Область техники, к которой относится изобретение
Изобретение относится к радиоэлектронным системам самонаведения и может быть использовано для наведения летательных аппаратов (ЛА), оснащенных радиолокатором с синтезированием апертуры (РСА), на наземные цели.
Уровень техники
В интересах наведения ЛА на заданную наземную цель вне зависимости от погодных условий и освещенности целесообразно использовать бортовые радиолокационные станции (РЛС) с высокой пространственной разрешающей способностью. Высокая разрешающая способность РЛС по азимуту достигается в режиме фокусированного синтезирования апертуры антенны при переднебоковом обзоре целей. При неизменных технических параметрах РЛС постоянство разрешающей способности по азимуту может быть обеспечено только при наведении ЛА на цель по криволинейной траектории.
Известен способ [1] пропорционального наведения ЛА со смещением, в котором используются измерения координат цели, полученные РСА. Его сущность состоит в обеспечении вращения вектора скорости ЛА в направлении вращения линии визирования цели с большей угловой скоростью. При использовании этого способа траектория наведения ЛА в горизонтальной плоскости связанной системы координат формируется за счет сигнала управления (параметра рассогласования) Δг в виде

где N0 - навигационный параметр;
Vсб - скорость сближения ЛА с целью;
ωг - угловая скорость линии визирования цели;
Δωгт - требуемое смещение угловой скорости линии визирования цели;
k - коэффициент, определяющий точность наведения и стабилизацию линейного разрешения РСА;
λ - длина волны зондирующего сигнала;
ΔF - полоса пропускания доплеровских фильтров приемника РСА;
δх - требуемое линейное разрешение в горизонтальной плоскости;
jг - текущее значение бокового ускорения ЛА.
В интересах оптимизации траектории наведения ЛА навигационный параметр выбирают в соответствии с выражением
где Д0, Дk - дальности до цели в момент начала и окончания управления.
Недостатком данного способа является плохая управляемость на большом удалении, когда угловая скорость линии визирования цели мала. Кроме того, наведение ЛА указанным способом приводит к спрямлению его траектории вдоль линии визирования цели, вследствие чего не обеспечивается постоянство линейной разрешающей способности по азимуту. Это приводит к снижению точности наведения на малоразмерную цель.
В [2] описан способ, в котором с помощью РСА измеряют бортовой пеленг ϕг и угловую скорость линии визирования цели ωг в горизонтальной плоскости, дальность Д и скорость сближения с ней Vсб, а с помощью навигационной системы путевую скорость Vп, угол сноса ас и боковое ускорение jг наводимого ЛА. Исходя из требуемого линейного разрешения δхт, текущей дальности Д, путевой скорости Vп ЛА, полосы пропускания доплеровских фильтров ΔF и длины волны зондирующего сигнала λ РСА определяют требуемые значения бортового пеленга ϕгт и угловой скорости линии визирования цели ωгт, после чего формируют сигнал управления Δг в горизонтальной плоскости в виде
где Kϕ, Kω - коэффициенты передачи ошибок по бортовому пеленгу и угловой скорости линии визирования цели;
qϕ и qω - коэффициенты штрафов за точность наведения по бортовому пеленгу и угловой скорости линии визирования цели в горизонтальной плоскости;
qJ - коэффициент штрафа за величину управляющего сигнала.
Недостатком способа являются ненулевые ошибки управления в установившемся режиме (после окончания переходных процессов) и отсутствие обоснованного правила выбора коэффициентов штрафов qϕ, qω и qJ.
Известен способ наведения ЛА на цель [3] по дуге окружности с постоянным линейным разрешением РСА по азимуту δxт. Согласно способу одновременно измеряют горизонтальные бортовой пеленг ϕг, угловую скорость линии визирования ωг цели и дальность до нее Д. Определяют значения путевой скорости Vп и бокового ускорения ЛА jг. Исходя из требуемого линейного разрешения δхт, дальности до цели Д0 в точке начала самонаведения (перехода на дугу окружности), путевой скорости ЛА Vп, времени когерентного накопления сигналов Тс и длины волны зондирующего сигнала λ РСА рассчитывают требуемый бортовой пеленг цели
Требуемые значения бортового пеленга ϕгт цели и угловой скорости линии ее визирования при выводе ЛА к точке начала самонаведения и непосредственно на траектории самонаведения определяется в соответствии с выражениями
Алгоритм траекторного управления ЛА, соответствующий данному способу, описывается выражениями
где qϕ и qω - штрафы за ошибки управления по бортовому пеленгу и угловой скорости линии визирования цели;
Kϕ, Kω - коэффициенты передачи ошибок по бортовому пеленгу и угловой скорости линии визирования цели;
Д, Д0 - текущая дальность до цели и дальность в точке вывода на дугу окружности.
Недостатком данного способа, как и способа [2], являются ненулевые ошибки управления в установившемся режиме (после окончания переходных процессов) и отсутствие обоснованного правила выбора коэффициентов штрафов qϕ, qω. Кроме того, не учитываются ограничения на величину управляющего сигнала.
Наиболее близким по технической сущности к заявляемому способу является способ наведения ЛА на наземную цель, обеспечивающий адаптивный выбор коэффициентов передачи ошибок управления по бортовому пеленгу и угловой скорости линии визирования цели без предварительного моделирования [4]. Его сущность заключается в том, что в каждой точке траектории ЛА оценивают текущие значения бокового ускорения ЛА jг, его путевой скорости Vп, дальности до цели Д, бортового пеленга ϕг и угловой скорости линии ее визирования ωг в горизонтальной плоскости;
задают требуемые значения бортового пеленга цели и угловой скорости линии ее визирования в горизонтальной плоскости по формулам
где ϕгт - требуемый бортовой пеленг цели;
ωгт - требуемая угловая скорость линии визирования цели;
Vп - путевая скорость ЛА;
Д - дальность до цели;
Двкл - дальность включения РСА;
λ - длина волны зондирующего сигнала РСА;
Тс - время когерентного накопления сигналов РСА;
δхт - требуемая линейная разрешающая способность РСА
рассчитывают ошибки управления ЛА по бортовому пеленгу Δϕг и угловой скорости линии визирования Δϕг в виде разности требуемых значений и текущих оценок;
рассчитывают требуемое боковое ускорение ЛА в горизонтальной плоскости как взвешенную сумму ошибок управления по бортовому пеленгу и угловой скорости линии визирования по формуле

где Т - время дискретизации;
формируют параметр рассогласования как разность между требуемым и текущим боковыми ускорениями ЛА по формуле
Δ=jгт-jг.
Описанный алгоритм траекторного управления ЛА синтезирован в дискретном времени с использованием упрощенного локального квадратичного функционала качества, в котором не учитывается штраф за величину управляющего сигнала.
Коэффициенты штрафов за ошибки управления по бортовому пеленгу и угловой скорости линии визирования зависят от дисперсии ошибки выдерживания заданного разрешения РСА по азимуту и не оптимальны с точки зрения качества переходных процессов. Это может привести к перерегулированию, росту интегральной ошибки управления и интенсивности управляющего сигнала.
Раскрытие сущности изобретения
Целью изобретения является оптимизация закона траекторного управления ЛА с РСА в горизонтальной плоскости для повышения качества переходных процессов (уменьшения перерегулирования и колебательности управления), при ограничении на величину располагаемого бокового ускорения и обеспечения минимального промаха.
Указанный результат достигается:
- разделением траектории наведения ЛА на два участка. Первый участок соответствует движению ЛА по прямолинейной траектории, обеспечивающей выход на дальность включения РСА Двкл относительно цели под требуемым бортовым пеленгом ϕгт(tвкл)=ϕг вкл, а второй участок - по дуге окружности, проходящей через цель и гарантирующей требуемое линейное разрешение РСА по азимуту δхт;
- оценкой текущего бортового пеленга ϕг и угловой скорости линии визирования цели ωг на первом участке по данным бортовой инерциальной навигационной системы (БИНС), измеряющей текущие продольное, нормальное и боковое ускорения ЛА (jп, jн, jб), углы курса, тангажа и крена  составляющие вектора скорости ЛА (Vx, Vy, Vz), путевую скорость Vп, а также координаты ЛА (хла, ула, zла), с учетом известных координат (априорных оценок координат) цели (xц, 0, zц) в нормальной земной системе координат (НЗСК); на втором участке - по данным РСА, который обнаруживает и сопровождает наземную цель, измеряя текущую дальность до цели Д, бортовой пеленг ϕг и угловую скорость линии ее визирования ωг;
составляющие вектора скорости ЛА (Vx, Vy, Vz), путевую скорость Vп, а также координаты ЛА (хла, ула, zла), с учетом известных координат (априорных оценок координат) цели (xц, 0, zц) в нормальной земной системе координат (НЗСК); на втором участке - по данным РСА, который обнаруживает и сопровождает наземную цель, измеряя текущую дальность до цели Д, бортовой пеленг ϕг и угловую скорость линии ее визирования ωг;
- аналитическим расчетом коэффициентов передачи ошибок по бортовому пеленгу Kϕ и угловой скорости линии визирования Kω в результате оценки начальных ошибок управления по бортовому пеленгу Δϕг0=ϕг0-ϕгт0 и угловой скорости линии визирования Δωг0=ωг0>ωгт0 - с учетом заданного коэффициента приоритета ошибок управления по бортовому пеленгу над ошибками по угловой скорости линии визирования γ и предельно допустимого значения бокового ускорения ЛА jmax в точке начала наведения, когда ошибки максимальны, из уравнения

где
τ0=Д0/Vсб0 - начальное время встречи с целью;
Д0 - начальная дальность до цели;
Vсб0=Vпcosϕг0 - начальная скорость сближения с целью;
sign(Δϕг0) - функция знака ошибки Δϕг0,
решением которого является искомая величина β, используемая для расчета соответствующих коэффициентов передачи ошибок управления;
- введением в закон управления ЛА на втором участке параметра компенсации установившихся ошибок управления
K0=2tgϕг вкл/τвкл,
где  - бортовой пеленг цели в момент включения РСА;
- бортовой пеленг цели в момент включения РСА;
τвкл=Двкл/Vсб вкл - время встречи ЛА с целью в момент включения РСА;
Двкл - дальность включения РСА;
Vсб вкл=Vпcos<ϕг вкл - скорость сближения с целью в момент включения РСА;
λ - длина волны зондирующего сигнала РСА;
Тс - время когерентного накопления сигналов РСА;
δхт - требуемая линейная разрешающая способность РСА;
- формированием требуемого бокового ускорения ЛА jгт в виде произведения его скорости на сумму взвешенных ошибок управления по бортовому пеленгу цели и угловой скорости линии ее визирования, а также параметра компенсации установившихся ошибок управления в соответствии с выражением

где Δϕг и Δωг - текущие ошибки управления ЛА по бортовому пеленгу и угловой скорости линии визирования цели относительно требуемых значений;
τ=Д/Vсб≈τ0-t - текущее время встречи ЛА с целью;
Д - дальность до цели;
Vсб=Vпcos ϕг - текущая скорость сближения ЛА с целью;
t - текущее время управления.
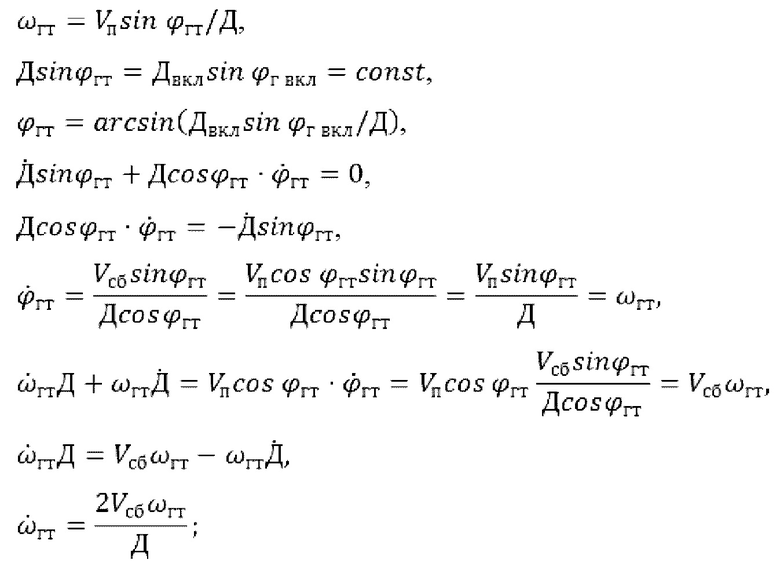
Для пояснения сущности заявляемого способа рассмотрим решение поставленной задачи в математическом аспекте. Геометрия перемещения ЛА относительно цели в горизонтальной плоскости ОXgZg НЗСК представлена на фиг. 1. Дифференциальные уравнения, описывающие управляемое изменение горизонтальных бортового пеленга ϕг (угла между вектором путевой скорости Vп и проекцией линии визирования на горизонтальную плоскость OXgZg НЗСК) и угловой скорости линии визирования цели ωг (скорости изменения угла визирования εг - угла между осью ОХg и проекцией линии визирования на горизонтальную плоскость OXgZg НЗСК), могут быть получены с учетом известных кинематических соотношений [5, стр. 107]
Тогда при условии  справедливы равенства
справедливы равенства

Откуда окончательно получаем

где  - управляющее ЛА воздействие, соответствующее скорости изменения его курса;
- управляющее ЛА воздействие, соответствующее скорости изменения его курса;
 - неконтролируемые воздействия, аппроксимируемые центрированными белыми гауссовскими шумами с известными односторонними спектральными плотностями мощности;
- неконтролируемые воздействия, аппроксимируемые центрированными белыми гауссовскими шумами с известными односторонними спектральными плотностями мощности;
ϕг0, ωг0 - начальные значения управляемых параметров состояния.
Дифференциальные уравнения, описывающие требуемое изменение бортового пеленга и угловой скорости линии визирования в горизонтальной плоскости могут быть получены с учетом следующих соотношений [4; 6, стр. 599 и 603]
для первого прямолинейного участка траектории ЛА при Д>Двкл
для второго криволинейного участка траектории ЛА при Д≤Двкл
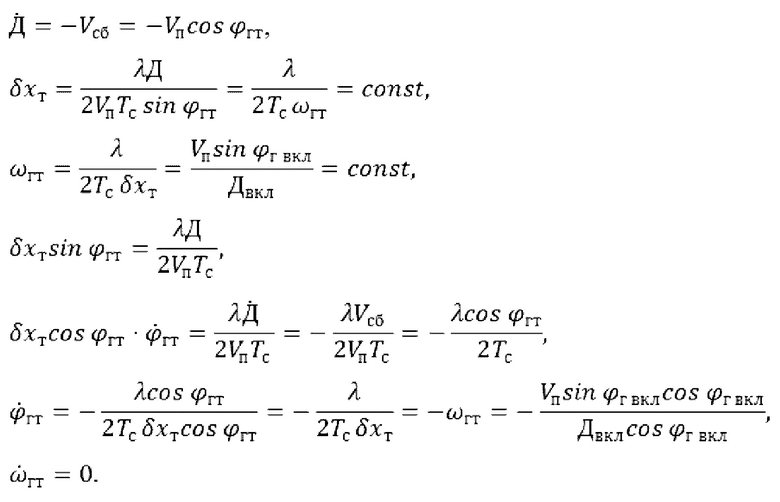
Откуда окончательно получаем
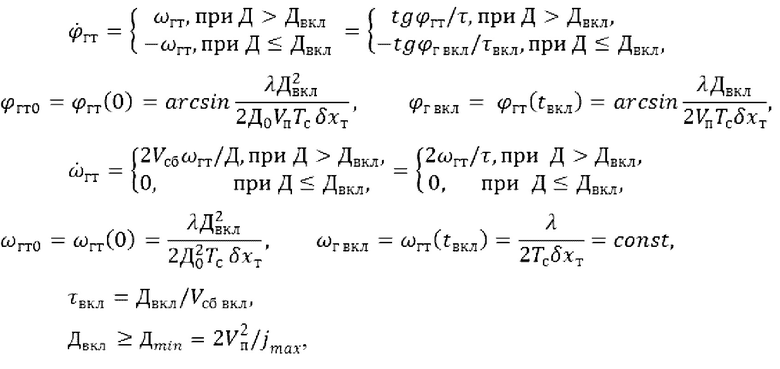
где τвкл - время встречи ЛА с целью в момент включения РСА;
Двкл - дальность до цели в момент включения РСА (перехода ЛА с первого участка траектории наведения на второй);
Vсб вкл=Vпcosϕг вкл - скорость сближения с целью в момент включения РСА;
Дmin - минимальная по располагаемой перегрузке дальность перехода ЛА с первого участка наведения на второй;
λ - длина волны зондирующего сигнала РСА;
Tc - время когерентного накопления сигналов РСА;
δхт - требуемая линейная разрешающая способность РСА;
Vп - путевая скорость ЛА;
jmax - предельно допустимое значение бокового ускорения ЛА.
С учетом представленных выражений изменение ошибок управления ЛА по бортовому пеленгу и угловой скорости линии визирования можно представить в виде
для первого участка наведения Д>Двкл

для второго участка наведения Д≤Двкл

В результате уравнение изменения ошибок управления ЛА ϕг=ϕг-ϕгт и Δωг=ωг-ωгт может быть записано в матричном виде

где  - вектор ошибок управления ЛА;
- вектор ошибок управления ЛА;
 - Динамическая матрица;
- Динамическая матрица;
 - вектор эффективности управления;
- вектор эффективности управления;
А - вектор «свободных» коэффициентов;
 - вектор возмущений;
- вектор возмущений;
 - вектор начальных ошибок управления ЛА.
- вектор начальных ошибок управления ЛА.
Вектор А, содержащий некомпенсированные составляющие уравнений изменения ошибок управления, определяется в соответствии с выражением

Необходимо определить величину управляющего воздействия u, минимизирующую интегральный квадратичный функционал качества

при выполнении ограничительного условия

где M{…} - операция статистического усреднения;
 - матрица коэффициентов штрафов за ошибки управления по бортовому пеленгу и угловой скорости линии визирования соответственно [7, стр. 246];
- матрица коэффициентов штрафов за ошибки управления по бортовому пеленгу и угловой скорости линии визирования соответственно [7, стр. 246];
α - коэффициент штрафа за суммарную ошибку управления ЛА;
γ - коэффициент приоритета ошибок управления по бортовому пеленгу над ошибками управления по угловой скорости линии визирования;
qu - коэффициент штрафа за величину управляющего сигнала;
umax - максимально допустимое значение управляющего сигнала;
sign(Δϕг0) - знак начальной ошибки управления по бортовому пеленгу.
Поскольку уравнение изменения ошибок управления линейное, вектор возмущений w - гауссовский, а функционал качества квадратичный, то в соответствии с теоремой разделения управляющее воздействие может быть получено без учета возмущений. В этом случае минимум функционала I достигается при управляющем воздействии [5 стр. 53; 7, стр. 241]

где
 - матрица и вектор параметров управления, удовлетворяющие матричным дифференциальным уравнениям
- матрица и вектор параметров управления, удовлетворяющие матричным дифференциальным уравнениям

Если принять D12=D21 и искать решения матричных дифференциальных уравнений в классе функций вида
где c11, с12, с22, h1 и h2 - неопределенные коэффициенты, то рассматриваемые системы дифференциальных уравнений могут быть преобразованы в системы алгебраических уравнений вида
для первого участка траектории
для второго участка траектории

В результате их решения можно получить следующее уравнение для управляющего воздействия

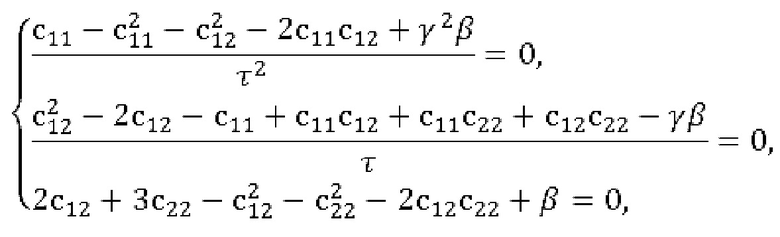
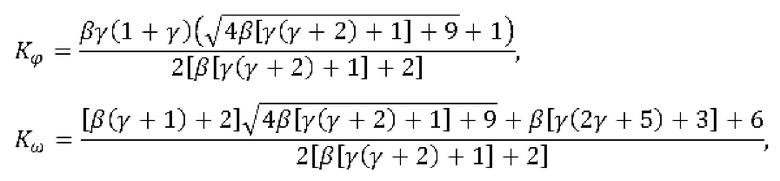
в котором, Kϕ, Kω коэффициенты передачи ошибок управления по бортовому пеленгу и угловой скорости линии визирования, а также K0 коэффициент компенсации установившейся ошибки имеют вид
K0=2tgϕг вкл/τвкл.
Значения коэффициентов β,  при назначенном коэффициенте приоритета ошибок управления по бортовому пеленгу над ошибками управления по угловой скорости линии визирования находят из решения уравнения
при назначенном коэффициенте приоритета ошибок управления по бортовому пеленгу над ошибками управления по угловой скорости линии визирования находят из решения уравнения

Это позволяет ограничить величину управляющего ЛА сигнала в начальный момент наведения, когда ошибки управления максимальны, предельно допустимым значением.
Параметр рассогласования между текущим и требуемым боковыми ускорениями для управления ЛА вычисляется с помощью выражения
Δ=jгт-jг.
Отличие предлагаемого способа от прототипа заключается в том, что - требуемое текущее боковое ускорение ЛА рассчитывается для более широких условий применения ЛА, когда влияние ошибок управления по бортовому пеленгу и угловой скорости линии визирования на управляющий сигнал, задаваемое коэффициентом γ, целесообразно сделать не одинаковым. При этом коэффициенты передачи ошибок управления Kϕ и Kω для заданного у определяются с учетом ограничения величины управляющего ЛА сигнала предельно допустимым значением jmax в результате решения системы уравнений
τ0=Д0/Vпcosϕг0,
где Δϕг0 и Δωг0 - ошибки управления по пеленгу и угловой скорости линии визирования цели в начале траектории выхода в точку включения РСА;
τ0 - время встречи ЛА с целью в начале траектории выхода в точку включения РСА;
Д0 - дальность до цели в начале траектории выхода в точку включения РСА;
ϕг0 - бортовой пеленг цели в начале траектории выхода в точку включения РСА;
β=α/qu - отношение коэффициента штрафа за суммарную ошибку управления ЛА к коэффициенту штрафа за величину управляющего сигнала;
- в закон управления боковым ускорением ЛА на участке наведения по данным РСА введен параметр компенсации установившихся ошибок управления ЛА K0
где λ - длина волны зондирующего сигнала РСА;
Двкл - дальность до цели в момент включения РСА;
Тс - интервал синтезирования;
δхт - требуемая линейная разрешающая способность РСА;
Vп - путевая скорость ЛА;
- расчет требуемого бокового ускорения ЛА на обоих участках наведения выполняется в соответствии с выражениями

где τ=Д/Vпcosϕг - текущее время встречи ЛА с целью.
Таким образом, предлагаемый способ наведения минимизирует интегральную ошибку управления при наведении ЛА по комбинированной траектории, состоящей из участка наведения в точку включения РСА и участка наведения по дуге окружности с постоянным линейным разрешением по азимуту, с учетом ограничений на величину управляющего сигнала.
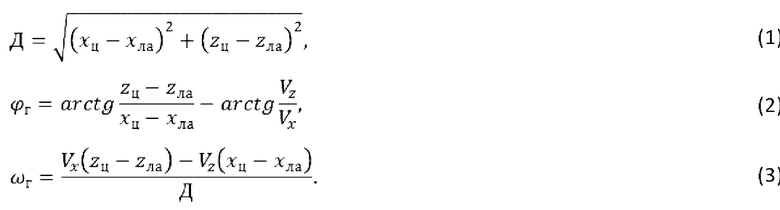
Согласно предлагаемому способу полет ЛА к цели в горизонтальной плоскости разделяется на участок вывода ЛА в точку включения РСА и непосредственно участок наведения по данным РСА. Расчет параметров траектории ЛА при выводе в точку включения РСА и требуемого бокового ускорения производится по априорным сведениям о местоположении цели (xц,yц,zц) и данным навигационной системы, которая измеряет текущие продольное, нормальное и боковое ускорения (jп,jн,jб), углы курса, тангажа и крена  составляющие скорости (Vx, Vy, Vz), а также координаты ЛА (хла,ула,zла). Текущие значения дальности до цели, ее бортового пеленга и угловой скорости линии визирования определяются с помощью выражений
составляющие скорости (Vx, Vy, Vz), а также координаты ЛА (хла,ула,zла). Текущие значения дальности до цели, ее бортового пеленга и угловой скорости линии визирования определяются с помощью выражений
Расчет параметров траектории на конечном участке наведения (фиг. 2) и требуемого бокового ускорения ЛА производится по данным навигационной системы, которая измеряет путевую скорость ЛА Vп, и РСА, который обнаруживает и сопровождает наземную цель, измеряя текущую дальность Д, скорость сближения с ней Vсб, бортовой пеленг ϕг и угловую скорость линии ее визирования ωг в горизонтальной плоскости связанной с ЛА системы координат.
Задают дальность включения Двкл РСА в соответствии с выражением

где Добн - дальность обнаружения цели РСА.
Рассчитывают требуемый бортовой пеленг цели в момент включения РСА

Определяют требуемые значения бортового пеленга цели ϕгт и ее угловой скорости линии визирования на обоих участках полета ЛА согласно выражениям
Рассчитывают ошибки управления ЛА по бортовому пеленгу и угловой скорости линии визирования

Задают коэффициент приоритета ошибок управления по бортовому пеленгу над ошибками управления по угловой скорости линии визирования γ и определяют коэффициент β согласно уравнений

Вычисляют коэффициенты передачи ошибок управления ЛА Kϕ, Kω

Рассчитывают параметр компенсации установившихся ошибок управления ЛА K0 в соответствии с выражением

Вычисляют требуемые значения бокового ускорения ЛА

Формируют сигнал управления ЛА в горизонтальной плоскости

Определяют дальность ослепления Дп, с которой ЛА переходит на прямое наведение
ϕгт=ωгт=0 [6, с. 595]

Краткое описание чертежей
Сущность предлагаемого способа наведения ЛА на наземные цели с помощью РСА и вариант устройства, его реализующего, поясняется дальнейшим описанием и чертежами.
На фиг. 1 представлена геометрия визирования наземной цели.
На фиг. 2 представлены траектории наведения ЛА, полученные при моделировании.
На фиг. 3 представлены временные зависимости линейной разрешающей способности РСА по азимуту, полученные при моделировании.
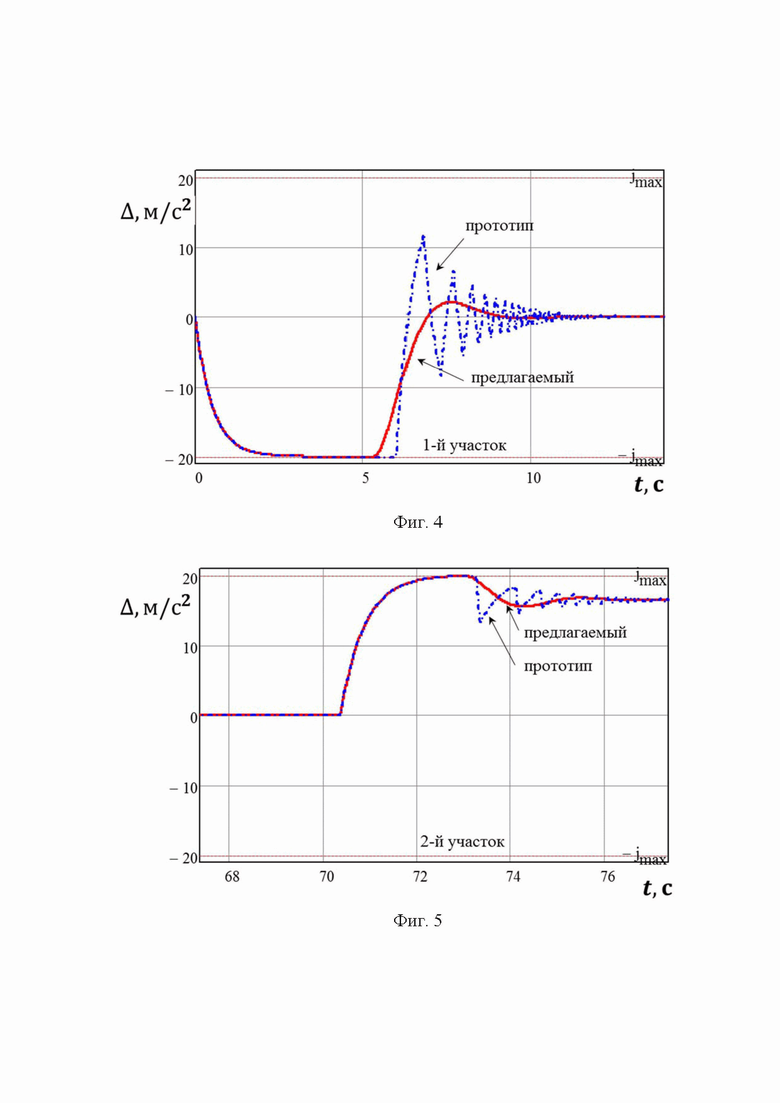
На фиг. 4 представлены временные зависимости динамической ошибки отработки требуемого бокового ускорения ЛА в момент начала наведения, полученные при моделировании.
На фиг. 5 представлены временные зависимости динамической ошибки отработки требуемого бокового ускорения ЛА в точке включения РСА, полученные при моделировании.
