Изобретение относится к авиационной технике и предназначено для использования при подготовке в строевых частях летного состава.
Известно устройство для контроля деятельности оператора на авиационном тренажере, содержащее, в частности, задатчик эталонных характеристик и допусков, выходы которого подключены к входам графического дисплея и блока сравнения, тренажер, выполненный в виде блока цифровых входов, блока имитации системы управления вооружением и последовательно соединенных блоков потенциометров, аналого-цифрового преобразователя, блока тарировок, блока расчета параметров движения летательного аппарата и блока формирования зависимостей текущих параметров движения и управления, при этом выходы блока формирования зависимостей текущих параметров движения и управления, блока имитации системы управления вооружением и блока цифровых кодов подключены к входам графического дисплея и блока сравнения, выходы которого также подключены к входам графического дисплея (SU 1831958 А1, G 09 В 9/08, 10.05.1995).
Недостаток известного устройства связан с получением неполной информации о траектории движения самолета, что снижает достоверность представлений о пространственном положении при выполнении фигур высшего пилотажа.
Наиболее близким к предложенному является пилотажный тренажер летчика, содержащий кабину летчика, включающую оптико-коллимационное устройство индикации, акустическую систему, кресло летчика, приборную доску с пилотажно-навигационными приборами и индикаторами контроля режима работы авиадвигателей и органы управления управляющими поверхностями и авиадвигателями имитируемого летательного аппарата, вычислительную систему с персональной ЭВМ и систему информационного обмена (RU 94025128 A1, G 09 В 9/08, 10.09.1996).
Недостаток указанного устройства определяется невозможностью создания “образа полета”, что отрицательно сказывается на точности управления и безопасности полета.
Известны пилотажные стенды:
"Пилотажный тренажер летчика" (номер публикации 94025128, дата публикации 1996.09.10).
Описание изобретения к патенту "Способ контроля деятельности оператора на авиационном тренажере и устройство для его реализации". Авторское свидетельство СССР №1556393, кл. G 09 B 9/08, 1989.
RU 2018972 С1 (ИНСТИТУТ АВИАЦИОННОЙ МЕДИЦИНЫ), 30.08.1994.
US 6234799 B1 (AMERICAN GNC CORPORATION), 22.05.2001.
US 4419079 A (AVIONS MARSEL DASSAULT-BREGUET AVIATION), 06.12.1983.
WO 85/00912 A1 (THE COMMONWEALTH OF AUSTRALIA), 28.02.1985.
US 3924342 A (REDIFON LIMITED), 09.12.1975.
DE 3929581 A1 (BODENSEEWEK GERATETECHNIK GMBH), 07.03.1991.
RU 2156501 C1 (ПИНАЕВ С.А. и др.), 20.09.2000.
RU 2114460 C1 (Фирсов А.В. и др.), 27.06.1998.
Задачей изобретения является повышение эффективности обучения с облегчением проведения заданного маневра в реальных условиях.
Поставленная задача решается тем, что в пилотажном стенде наземного комплекса планирования и подготовки летчика к выполнению полетов на самолете-истребителе, содержащем кабину самолета с индикаторными приборами параметров движения и силовой установки, датчиками органов управления и системой визуализации пространственного движения самолета, а также вычислительную систему, включающую в себя первый модуль пространственного движения самолета, первый модуль динамики силовой установки и монитор, при этом вход первого модуля динамики силовой установки и первый вход первого модуля пространственного движения самолета связаны с датчиками органов управления, выход первого модуля пространственного движения самолета - с индикаторными приборами параметров движения и системой визуализации пространственного движения самолета, а выход первого модуля динамики силовой установки - со вторым входом первого модуля пространственного движения самолета и с индикаторными приборами параметров силовой установки, - в вычислительную систему введены модуль планирования полета с блоком начальных условий полета и заданного маневра и блоком законов регулирования рычагов управления, второй модуль пространственного движения самолета, второй модуль динамики силовой установки, модуль визуализации заданной траектории полета и модуль оценки качества выполнения летчиком полета, при этом вход второго модуля динамики силовой установки и первый вход второго модуля пространственного движения самолета связаны с блоком начальных условий полета и заданного маневра и блоком законов регулирования рычагов управления, выход второго модуля пространственного движения самолета - с индикаторными приборами параметров движения и системой визуализации пространственного движения самолета, а выход второго модуля динамики силовой установки - со вторым входом второго модуля пространственного движения самолета и с индикаторными приборами параметров силовой установки, выходы обоих модулей пространственного движения самолета и обоих модулей динамики силовой установки подключены к соответствующим входам модуля визуализации заданной траектории полета, выходы обоих модулей пространственного движения самолета соединены с соответствующими входами модуля оценки качества выполнения летчиком полета, а выходы модуля визуализации заданной траектории полета и модуля оценки качества выполнения летчиком полета подключены к монитору.
Решению поставленной задачи способствуют частные существенные признаки изобретения.
Каждый из модулей пространственного движения самолета включает в себя банк аэродинамических коэффициентов, блок системы дифференциальных уравнений, блок алгоритмов автоматизированного управления и блок приводов органов управления, при этом выходы банка аэродинамических коэффициентов и блока приводов органов управления подключены соответственно к первому и второму входам блока системы дифференциальных уравнений, выход блока системы дифференциальных уравнений соединен с входом блока алгоритмов автоматизированного управления, а выход блока алгоритмов автоматизированного управления подключен к первому входу блока приводов органов управления, объединенные вход банка аэродинамических коэффициентов и второй вход блока приводов органов управления являются первым входом модуля пространственного движения самолета, а третий вход и выход блока системы дифференциальных уравнений - соответственно вторым входом и выходом данного модуля.
Составные блоки модуля планирования полета и кабины связаны с модулями пространственного движения самолета и модулями динамики силовой установки через интерфейсный узел.
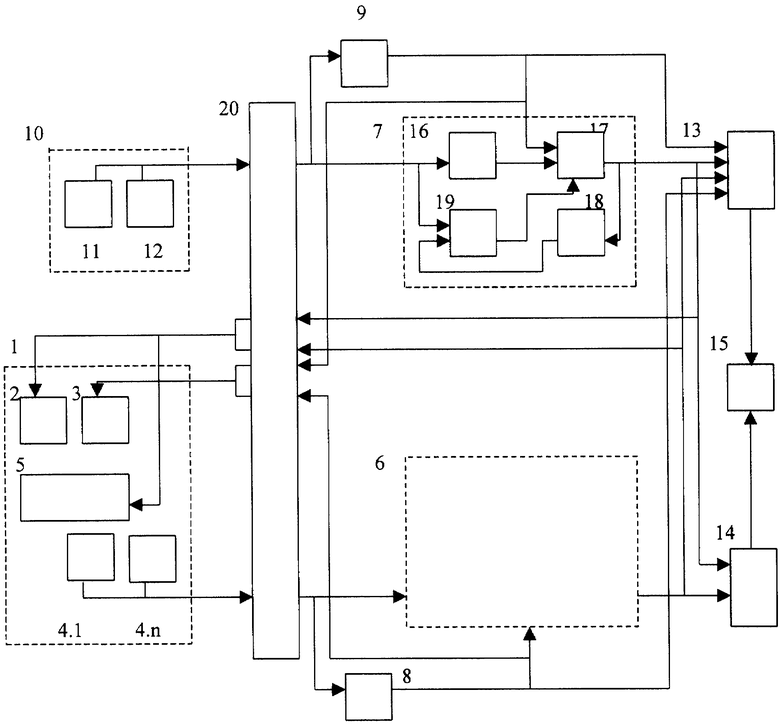
На чертеже представлена функциональная схема предложенного пилотажного стенда.
Пилотажный стенд содержит кабину 1 самолета с индикаторными приборами 2 параметров движения, индикаторными приборами 3 параметров силовой установки, датчиками 4.1-4.n органов управления и системой 5 визуализации пространственного движения самолета, а также вычислительную систему, включающую в себя первый модуль 6 и второй модуль 7 пространственного движения самолета, первый модуль 8 и второй модуль 9 динамики силовой установки, модуль 10 планирования полета с блоком 11 начальных условий полета и заданного маневра и блоком 12 законов регулирования рычагов управления, модуль 13 визуализации заданной траектории полета, модуль 14 оценки качества выполнения летчиком полета и монитор 15.
Вход первого модуля 8 динамики силовой установки и первый вход первого модуля 6 пространственного движения самолета связаны с датчиками 4.1-4.n органов управления, выход первого модуля 6 пространственного движения самолета - с индикаторными приборами 2 параметров движения и системой 5 визуализации пространственного движения самолета, а выход первого модуля 8 динамики силовой установки - со вторым входом первого модуля 6 пространственного движения самолета и с индикаторными приборами 3 параметров силовой установки. Вход второго модуля 9 динамики силовой установки и первый вход второго модуля 7 пространственного движения самолета связаны с блоком 11 начальных условий полета и заданного маневра и блоком 12 законов регулирования рычагов управления, выход второго модуля 7 пространственного движения самолета - с индикаторными приборами 2 параметров движения и системой 5 визуализации пространственного движения самолета, а выход второго модуля 9 динамики силовой установки - со вторым входом второго модуля 7 пространственного движения самолета и с индикаторными приборами 3 параметров силовой установки. Выходы модулей 6 и 7 пространственного движения самолета и модулей 8 и 9 динамики силовой установки подключены к соответствующим входам модуля 13 визуализации заданной траектории полета, выходы модулей 6 и 7 пространственного движения самолета соединены с соответствующими входами модуля 14 оценки качества выполнения летчиком полета, а выходы модуля 13 визуализации заданной траектории полета и модуля 14 оценки качества выполнения летчиком полета подключены к монитору 15.
Каждый из модулей 6 и 7 пространственного движения самолета включает в себя банк 16 аэродинамических коэффициентов, блок 17 системы дифференциальных уравнений, блок 18 алгоритмов автоматизированного управления и блок 19 приводов органов управления. Выходы банка 16 аэродинамических коэффициентов и блока 19 приводов органов управления подключены соответственно к первому и второму входам блока 17 системы дифференциальных уравнений. Выход блока 17 системы дифференциальных уравнений соединен с входом блока 18 алгоритмов автоматизированного управления. Выход блока 18 алгоритмов автоматизированного управления подключен к первому входу блока 19 приводов органов управления. Объединенные вход банка 16 аэродинамических коэффициентов и второй вход блока 19 приводов органов управления являются первым входом модулей 6 и 7 пространственного движения самолета, а третий вход и выход блока 17 системы дифференциальных уравнений - соответственно вторым входом и выходом модулей 6 и 7.
Составные блоки модуля 10 планирования полета и кабины 1 связаны с модулями 6 и 7 пространственного движения самолета и модулями 8 и 9 динамики силовой установки через интерфейсный узел 20.
Работа на пилотажном стенде осуществляется следующим образом.
Планирование полета составляется в соответствии с инструкцией по летной эксплуатации самолета и включает в себя полетное задание на выполнение маневра. Данный комплекс предназначен для подготовки в строевых частях летчиков к выполнению маневров при решении боевых задач и маневров высшего пилотажа. При планировании полета указываются все необходимые условия: временные зависимости для высоты полета Н, скорости полета V (числа М), курса полета ψ и временные зависимости для угловых координат и перегрузок.
Рассмотрим типы маневров, которые выполняются на пилотажном стенде и вносятся в программу модуля 10 планирования полетом.
1. Вираж (при установившихся или неустановившихся скоростях) с заданным углом крена γ .
Расчетные задания параметров заданного маневра определяются по формулам:
- радиус виража

