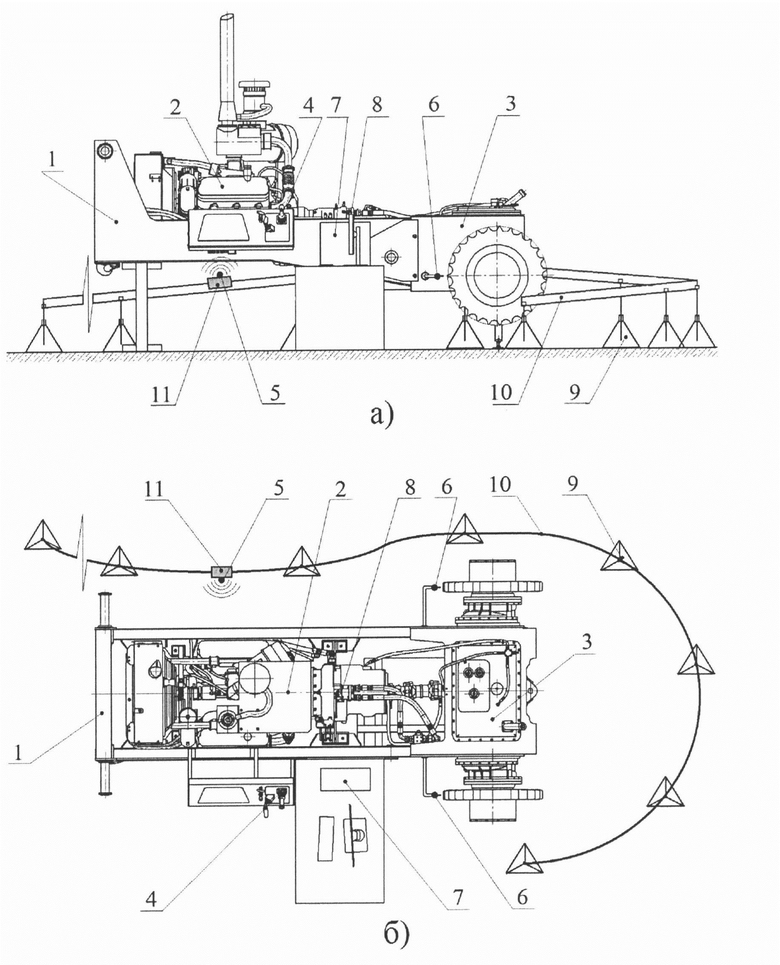
Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением мобильных машин, содержащий неподвижно установленный на основании остов машины с приводом, размещенный на остове и кинематически связанный с приводом испытуемый бесступенчатый дифференциальный механизм поворота со следящей системой управления движением, включающей ручку управления поворотом - командоконтроллер, гирокомпас с акселерометром, датчики скорости вращения ведущих колес, микропроцессорный блок управления и электрогидрораспределитель, отличающийся тем, что стенд дополнительно снабжен направляющей, выполненной в виде гибкого монорельса на штативах и установленной по внешнему контуру остова машины и бесступенчатого дифференциального механизма поворота, на направляющей установлена каретка с гирокомпасом и акселерометром из состава следящей системы управления, при этом каретка и гирокомпас выполнены с возможностью коммутации с микропроцессорным блоком управления.
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПЕРЕДАЧ | 1999 |
|
RU2153659C1 |
| Стенд для испытания ведущих мостов транспортных средств | 1988 |
|
SU1569643A1 |
| Стенд для испытания дифференциалов | 1980 |
|
SU917025A1 |
| СПОСОБ НАГРУЖЕНИЯ ЗУБЧАТЫХ ПЕРЕДАЧ, КАРДАННЫХ ВАЛОВ И МУФТ НА ИСПЫТАТЕЛЬНЫХ И ОБКАТОЧНЫХ СТЕНДАХ | 2002 |
|
RU2237235C2 |

