Изобретение относится к способам управления полетом маневренных летательных аппаратов (МЛА).
Оно может найти применение в летной практике при выполнении учебно-тренировочных полетов на пилотаж в процессе первоначального обучения курсантов авиационных училищ, освоении и применении летным составом новых способов и сpедств ведения ближнего воздушного боя, в процессе боевой подготовки летного состава авиации и в испытательных полетах при отработке летно-технических характеристик перспективных МЛА. Кроме того, оно может найти применение в спортивной авиации при выполнении фигур сложного и высшего пилотажа и при полетах летательного аппарата в космическое пространство.
Известные способы управления МЛА предусматривают в частности при ухудшении функционального состояния летчика выведение МЛА из сложного маневра в горизонтальный полет, причем все они основаны на участии летчика в процессе управления или включении с его помощью автоматического режима приведения к горизонту.
Однако полеты на МЛА сопровождаются воздействием на организм человека различных физических факторов, среди которых особую значимость имеют перегрузки.
Действие перегрузок на МЛА приводит к нарушению функционального состояния физиологических систем, чувствительности и взаимодействия анализаторов (органов чувств), течения основных нервных и психических процессов, а также может сопровождаться развитием утомления, переутомления и приводить к снижению качества профессиональной деятельности и пространственной ориентации летчика в полете.
В таких случаях исход полета во многом определяется аэродинамическими характеристиками МЛА, его положением в пространстве и параметрами полета. В процессе неуправляемого полета под действием аэродинамических факторов не исключена возможность выхода летательного аппарата из сложного положения (маневра), выравнивания его и временной стабилизации, в результате чего уменьшается величина перегрузок и работоспособность человека может восстановиться.
Известен способ управления МЛА, позволяющий существенно повысить безопасность полета на больших углах атаки и включающий измерение параметра полета (угла атаки αист ), сравнение его с допустимым значением этого параметра ( αдоп ) и при превышении углом α своего допустимого значения формирование импульса на сигнализатор на штурвале. По этому сигналу летчик должен принять меры для перевода МЛА на эксплуатационный угол атаки. Если же самолет по какой-либо причине не выходит на данный режим, принудительно отклоняется штурвал на уменьшение угла α и удерживается в отклоненном положении до возвращения самолета на эксплуатационный режим полета.
Целью изобретения является повышение безопасности полета при кратковременной потере летчиком работоспособности при воздействии перегрузок.
Это достигается тем, что при способе управления МЛА, включающем автоматическое выведение ЛА из сложного маневра в горизонтальный полет, в каждый момент времени измеряют вертикальную перегрузку, действующую на ЛА, определяют функциональное состояние летчика и при одновременном достижении вертикальной перегрузкой заданного порогового значения и наличии сигнала о потере летчиком работоспособности, формируют сигнал на автоматическое приведение ЛА в горизонтальный полет, действующий до момента восстановления работоспособности летчика.
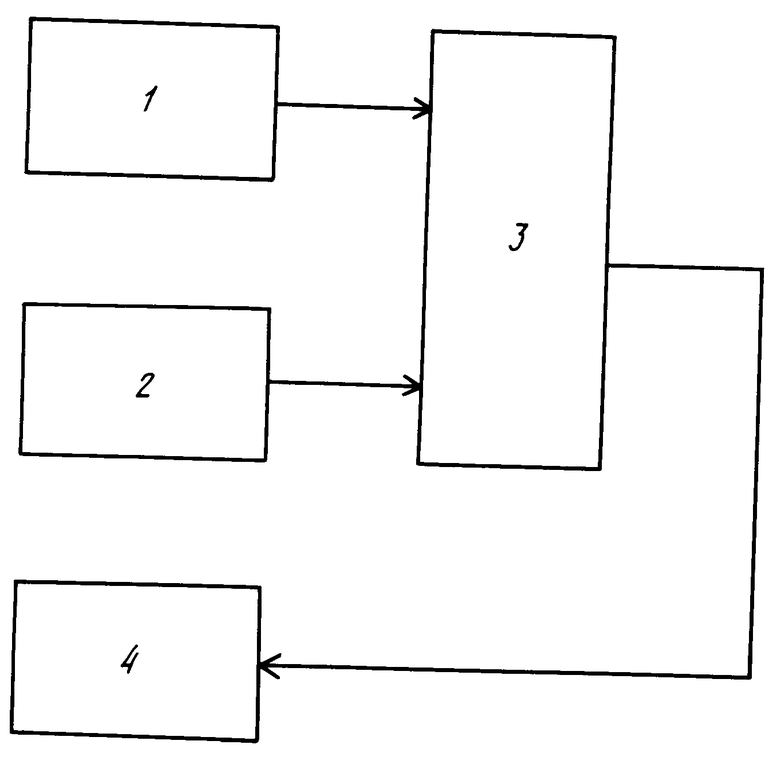
На чертеже приведена упрощенная функциональная схема системы управления, позволяющей реализовать предлагаемый способ.
Система управления содержит измеритель 1 вертикальной перегрузки, выполненный, например, на базе датчика линейных ускорений, прибор 2, регистрирующий функциональное состояние летчика, например датчик мышечных усилий, прилагаемых летчиком в органам управления, блок 3 формирования аварийного сигнала и систему 4 автоматического приведения МЛА к горизонту.
При выполнении сложного маневра ЛА под воздействием перегрузок летчик может на короткое время потерять работоспособность вследствие ухудшения состояния здоровья или потери сознания и при этом непроизвольно снять руки (ноги) с органов управления или существенно ослабить мышечные усилия на них. При одновременном наличии сигнала с измерителя 1, несущего информацию о величине перегрузки, опасной (-Gz ≥ -2 ед; + Gz ≥ 4 ед) для функционального состояния человека, и сигнала с прибора 2, несущего информацию в частности об отсутствии усилия на органах управления или об уменьшении его ниже допустимого предела, в блоке 3 формируется аварийный сигнал, который поступает в систему 4 и включает ее, благодаря чему осуществляется выведение МЛА из сложного положения в горизонтальный полет. Автоматическое выведение ЛА в горизонтальный полет и управление им в горизонтальном полете будет осуществляться до тех пор, пока не появится сигнал о восстановлении работоспособности человека - оператора, в частности о наличии соответствующего усилия на органах управления. После этого управление МЛА будет осуществляться летчиком либо вручную, либо автоматически в заданном им режиме.
Таким образом, предлагаемый функционально-адаптивный способ управления МЛА повышает безопасность полета, так как позволяет избежать летного происшествия при кратковременной потере летчиком работоспособности под воздействием перегрузок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| СПОСОБ ОБУЧЕНИЯ ЛЕТЧИКОВ ВЫПОЛНЕНИЮ ФИГУР ПИЛОТАЖА | 1991 |
|
RU2018972C1 |
| Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления | 2015 |
|
RU2607305C1 |
| СПОСОБ УСТАНОВЛЕНИЯ ФАКТА ПОТЕРИ СОЗНАНИЯ ЛЕТЧИКОМ В РЕЗУЛЬТАТЕ ВОЗДЕЙСТВИЯ ПЕРЕГРУЗОК | 1992 |
|
RU2072948C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2249540C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2009 |
|
RU2385823C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ СОСТОЯНИЯ ЛЕТЧИКА В УСЛОВИЯХ ВОЗДЕЙСТВИЯ ПИЛОТАЖНЫХ ПЕРЕГРУЗОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2111698C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601367C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС САМОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570339C1 |
| ПИЛОТАЖНЫЙ СТЕНД НАЗЕМНОГО КОМПЛЕКСА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ЛЕТЧИКА К ВЫПОЛНЕНИЮ ПОЛЕТОВ НА САМОЛЕТЕ-ИСТРЕБИТЕЛЕ | 2003 |
|
RU2249856C1 |
Изобретение относится к способам управления полетом маневренных летательных аппаратов. Цель изобретения - повышение безопасности полета при воздействии перегрузок. Способ заключается в определении вертикальной перегрузки, сравнении ее с допустимым значением, определении функционального состояния летчика и при одновременном достижении вертикальной перегрузкой заданного порогового значения и наличии сигнала о потере летчиком работоспособности, формировании сигнала на автоматическое приведение ЛА в горизонтальный полет до момента восстановления работоспособности летчика. 1 ил.
СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, заключающийся в определении параметра полета, сравнении его с допустимым и формировании сигнала на принудительное приведение летательного аппарата в заданное положение, отличающийся тем, что, с целью повышения безопасности полета при кратковременной потере летчиком работоспособности при воздействии перегрузок, определяют функциональное состояние летчика, в качестве параметра полета используют вертикальную перегрузку и при одновременном достижении вертикальной перегрузкой заданного порогового значения и наличии сигнала о потере летчиком работоспособности формируют сигнал на автоматическое приведение летательного аппарата в горизонтальный полет, действующий до момента восстановления работоспособности летчика.
| Котик М.Г | |||
| и Филиппов В.В | |||
| Полет на предельных режимах | |||
| М.: Мин.обороны, 1977, с.235-236. |
