Заявляемое изобретение относится к способам автоматического управления пространственным маневрированием самолета при ограниченной тяге силовой установки.
Известен способ управления полетом самолета, обеспечивающий управление посредством автомата тяги, реализующий полет по заданным программным траекториям с выдерживанием предельных скоростей полета при выполнении вертикальных маневров [1].
Недостатком известного способа является то, что он, предусматривая раздельное, не связанное, функционирование системы ограничительных сигналов, выдающей экипажу сигналы о приближении к предельно-допустимой скорости полета, и системы траекторного управления, не обеспечивает безопасности полета по всем возможным профилям маневрирования при автоматическом управлении, что сужает область его применения.
Так, при полете по траекториям, не заданным программно, например, в режиме стабилизации угла тангажа при выполнении маневра “Горка”, невыход самолета за ограничение по минимально-допустимой скорости полета при ограниченной (конечной) тяге силовой установки не гарантируется. Экипаж вынужден вмешиваться в управление для изменения угла тангажа в целях поддержания скорости полета или, в случае ошибочных действий, выполнять маневр ухода в ручном режиме после срабатывания командной сигнализации системы ограничительных сигналов, при запаздывании на реакцию которой может произойти выход самолета за эксплуатационные ограничения по скорости полета.
Целью изобретения является устранение указанных недостатков и обеспечение безопасности полета по всем возможным профилям маневрирования в эксплуатационной области разрешенных скоростей полета при автоматическом траекторном управлении самолетом.
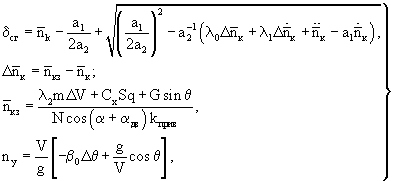
Поставленная цель достигается за счет того, что согласно предлагаемому способу управления полетом самолета при пространственном маневрировании с использованием автомата тяги управление скоростью полета и углом наклона траектории осуществляют в соответствии с алгоритмом
где δсг - отклонение рукоятки сектора газа;
 - относительная частота вращения компрессора;
- относительная частота вращения компрессора;
а1, a2 - постоянные числовые коэффициенты, характеризующие динамические свойства двигателя;
λ0, λ1 - постоянные числовые коэффициенты, определяемые скоростью отработки заданного значения относительной частоты вращения двигателя;
 - отклонение относительной частоты вращения компрессора от заданного значения;
- отклонение относительной частоты вращения компрессора от заданного значения;
 - первая производная от отклонения относительной частоты вращения компрессора;
- первая производная от отклонения относительной частоты вращения компрессора;
 - вторая производная от отклонения относительной частоты вращения компрессора;
- вторая производная от отклонения относительной частоты вращения компрессора;
 - заданное значение относительной частоты вращения компрессора;
- заданное значение относительной частоты вращения компрессора;
λ2 - постоянный числовой коэффициент, определяющий скорость отработки заданной скорости полета;
m - масса самолета;
ΔV - отклонение скорости полета от заданного значения;
Сх - безразмерный коэффициент аэродинамических сил относительно оси ОХ связанной системы координат;
S - площадь крыла самолета;
q - скоростной напор воздушного потока;
G - вес самолета;
θ - угол наклона траектории;
N - количество двигателей;
α - угол атаки самолета;
αдв - угол заклинения двигателя;
kприв - коэффициент приведения;
nу - нормальная перегрузка;
V - скорость полета;
g - ускорение свободного падения;
β0 - постоянный числовой коэффициент, определяющий скорость отработки заданного значения угла наклона траектории;
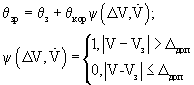
Δθ - отклонение угла наклона траектории от заданного значения, причем, если при выполнении маневра для поддержания заданной скорости полета тяги не хватает или она избыточна, корректируют угол наклона траектории, исходя из условий:


где θзр - заданное реализуемое значение угла наклона траектории;
θз - заданное значение угла наклона траектории;
θкор - сигнал коррекции угла наклона траектории;
ψ(ΔV,  ) - числовой коэффициент, значение которого зависит от рассогласования по скорости полета;
) - числовой коэффициент, значение которого зависит от рассогласования по скорости полета;
 - первая производная от скорости полета;
- первая производная от скорости полета;
Vз - заданное значение скорости полета;
Δдоп - допустимое рассогласование по скорости полета;
λθ -положительное число, определяющее темп изменения угла наклона траектории;
 - первая производная от заданной скорости полета;
- первая производная от заданной скорости полета;
nх - продольная перегрузка,
при этом если текущая скорость полета превышает заданную величину, то сначала силовую установку переводят в режим работы “малый газ”, а затем увеличивают угол наклона траектории, если текущая скорость при максимальной тяге становится меньше заданной, посредством системы управления полетом формируют сигнал на уменьшение угла наклона траектории.
Таким образом, управляемыми координатами в предлагаемом способе являются скорость полета V(t) и угол наклона траектории θ(t), а управлением - отклонение рукоятки сектора газа δсг и нормальная перегрузка ny(t). При управлении скоростью и углом наклона траектории используется один и тот же энергетический ресурс - тяга силовой установки, при ограниченности которой непосредственный синтез δсг(t) и ny(t) может приводить к конфликтным ситуациям в процессе реализации законов управления в полете. В связи с этим введено правило, позволяющее ограничить потребление общего энергетического ресурса одной из подсистем управления скоростью или управления углом наклона траектории:

где I - общий энергетический ресурс;
Iν- энергетический ресурс, потребляемый контуром управления скоростью полета;
Iθ - энергетический ресурс, потребляемый контуром управления углом наклона траектории;
0≤η≤1 - весовой коэффициент, позволяющий ограничить потребление энергетического ресурса одной из двух подсистем, который зависит только от рассогласования по скорости η=η(V-Vз), полагая, что система управления скоростью полета обладает высшим приоритетом при распределении общего ресурса тяги.
Вектор управления u=(δсг, ny) находится с помощью структурно-параметрического метода, ищется управление, обеспечивающее движение самолета с заданной скоростью Vз(t) и заданным углом наклона траектории θз(t) с минимумом функционала

при ограничении

которое является решением уравнения


В результате применения процедуры синтеза получено управление в принятых обозначениях:
Заданные значения Vз(t) и θз(t) являются до тех пор независимыми, пока хватает запаса по тяге двигателей. Если тяги не хватает (или она избыточна) для поддержания скорости полета, величина θз(t) корректируется, исходя из условий функционирования контура управления скоростью, а именно

На чертеже представлена структурная схема контура траекторного управления углом наклона траектории с учетом сохранения заданной скорости полета при выходе на ограничение по тяге силовой установки, иллюстрирующая функциональную зависимость сигнала управления и подтверждающая возможность реализации предлагаемого способа.
Контур управления скоростью полета V содержит последовательно соединенный сумматор 1, на первый вход которого поступает сигнал, соответствующий заданной скорости полета Vз, а на второй - сигнал, соответствующий текущему значению скорости полета V(t), контур 2 формирования заданной продольной перегрузки п
Контур управления углом наклона траектории θ содержит последовательно соединенные сумматор 5, на первый вход которого поступает сигнал, соответствующий заданному значению угла наклона траектории θз, а на второй - сигнал, соответствующий текущему значению угла наклона траектории θ(t), контур 6 формирования заданной нормальной перегрузки n
Контуры управления скоростью полета и углом наклона траектории функционально связаны между собой через контур 8 коррекции, который вырабатывает сигнал коррекции угла наклона траектории θкор, определяющий ту часть энергии, которую необходимо передать контуру управления скоростью полета от контура управления углом наклона траектории. Знак θкор определяет контур, которому и передается энергия.
Заданное реализуемое значение угла наклона траектории θзр, сохраняющего заданную скорость полета, имеет вид:

Если θз и Vз задаются согласованно, то есть потребные энергетические ресурсы соответствуют располагаемым, оба контура функционируют независимо друг от друга. При несогласованном задании θз и Vз для случая снижения заданная скорость полета ограничивается предельно-допустимой максимальной скоростью полета. Если текущая скорость полета превышает Vз, то силовая установка последовательно переводится в режим работы “малый газ”, а затем увеличивается угол наклона траектории, в результате чего сохраняется равенство V(t)=Vз(t). В режиме набора высоты возникает обратная ситуация. Здесь потребные ресурсы могут превышать располагаемые. Поэтому если текущая скорость при максимальной тяге становится меньше заданной, то система управления полетом формирует сигнал на уменьшение угла наклона траектории для поддержания заданной скорости полета.
Таким образом, на примере технической реализации показана возможность формирования автоматического траекторного управления самолетом, функционально гарантирующим безопасность маневрирования в эксплуатационной области разрешенных скоростей полета.
Источники информации
1. А.А.Красовский, Ю.А.Вавилов, А.И.Сучков. Системы автоматического управления летательными аппаратами. М.: Наука, 1986, стр.248-265, 309-314.
2. Г.С.Бюшгенс, Р.В.Студнев. Динамика самолета. Пространственное движение. М.: Машиностроение, 1983.
3. Прикладная теория управления, оценивания и идентификации. Научно-методические материалы. Под ред. Ю.А.Кочеткова. М., Издание ВВИА им.проф. Н.Е.Жуковского, 1986.
4. Авиация. Энциклопедия. Научное издательство “БОЛЬШАЯ РОССИЙСКАЯ ЭНЦИКЛОПЕДИЯ”. М., Центральный аэрогидродинамический институт им. проф. Н.Е.Жуковского, 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2255024C2 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВОЗВРАТЕ НА КОРАБЛЬ | 2011 |
|
RU2450312C1 |
| СПОСОБ УПРАВЛЕНИЯ СХОДОМ КОСМИЧЕСКОГО АППАРАТА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2013 |
|
RU2559430C2 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЁТОМ ДЛЯ РЕАЛИЗАЦИИ АВТОМАТИЧЕСКОГО ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ТЯЖЁЛЫХ ГРУЗОВ | 2021 |
|
RU2775957C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЁТА САМОЛЁТА С УЧЕТОМ СТАБИЛИЗАЦИИ СКОРОСТИ | 2018 |
|
RU2689054C1 |
| Способ авиационно-космического выведения на околоземную орбиту малых искусственных спутников | 2018 |
|
RU2724001C2 |
Изобретение относится к способам автоматического управления пространственным маневрированием самолета при ограниченной тяге силовой установки. Согласно данному способу управления скоростью полета V(t) и углом наклона траектории θ(t) осуществляют в соответствии с алгоритмом, синтезирующим величины отклонения рукоятки сектора газа δсг и нормальной перегрузки nу(t) с учетом ограничений по тяге и параметрам движения при использовании всех органов управления самолета, необходимых для реализации допустимых траекторий полета и работающих синхронно. Если при выполнении маневра для поддержания заданной скорости полета тяги не хватает или она избыточна, корректируют величину угла наклона траектории, исходя из условий функционирования контура управления скоростью, при этом контур управления скоростью обладает высшим приоритетом при распределении общего ресурса тяги. Технический результат - повышение безопасности полета по всем возможным профилям маневрирования в эксплуатационной области разрешенных скоростей полета при автоматическом траекторном управлении самолетом. 1 ил.
Способ управления полетом самолета при пространственном маневрировании с использованием автомата тяги, отличающийся тем, что управление скоростью полета и углом наклона траектории осуществляют в соответствии с алгоритмом
где δcг - отклонение рукоятки сектора газа;
 - относительная частота вращения компрессора;
- относительная частота вращения компрессора;
а1, a2 - постоянные числовые коэффициенты, характеризующие динамические свойства двигателя;
λ0, λ1 - постоянные числовые коэффициенты, определяемые скоростью отработки заданного значения относительной частоты вращения двигателя;
 - отклонение относительной частоты вращения компрессора от заданного значения;
- отклонение относительной частоты вращения компрессора от заданного значения;
 - первая производная от отклонения относительной частоты вращения компрессора;
- первая производная от отклонения относительной частоты вращения компрессора;
 - вторая производная от отклонения относительной частоты вращения компрессора;
- вторая производная от отклонения относительной частоты вращения компрессора;
 - заданное значение относительной частоты вращения компрессора;
- заданное значение относительной частоты вращения компрессора;
λ2 - постоянный числовой коэффициент, определяющий скорость отработки заданной скорости полета;
m - масса самолета;
ΔV - отклонение скорости полета от заданного значения;
Сх - безразмерный коэффициент аэродинамических сил относительно оси ОХ связанной системы координат;
S - площадь крыла самолета;
q - скоростной напор воздушного потока;
G - вес самолета;
θ - угол наклона траектории;
N - количество двигателей;
α - угол атаки самолета;
αдв - угол заклинения двигателя;
kприв - коэффициент приведения;
nу - нормальная перегрузка;
V - скорость полета;
g - ускорение свободного падения;
β0 - постоянный числовой коэффициент, определяющий скорость отработки заданного значения угла наклона траектории;
Δθ - отклонение угла наклона траектории от заданного значения, причем, если при выполнении маневра для поддержания заданной скорости полета тяги не хватает или она избыточна, корректируют угол наклона траектории, исходя из условий:

где θзр - заданное реализуемое значение угла наклона траектории;
θз - заданное значение угла наклона траектории;
θкор - сигнал коррекции угла наклона траектории;
ψ(ΔV,  ) - числовой коэффициент, значение которого зависит от рассогласования по скорости полета;
) - числовой коэффициент, значение которого зависит от рассогласования по скорости полета;
 - первая производная от скорости полета;
- первая производная от скорости полета;
Vз - заданное значение скорости полета;
Δдоп - допустимое рассогласование по скорости полета;
λθ - положительное число, определяющее темп изменения угла наклона траектории;
 - первая производная от заданной скорости полета;
- первая производная от заданной скорости полета;
nх - продольная перегрузка,
при этом если текущая скорость полета превышает заданную величину, то сначала силовую установку переводят в режим работы "малый газ", а затем увеличивают угол наклона траектории, если текущая скорость при максимальной тяге становится меньше заданной, посредством системы управления полетом формируют сигнал на уменьшение угла наклона траектории.
| КРАСОВСКИЙ А.А | |||
| и др | |||
| Системы автоматического управления летательными аппаратами | |||
| - М.: Наука, 1986, с.248-265, с.309-314 | |||
| ТАРАСОВ В.Г | |||
| Основы теории автоматизированных систем управления | |||
| - М.: ВВИА им | |||
| Н.Е.Жуковского, 1988, с.438 | |||
| RU 13104 U1, 20.03.2000 | |||
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |

