Изобретение относится к системам управления, в частности к системам, обеспечивающим перехват приоритетных целей (ПЦ), сопровождаемых истребителями охранения.
К ПЦ относятся авиационные комплексы радиолокационного дозора и наведения (АКРЛДН) [1], самолеты-ретрансляторы, самолеты-топливозаправщики, постановщики помех, а также самолеты стратегической, дальней и военно-транспортной авиации, уничтожение которых может нанести значительный ущерб информационному, материальному и боевому обеспечению противоборствующей стороны.
Основными летно-тактическими показателями ПЦ являются постоянные (в основном, дозвуковые) скорости, высота полета до 12…13 км, большая продолжительность полета, а также большие размеры, масса и, соответственно, большая эффективная поверхность отражения [2]. Набор этих показателей делает ПЦ легко обнаруживаемыми и идентифицируемыми летательными аппаратами (ЛА), не представляющими особой сложности для поражения. В связи с этим, несмотря на то, что ПЦ выполняют свои функции в основном над своей территорией на значительном удалении от условной линии боевого соприкосновения, для их защиты выделяются значительные силы истребителей охранения, которые могут барражировать на некотором расстоянии от охраняемых объектов.
Эта особенность предопределяет для перехватчика ПЦ необходимость решения как минимум двух задач, включающих преодоление противодействия истребителей охраны и обеспечение условий применения ракет «воздух-воздух» большой дальности действия. Наиболее рациональным способом решения указанных задач является использование координированного наведения на ПЦ разноудаленных истребителей с разных сторон с заданными временными расстановками [3, 4].
Результатом такого наведения является привлечение наибольшего вниманий охраны к первым группам перехватчиков с целью создания секторов, свободных от защищающих истребителей, в которые будут направлены следующие группы с пуском ракет большой дальности.
Следует подчеркнуть, что вывод перехватчиков в зоны применения ракет является сложной задачей, решение которой зависит от конкретной расстановки истребителей охранения и перехватчиков. При этом необходимо отметить, что ракеты «воздух-воздух» большой дальности действия [5, 6] с радиусом поражения более ста километров и скоростью полета, в полтора-два раза превышающей скорость полета истребителей, достаточно просто идентифицируются среди других ЛА, а достаточно большое время их полета, достигающие нескольких минут [6], дает возможность принять действенные меры по их уничтожению.
В связи с этим необходимо принимать специальные меры по предотвращению поражения этих ракет средствами истребителей охранения и ПВО.
Основным средством уничтожения ракет-перехватчиков (РП), наводимых на ПЦ являются ракеты истребителей охранения. В связи с этим становится весьма актуальной задача реализации более сложных законов управления ракетой-перехватчиком ПЦ, которые наряду с решением основной задачи ее поражения обеспечивали бы уклонение от ракет противника [7] и их выделение (селекцию) среди плотной группы истребителей охранения [8].
Задача этапа уклонения состоит в реализации такой траектории полета перехватчика ПЦ, которая приводит к возрастанию ошибок и срыву ее сопровождения РЛС головки самонаведения противника, лишая методы наведения его ракет информационного обеспечения, а, соответственно, и возможности поражения перехватчика ПЦ. Среди возможных вариантов таких траекторий следует назвать траектории, при которых в некоторых пределах изменяются направления полета и содержащие производные поперечных составляющих скорости разных знаков [9].
Таким образом, задачей изобретения является разработка способа формирования сигнала управления РП, обеспечивающего высокоточное, устойчивое наведение на ПЦ и уклонение от ракет противника.
В общем случае процесс перехвата ПЦ должен включать в себя три этапа, показанные на фиг. 1.
На первом этапе наведения (участке АВ) РП движется по траектории, обеспечивающей срыв ее сопровождения радиолокационными и оптико-электронными системами противника.
На втором этапе (участке ВС) выполняется полет по криволинейной траектории, обеспечивающей селекцию ПЦ в составе группы истребителей охранения Иi, реализуемую на основе алгоритмов траекторного управления наблюдением [8].
На третьем этапе (конечном участке CD) обеспечивается наведение в упрежденную точку встречи (УТВ) с ПЦ, реализующее минимальный промах.
В качестве прототипа изобретения использовался метод последовательных упреждений [5]
где jт - поперечное ускорение перехватчика;
 и
и  - оценки требуемого и текущего бортового пеленга цели;
- оценки требуемого и текущего бортового пеленга цели;
 - оценка угловой скорости линии визирования;
- оценка угловой скорости линии визирования;
 и
и  - оценки дальности до цели и скорости ее изменения;
- оценки дальности до цели и скорости ее изменения;
Kϕ и Kω - коэффициенты передачи ошибок управления Δϕ=ϕт-ϕ и Δω=ω;
VpTp - дальность пуска ракеты.
Недостатком прототипа является прямолинейная траектория на этапе наведения РП на ПЦ, что позволяет истребителям сопровождения высокоэффективно наводиться на нее. Устранение этого недостатка достигается тем, что в закон управления прототипа добавляется компонента, задающая квазигармонический характер движения РП со случайной амплитудой и периодом на начальном участке траектории перехвата ПЦ, который и приводит к срыву сопровождения перехватчика летательными аппаратами охранения ПЦ.