где: nу - перегрузка в продольном канале,
g=9,8 м/сек2,
Vвир - [м/сек];
- скорость виража

где Vгп - скорость горизонтального полета по данной высоте;
- тяга двигателя на вираже
Рвир=Ргпny,
где Ргп - тяга двигателя при горизонтальном полете при Vгп на заданной высоте полета.
- мощность потребления для выполнения виража
Nв=Nгпny,
где Nгп - - мощность, потребная для горизонтального полета при Vв=const на данной высоте.
- время виража при развороте на угол курса Δ ψ

где: tвир [сек], Δ ψ - [рад]
2. Пикирование - полет самолета по крутой нисходящей траектории и выход из пикирования.
Основные расчеты значения для данного маневра:
- радиус кривизны траектории при входе в пикирование

где: θ - угол наклона траектории при пикировании,
θ =ϑ -α ,
ϑ - угол тангажа,
α - угол атаки;
- радиус кривизны при выходе из пикирования

где: V - среднее значение скорости полета,
nуср - среднее значение перегрузки,
θ 0 - установившейся угол наклона траектории при пикировании;
- потеря высоты
Δ H-Rcp(1-cosθ cp),
где Rcp- средний радиус кривизны траектории.
3. Горка - неустановившееся криволинейное движение самолета в вертикальной плоскости для быстрого набора высоты. Горка - основной вид маневра в вертикальной плоскости для самолета - истребителя.
Расчет основных параметров этого маневра аналогичен расчету при выполнении маневра пикирования.
4. Петля Нестерова (ПН) - неустановившееся движение самолета в вертикальной плоскости. ПН выполняется при условии, что скорость полета больше в 1,6-2,2 раза минимальной скорости самолета при работе силовой установки и не менее чем в 3 раза больше при выключенной силовой установке. При выполнении этого маневра внимание уделяется изменению скорости полета, т.к. по мере набора высоты при выполнении маневра скорость падает, в верхней точке петли она минимальна, а затем начинает возрастать. Основные параметры маневра определяются расчетом кривизны в разных точках петли:
- начало петли

- вход в петлю

- радиус кривизны при угле наклона траектории θ =90°

где V0 - скорость при θ =90° ;
- радиус кривизны в верхней точке петли

где Vвepx - скорость в верхней точке петли.
5. Боевой разворот - восходящий пространственный маневр, при котором угол разворота в горизонтальной плоскости составляет примерно 180° , угол наклона траектории примерно равен нулю. Боевой разворот может выполняется с различными изменениями угла крена. При расчете данного маневра определяют:
- угловую скорость в горизонтальной плоскости

- угловую скорость в вертикальной плоскости
- радиус кривизны траектории в вертикальной плоскости
- вертикальную скорость
Vy=Vsinθ ;
- горизонтальную скорость
Vx=Vcosθ .
6. Маневр в наклонной плоскости, составляющей с горизонтальной плоскостью двугранный угол ψ v (полет без скольжения, угол скольжения β =0).
Основные расчетные формулы:
- продольное ускорение
jnp=g(nx-sinψ vsinμ ),
где: μ - угол разворота в плоскости маневра,
nх - перегрузка в скоростной системе координат;
- угловая скорость поворота траектории в плоскости маневра (рад/с)

- вертикальная скорость
Vy=Vsinψ sinμ ;
- угол крена в различных точках траектории

Приведенные основные расчетные формулы даны для установившегося маневра и являются исходными данными для расчета закона регулирования по времени рычагов управления  движением самолета и закона управления ручкой тяги двигателя Хруд.
движением самолета и закона управления ручкой тяги двигателя Хруд.
В модуле планирования полета в зависимости от заданного маневра полета на основании проведенных расчетов вводятся законы регулирования:
Xpϑ(t), Xpγ(t), Хn(t) и Хруд(t).
Эти законы вводятся с учетом имеющихся ограничений для самолета по перегрузкам, предельному углу атаки, максимальной и минимальной скоростям полета, ограничению по числу М и минимальной высоты полета при выполнении маневра.
Эти зависимости вводятся для выполнения маневра как бы "идеальным летчиком", т.е. выполнение маневра проводится без участия летчика, который проходит подготовку к полету.
Для выполнения маневра "идеальным летчиком" выход модуля планирования 10 (выходы блоков 11 и 12) включен на вход второго модуля 7 пространственного движения самолета и на вход второго модуля 9 динамики силовой установки.
С выхода второго модуля 7 пространственного движения самолета сигналы поступают на вход модуля 13 визуализации заданной траектории движения самолета, который формирует силуэт самолета и его пространственную траекторию на экране - мониторе, а также выдает на экран монитора 15 текущие координаты движения самолета либо в виде графиков, либо в цифровом виде.
Одновременно сигналы с выхода второго модуля пространственного движения 7 поступают через интерфейсный узел 20 на индикаторные приборы 2 параметров движения в кабине 1 летчика.
Сигнал модуля 10 планирования полета также поступает на вход второго модуля 7 динамики силовой установки, в котором формируется сигнал тяги двигателя в зависимости от заданного положения. Тяга двигателя выдается с учетом динамики силовой установки в зависимости от режима работы (приемистость, дросселирование, малый газ, максимал, малый форсаж, форсаж, полный форсаж и условия полета по высоте и скорости).
В общем виде тяга двигателя определяется как
P=f(Xpyg, H, V)· W(p)
где W(P) - учитывает динамику силовой установки и представляется в виде:

где: T1, Т2, ξ 2 - зависят от условий полета по Н и V и режима работы силовой установки,
τ - при включении режима форсаж, на других режимах τ =0.
Сигнал с выхода второго модуля 9 динамики силовой установки поступает на вход второго модуля 7 пространственного движения самолета (на блок 17 системы дифференциальных уравнений) для решения дифференциального уравнения для V. Одновременно с выхода второго модуля 9 динамики силовой установки сигналы через интерфейсный узел 20 поступают на индикаторные приборы 3 отображения параметров силовой установки.
Все параметры движения самолета и силовой установки в модуле 13 визуализации заданной траектории полета запоминаются, при этом имеется возможность на каждом участке времени изменить масштаб изображения и сдвинуть картинку по времени в любую сторону.
Летчик, который проходит подготовку, может наблюдать действия "идеального летчика" (действия по программе модуля 10 планирования полета) и соответствующую траекторию полета, а также движение самолета относительно его центра тяжести.
После того как летчик принял решение самому управлять самолетом, он включает систему и осуществляет полет с выполнением заданного маневра. В этом случае сигналы с датчиков 4.1-4.n органов управления в кабине 1 летчика поступают через интерфейсный узел 20 на первые модули 6 и 8 пространственного движения самолета и динамики силовой установки, выходные сигналы которых запоминаются в модуле 13 визуализации заданной траектории полета аналогично работе с "идеальным летчиком". Кроме того, параметры пространственного движения (пилотажно-навигационные параметры) самолета, пилотируемого летчиком, поступают на соответствующие индикаторные приборы 2, а параметры силовой установки - на соответствующие индикаторные приборы 3.
Характеристики модулей 6 и 7 пространственного движения самолета и модулей 8 и 9 динамики силовой аналогичны. Наличие двух идентичных модулей объясняется тем, что иногда целесообразно совместить работу реального и "идеального" летчиков.
После выполнения планируемого полетного задания летчик имеет возможность совместить на экране монитора - траекторию "идеального летчика" и траекторию своего полета, а также вывести на экран монитора 15 выходные сигналы модуля 14 оценки качества выполнения летчиком полета.
Анализируя траектории движения, летчик имеет возможность оценить свои действия, при этом его анализ подкрепляется количественной оценкой модуля 14 оценки качества выполнения летчиком полета, т.к. на всем участке траектории выдаются количественное значение ошибки и величина допуска на ошибку.
Особое внимание уделяется на изменение полета по курсу и высоте. Если по оценке качества управления управление выполнено неудовлетворительно, то летчик повторяет полеты и вновь оценивает качество выполнения маневра.
По отзывам летчиков данный пилотажный стенд наземного комплекса планирования позволяет создать "образ" полета, что значительного облегчает летчику проведение заданного маневра в реальных условиях, повысить точность управления, а также обеспечить безопасность полета при выполнении сложного маневра на малых высотах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПИЛОТАЖНЫЙ СТЕНД МАНЕВРЕННОГО САМОЛЕТА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ОГРАНИЧИТЕЛЕМ ПРЕДЕЛЬНЫХ РЕЖИМОВ | 2020 |
|
RU2753025C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759057C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759058C1 |
Изобретение относится к авиационной технике и предназначено для использования при обучении и подготовке летного состава к выполнению маневров при решении боевых задач и маневров высшего пилотажа. Стенд содержит кабину самолета с индикаторными приборами параметров движения и силовой установки, датчиками органов управления и системой визуализации пространственного движения самолета, а также вычислительную систему, включающую в себя два модуля пространственного движения самолета, два модуля динамики силовой установки, модуль планирования полета с блоком начальных условий полета и заданного маневра и блоком законов регулирования рычагов управления, модуль визуализации заданной траектории полета, модуль оценки качества выполнения летчиком полета и монитор. Планирование полета составляется в соответствии с инструкцией по летной эксплуатации самолета и включает в себя полетное задание на выполнение маневра. При планировании указываются высота, скорость, курс полета и момент по времени выполнения заданного маневра. Стенд позволяет создать "образ" полета, что облегчает летчику проведение заданного маневра в реальных условиях, повысить точность управления и обеспечить безопасность полета при выполнении сложного маневра на малых высотах. 2 з.п. ф-лы, 1 ил.
| RU 94025128 А1, 10.09.1996 | |||
| СПОСОБ КОНТРОЛЯ ДЕЯТЕЛЬНОСТИ ОПЕРАТОРА НА АВИАЦИОННОМ ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1831958A3 |
| US 6234799 B1, 22.05.2001 | |||
| DE 3929581 A1, 07.03.1991. | |||