Технический результат, который может быть получен от использования предлагаемого изобретения, заключается в реализации перехвата ПЦ за счет обеспечения высокой точности и устойчивости сопровождения ПЦ и срыва наведения истребителей сопровождения на РП.
Сущность предлагаемого изобретения заключается в том, что величина сигнала управления поперечным ускорением РП определяется взвешенной суммой ошибок сопровождения по бортовому пеленгу, требуемое значение которого определяется углом упреждения, обеспечивающим наведение в наивыгоднейшую УТВ [5], и угловой скорости, и квазигармонической составляющей, амплитуда и период которой являются псевдослучайными процессами.
При предлагаемом способе поперечное ускорение ракеты-перехватчика ПЦ формируется следующим образом.
1. Формируется ряд возможных периодов квазигармонической составляющей Т, вероятность смены периода и начальная фаза квазигармонической составляющей ξ0.
2. На каждом такте управления выбирается значение периода квазигармонической составляющей и по выражению (3) пересчитывается фаза:

Здесь
Ti - выбранное значение периода квазигармонической составляющей;
ΔT - период формирования сигналов управления.
В дальнейшем опустим зависимость от k.
3. Расчет требуемого угла упреждения [5]:

4. Формирование сигнала управления:

Здесь V - скорость РП.
На больших расстояниях, когда Д  , а ω мала, второе слагаемое в (5) пренебрежимо мало и практически не оказывает влияния на процесс наведения, который определяется первым и третьим слагаемыми, обеспечивающими полет по квазигармонической траектории относительно направления на УТВ.
, а ω мала, второе слагаемое в (5) пренебрежимо мало и практически не оказывает влияния на процесс наведения, который определяется первым и третьим слагаемыми, обеспечивающими полет по квазигармонической траектории относительно направления на УТВ.
Когда Д≤Дпред и ξ≈0, необходимо перейти к другому методу наведения, легко согласуемого с предлагаемым, например, можно обнулить третье слагаемое, тем самым получая метод последовательных упреждений. Анализ алгоритма позволяет сделать следующие выводы.
1. В состав оптимизируемой системы управления должны входить оптимальные фильтры, формирующие оптимальные оценки  ,
,  ,
,  ,
,  , и регулятор, вычисляющий сигнал управления (5).
, и регулятор, вычисляющий сигнал управления (5).
2. Пересчет фазы через приращения обеспечивает непрерывность фазы квазигармонической составляющей, что позволяет избежать появления углов траектории.
3. С точки зрения информационного обеспечения рассмотренный способ (3)-(5) не накладывает ограничений на возможность его реализации, поскольку требуется иметь типовой набор оценок углов, угловых скоростей, дальности и скорости сближения, используемых в различных методах наведения.
На фиг. 2 представлен вариант структурной схемы системы сопровождения цели с использованием предлагаемого способа, где
1 - измерители, формирующие наблюдения;
2 - фильтр, принимающий на вход сигналы наблюдений и формирующий оценки бортового пеленга ПЦ  и его производной
и его производной , дальности до цели
, дальности до цели  и ее производной
и ее производной  ;
;
3 - усилитель, получающий на вход сигнал  и усиливающий его с коэффициентом Kϕ;
и усиливающий его с коэффициентом Kϕ;
4 - усилитель, получающий на вход  и усиливающий его с коэффициентом Kω;
и усиливающий его с коэффициентом Kω;
5 - блок расчета квазигармонической составляющей;
6 - сумматор, получающий на вход сигналы ,
,  ,
,  и формирующий сигнал управления jт (5);
и формирующий сигнал управления jт (5);
7 - перехватчик;
8 - цель.
Исследование предлагаемого метода наведения (5) проводилось моделированием траектории ПЦ, движущейся со скоростью VПЦ=250 м/с, траектории РП, движущейся со скоростью VРП=700 м/с по закону (5) или (1), и летательных аппаратов охранения (ЛАО) ПЦ, в качестве которых рассматривались либо истребители, движущиеся со скоростью VИ1,2=350 м/c, либо пущенные ими ракеты, движущиеся со скоростью VР1,2=700 м/с.
В качестве показателей эффективности рассматривались текущие промахи и текущие перегрузки РП в процессе ее наведения на ПЦ, а также текущие ошибки сопровождения РЛС ЛАО в процессе наведения на РП.
Исследования предлагаемого способа перехвата проводились в три этапа.
На первом этапе предлагаемый способ сравнивался с прототипом при прочих равных условиях, где в качестве ЛАО выступала ракета, с присущими ей характеристиками: скорость - VР=700 м/с, постоянной времени угломеров - ТP1,2=1с ширина диаграммы направленности угломеров - ΘР=12°.
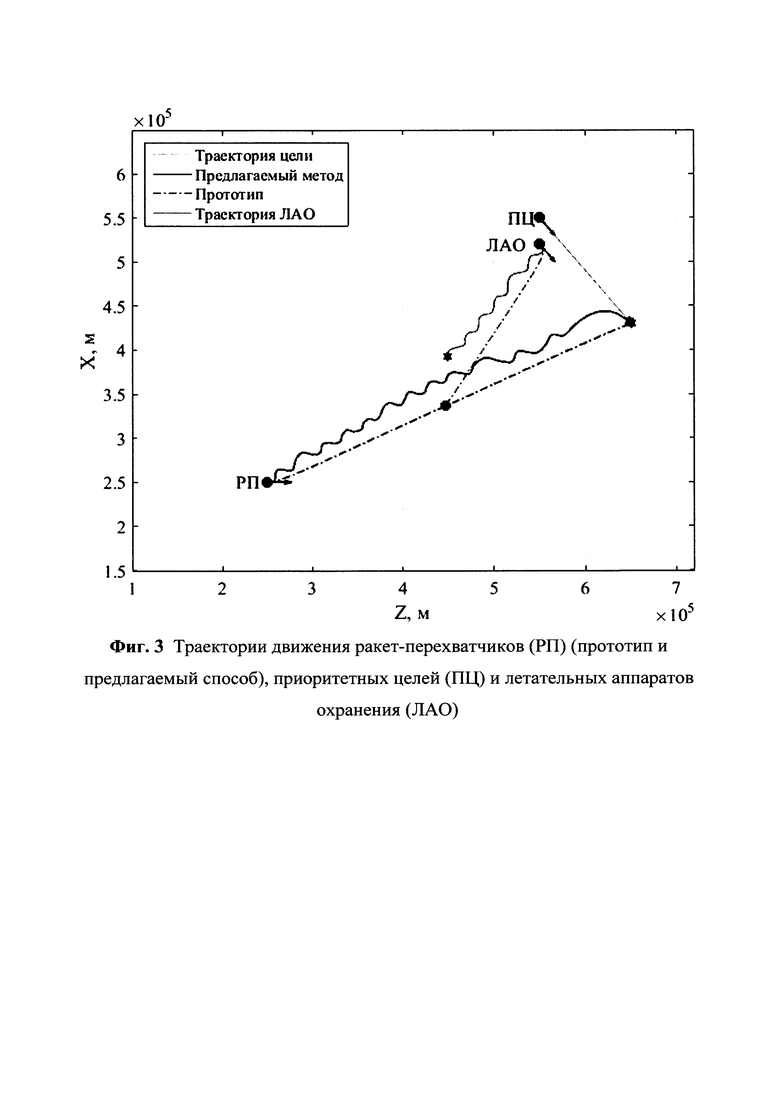
На фиг. 3 показаны траектории РП, ЛАО и ПЦ, где светло серая линия характеризует движение ПЦ, черными линиями - траектории РП, а темно серые линии принадлежат траекториям ЛАО. Сплошные линии принадлежат предлагаемому способу и наводимому на него ЛАО, а штрихпунктирные -прототипу.
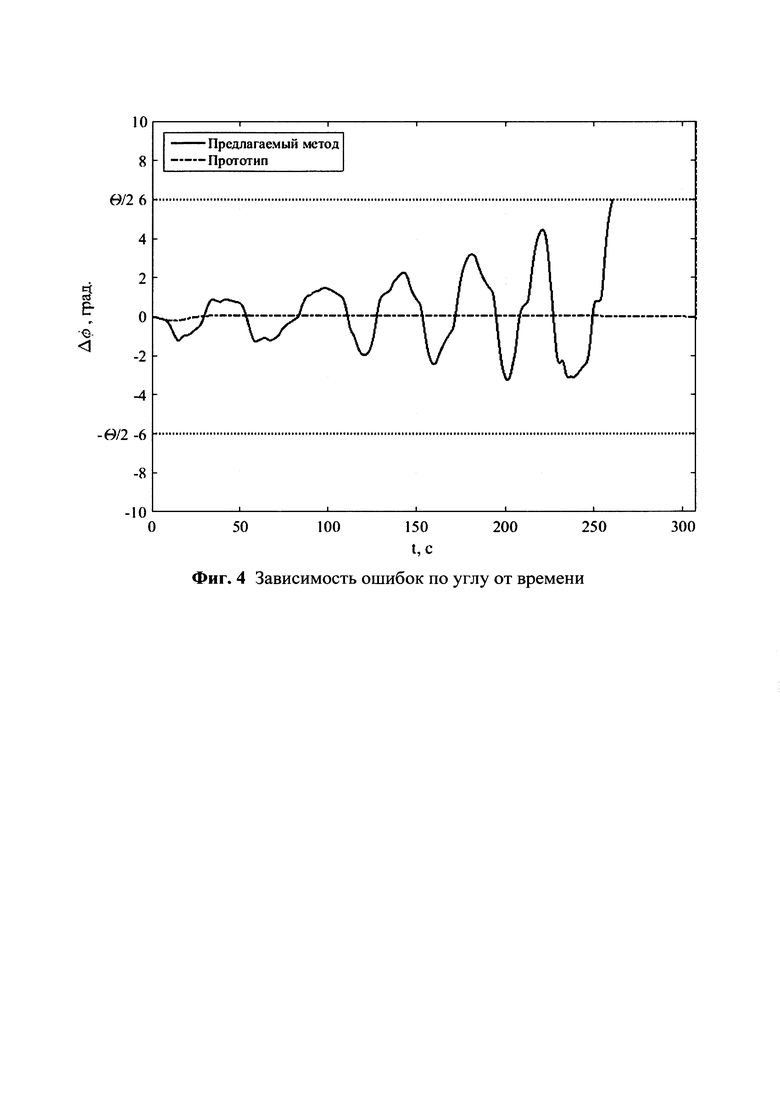
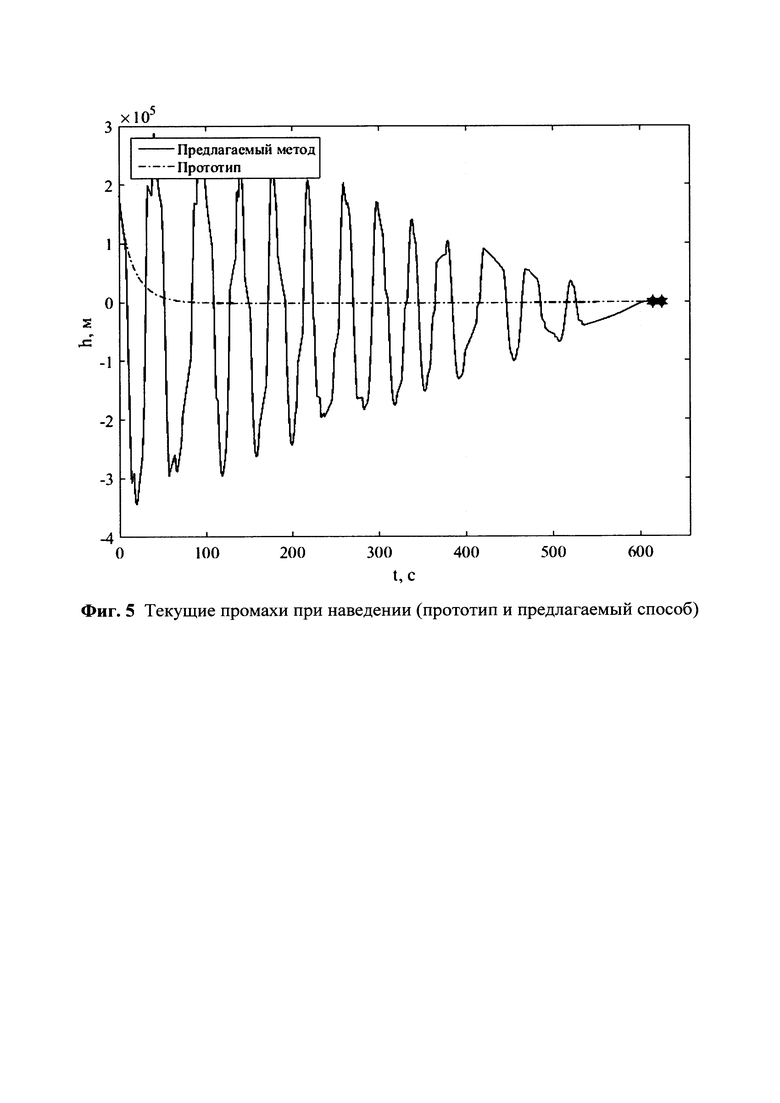
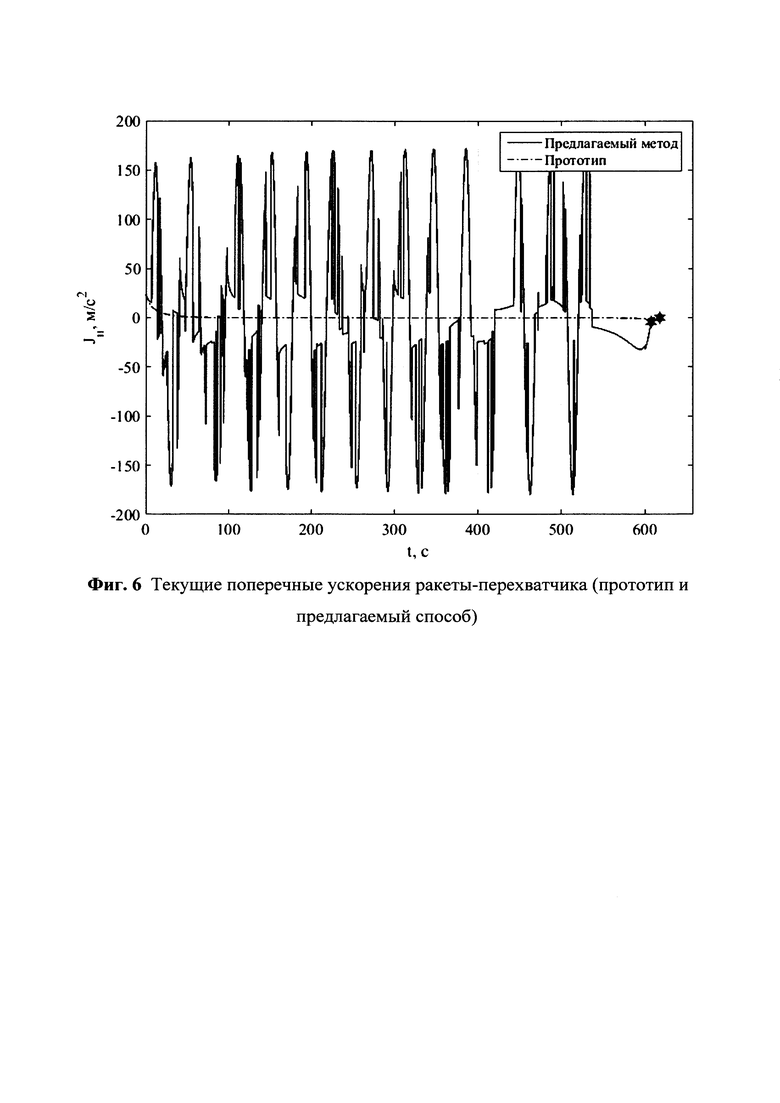
Фигуры 4, 5 и 6 отображают ошибки по углу угломера ЛАО, текущие промахи и поперечные ускорения РП соответственно для ситуации, показанной на фиг. 3. На фиг. 4 серыми пунктирными линиями ограничена зона устойчивого сопровождения ±Θ/2.
Из фигур видно, что предлагаемый способ, как и прототип (пунктирные линии на фигурах), обеспечивает перехват ПЦ с высокой точностью, но также приводит к срыву инерционных угломеров истребителей сопровождения, лишая их методы наведения информационного обеспечения. При этом поперечные ускорения не выходят за пределы допустимых значений, что говорит о возможности применения способа для летательных аппаратов с различной устойчивостью к перегрузкам. Из-за перехода на малых дальностях к методу последовательных упреждений происходит минимизация конечного промаха.
На втором этапе исследовалась ситуация, где в качестве ЛАО используются ракеты, наводящиеся на РП по методу пропорционального наведения [5]

где  - угловая скорость, поступающая с выхода его следящего угломера;
- угловая скорость, поступающая с выхода его следящего угломера;
N0 - навигационный параметр,
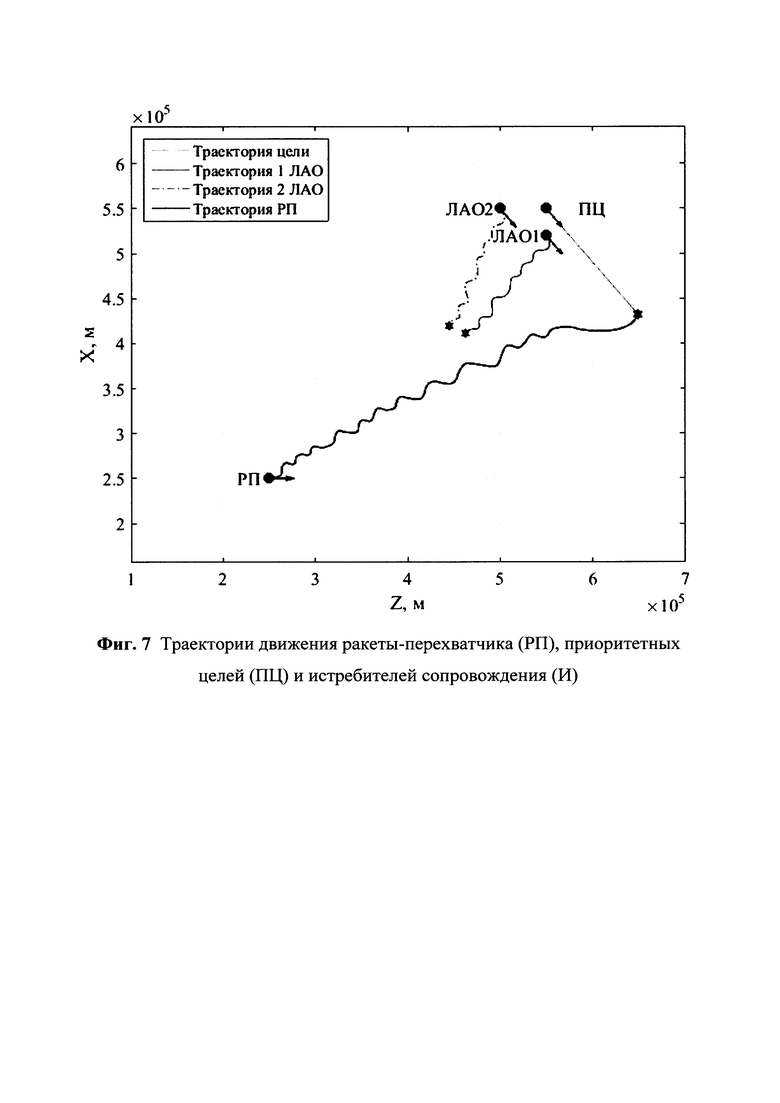
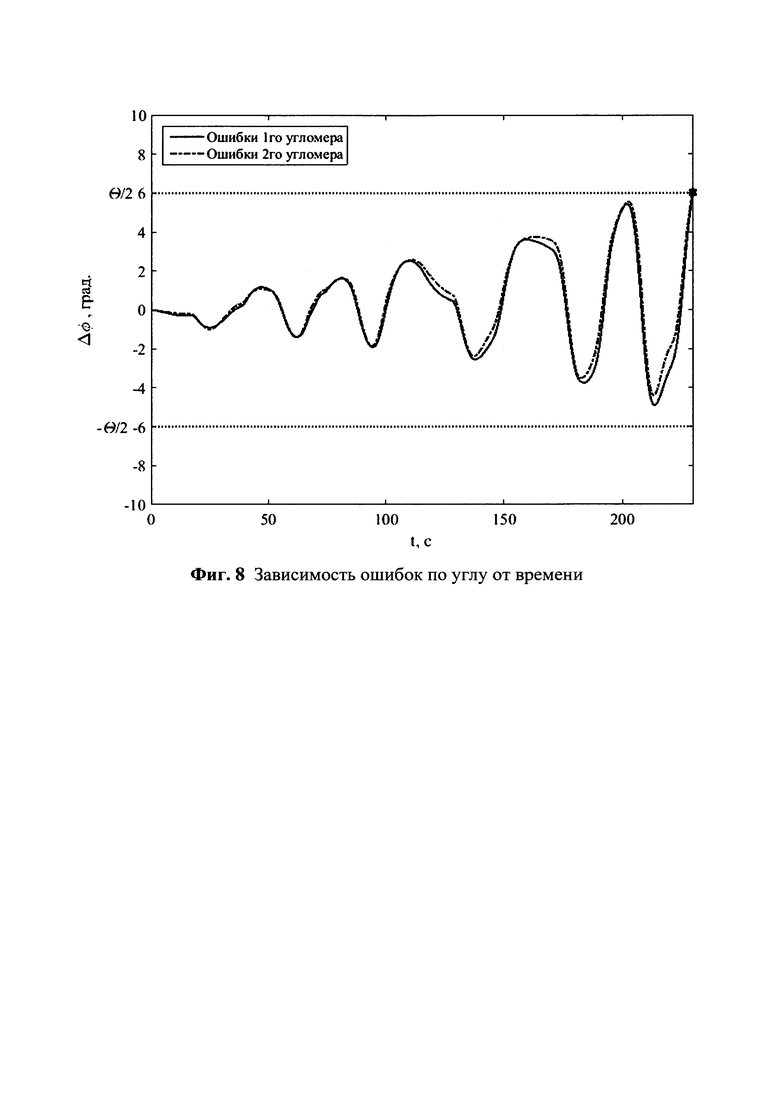
движущиеся со скоростью VP1,2=700 м/с, при условии, что в состав их радиолокационных головок самонаведения входят угломеры с постоянными времени ТР1,2=1с и шириной диаграммы направленности Θр=12°. В состав моделируемой системы входили 2 ЛАО, разноудаленных от РП и расположенных между РП и ПЦ. На фиг. 7 показаны траектории РП (черная линия), обеих ракет (темно-серные линии) и ПЦ (светло-серая линия), а на фиг. 8 - графики зависимостей ошибок по углу угломеров ЛАO1 (сплошная линия) и ЛАO2 (штрихпунктирная линия) от времени при наведении на РП для ситуации, рассмотренной на данном этапе.
Из фигур видно, что предложенный способ инвариантен к положению истребителей сопровождения, но наиболее эффективен на средних и малых дальностях. Способ обеспечил срыв инерционных угломеров истребителей сопровождения, наводящихся по методу пропорционального наведения.
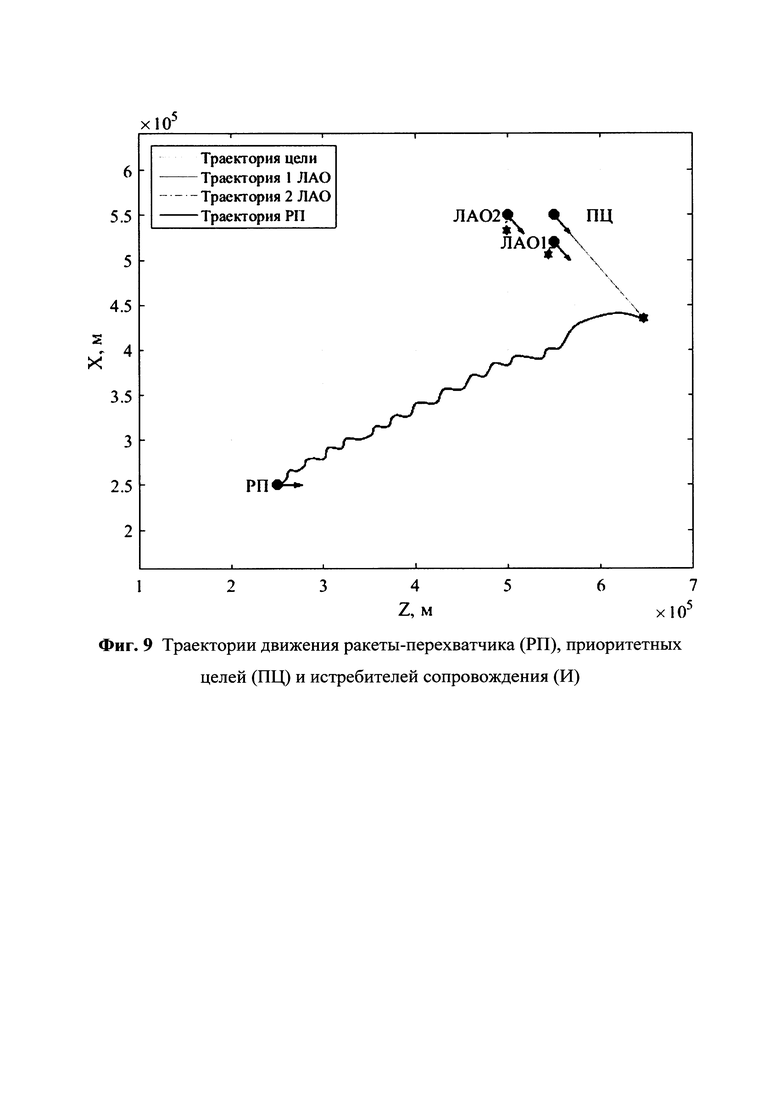
На третьем этапе исследовалась ситуация, когда в качестве ЛАО использовались два истребителя, наводящиеся в наивыгоднейшую упрежденную точку встречи [5]

движущихся со скоростью VИ1,2=350 м/с, при условии что в них используется РЛС, в состав которых входят следящий угломер с постоянной времени ТИ1,2=1с и антенна, формирующая диаграмму направленности шириной ΘИ=4°.
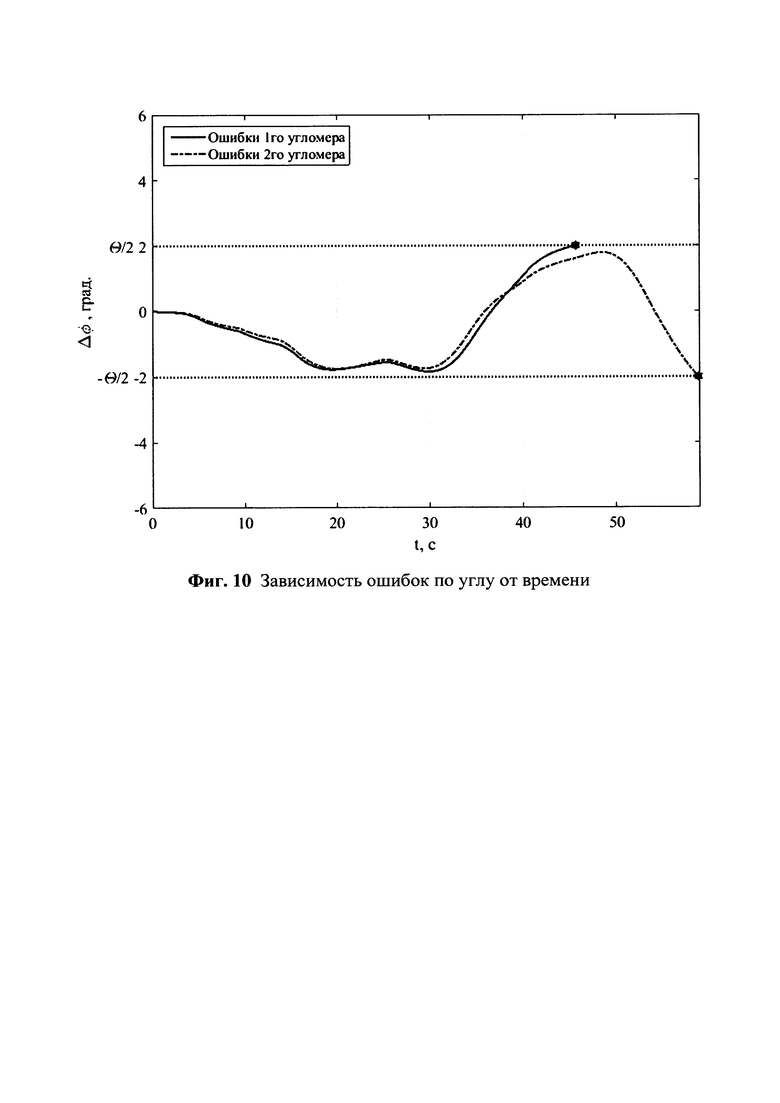
На фиг. 9 показаны траектории ракеты-перехватчика (черная линия), истребителей (темно-серные линии) и приоритетной цели (светло-серая линия), а на фиг. 10 - графики зависимостей ошибок по углу угломеров ЛАО1 (сплошная линия) и ЛАО2 (штрихпунктирная линия) от времени при наведении на РП для ситуации, отображенной на фиг. 9.
Из фигур видно, что способ обеспечил срыв угломеров истребителей сопровождения, наводящихся в наивыгоднейшую УТВ, и оказался более эффективен по сравнению с наведением истребителей по методу пропорционального наведения.
Проведенные исследования позволяют сделать вывод, что способ
- эффективен против истребителей сопровождения, наводящихся по разнообразным законам;
- инвариантен к положению истребителей сопровождения;
- обеспечивает минимизацию конечного промаха при наведении на ПЦ;
- не накладывает ограничений на возможность его реализации, поскольку для его реализации требуется иметь типовой набор оценок углов, угловых скоростей, дальности и скорости сближения, используемых в различных методах наведения.
Перечень использованных источников
1. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Принципы построения. Проблемы разработки и особенности функционирования. - М.: Радиотехника. 2014. - 528 с.
2. Дудник П.И., Ильчук А.Р., Кондратенков Г.С. и др. Авиационные радиолокационные комплексы и системы. / Под ред. П.И. Дудника. - М.: Изд-во ВВИА им. проф. Н.Е. Жуковского. 2006. - 1112 с.
3. Меркулов В.И., Пляшечник А.С. Групповое целераспределение воздушных объектов с учетом их приоритетов. // Полет. 2017. №3, №4.
4. Верба B.C., Меркулов В.И., Пляшечник А.С. Согласованное управление разноудаленными летательными аппаратами с заданной временной расстановкой вывода на движущийся объект. // Информационно-измерительные и управляющие системы. 2015. №8.
5. Авиационные системы радиоуправления: учебник для военных и гражданских ВУЗов. / Под ред. В.И. Меркулова. - М.: Изд-во ВВИА им. проф. Н.Е. Жуковского. 2008. - 423 с.
6. Авиация ПВО России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня и завтра. / Под ред. Е.А. Федосова. - М.: Дрофа. 2005. 815 с.
7. Авиационные системы радиоуправления. Т.3. Системы командного радиоуправления. Автономные и комбинированные системы наведения. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника 2004. - 320 с.
8. Меркулов В.И. Улучшение системных показателей бортовой РЛС за счет траекторного управления наблюдением. // Журнал радиоэлектроники. 2012. №1. URL=http://jre.cplire.ru/jre/jan12/index.html.
9. Меркулов В.И., Дрогалин В.В., Миляков Д.А. Проблемы перехвата гиперзвуковых целей. // Фазотрон. 2012. №3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перехвата интенсивно маневрирующих высокоскоростных воздушно-космических объектов | 2017 |
|
RU2666069C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ НАВЕДЕНИЯ НА ВЫСОКОСКОРОСТНЫЕ ВЫСОКОМАНЕВРЕННЫЕ ВОЗДУШНЫЕ ОБЪЕКТЫ | 2020 |
|
RU2751378C1 |
| СПОСОБ ПЕРЕХВАТА ВОЗДУШНЫХ ЦЕЛЕЙ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2012 |
|
RU2498342C1 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСТРЕБИТЕЛЕМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ ЕГО БЛИЖНЕМ НАВЕДЕНИИ НА ГРУППОВУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2015 |
|
RU2593911C1 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
| Способ наведения инерционного летательного аппарата с учетом несоответствия динамических свойств цели и перехватчика | 2019 |
|
RU2727777C1 |
Изобретение относится к системам управления, в частности к системам, обеспечивающим перехват приоритетных целей (ПЦ), сопровождаемых истребителями охранения. Технический результат заключается в повышении точности и устойчивости сопровождения ПЦ и обеспечивает срыв наведения ее истребителей сопровождения на ракету-перехватчик (РП) приоритетной цели. В заявленном способе в фильтре угломерного канала формируют оптимальные оценки текущего бортового пеленга цели и его первой производной по времени, требуемого бортового пеленга цели, а в фильтре дальномерного канала - оптимальную оценку дальности до цели и ее первой производной по времени, после чего на основе сформированных оценок формируют сигнал управления требуемым поперечным ускорением, при этом дополнительно на каждом такте управления пересчитывают фазу квазигармонической составляющей, после чего формируют модифицированный сигнал управления. 10 ил.
Способ перехвата приоритетной цели (ПЦ), обеспечивающий срыв наведения истребителей сопровождения, заключающийся в том, что на ракете-перехватчике (РП) в фильтре угломерного канала формируют оптимальные оценки текущего бортового пеленга цели  и его первой производной по времени
и его первой производной по времени  , требуемого бортового пеленга цели
, требуемого бортового пеленга цели  , а в фильтре дальномерного канала - оптимальную оценку дальности до цели
, а в фильтре дальномерного канала - оптимальную оценку дальности до цели  и ее первой производной по времени
и ее первой производной по времени  , после чего на основе сформированных оценок по закону
, после чего на основе сформированных оценок по закону
формируют сигнал управления требуемым поперечным ускорением jт РП, где
 и
и  - оценки требуемого и текущего бортового пеленга цели;
- оценки требуемого и текущего бортового пеленга цели;
 - оценка угловой скорости линии визирования;
- оценка угловой скорости линии визирования;
 и
и  - оценки дальности до цели и скорости ее изменения;
- оценки дальности до цели и скорости ее изменения;
Kϕ и Kω - коэффициенты передачи ошибок управления Δϕ=ϕт-ϕ,
отличающийся тем, что дополнительно на каждом такте управления пересчитывают фазу квазигармонической составляющей
где Тi - выбранное значение квазигармонической составляющей из ряда возможных значений,
ΔT - период формирования сигналов управления,
k - такт времени,
после чего модифицированный сигнал  управления формируют на основе сформированного значения jт по правилу
управления формируют на основе сформированного значения jт по правилу
где V - скорость РП,
далее сформированный сигнал управления  передают в систему автоматического управления РП для изменения ее ориентации в пространстве.
передают в систему автоматического управления РП для изменения ее ориентации в пространстве.
| Способ перехвата интенсивно маневрирующих высокоскоростных воздушно-космических объектов | 2017 |
|
RU2666069C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572079C2 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на самолёт из состава их пары по его функциональному назначению по принципу "ведущий-ведомый" | 2019 |
|
RU2695762C1 |
| US 5938148 A1 17.08.1999. | |||