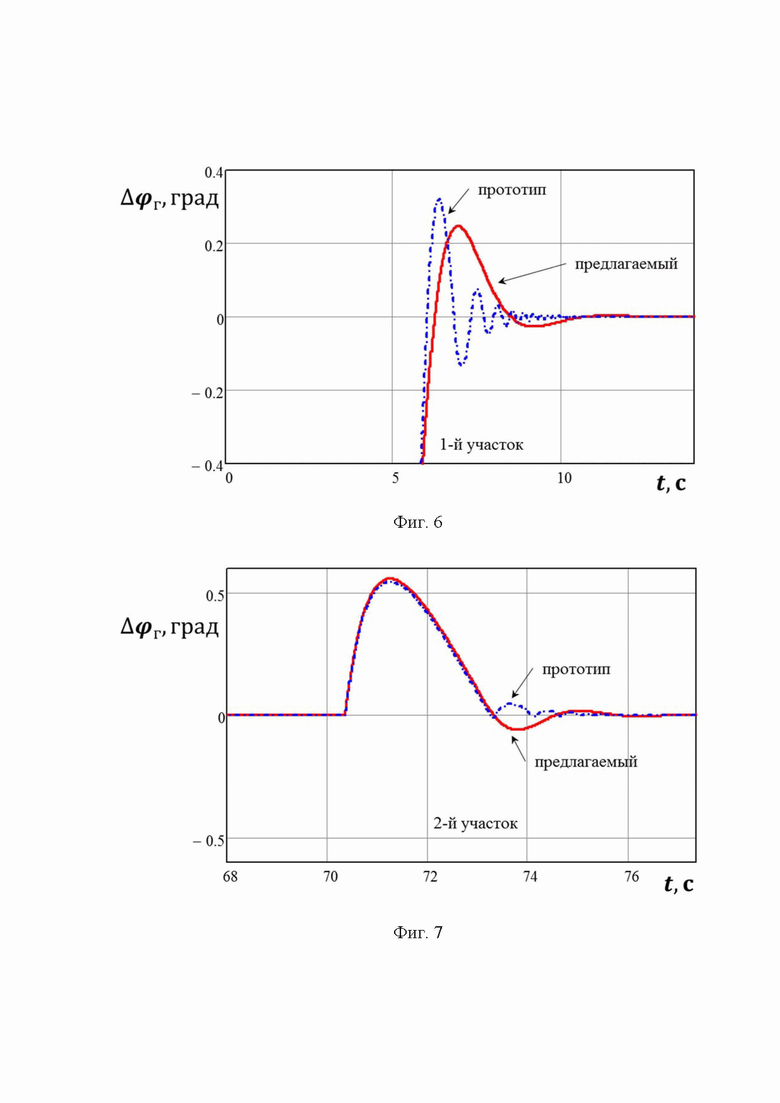
На фиг. 6 представлены временные зависимости динамической ошибки управления по бортовому пеленгу цели в горизонтальной плоскости в момент начала наведения, полученные при моделировании.
На фиг. 7 представлены временные зависимости динамической ошибки управления по бортовому пеленгу цели в горизонтальной плоскости в точке включения РСА, полученные при моделировании.
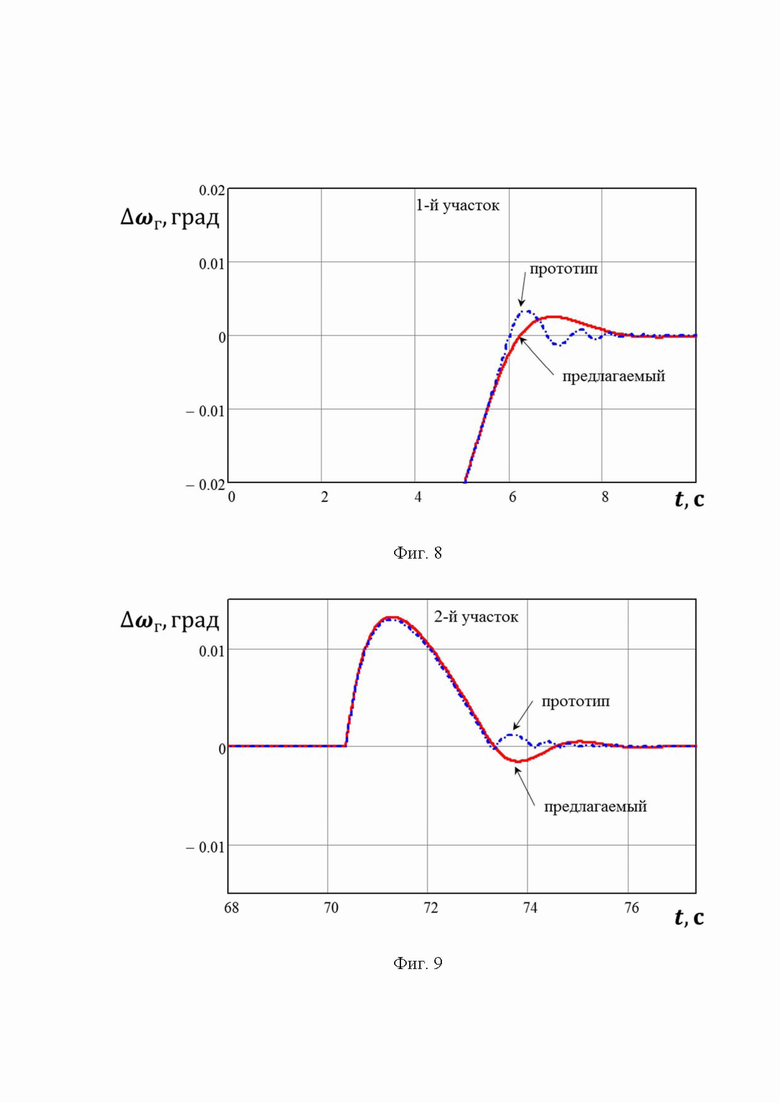
На фиг. 8 представлены временные зависимости динамической ошибки управления по угловой скорости линии визирования цели в горизонтальной плоскости в момент начала наведения, полученные при моделировании.
На фиг. 9 представлены временные зависимости динамической ошибки управления по угловой скорости линии визирования цели в горизонтальной плоскости в точке включения РСА, полученные при моделировании.
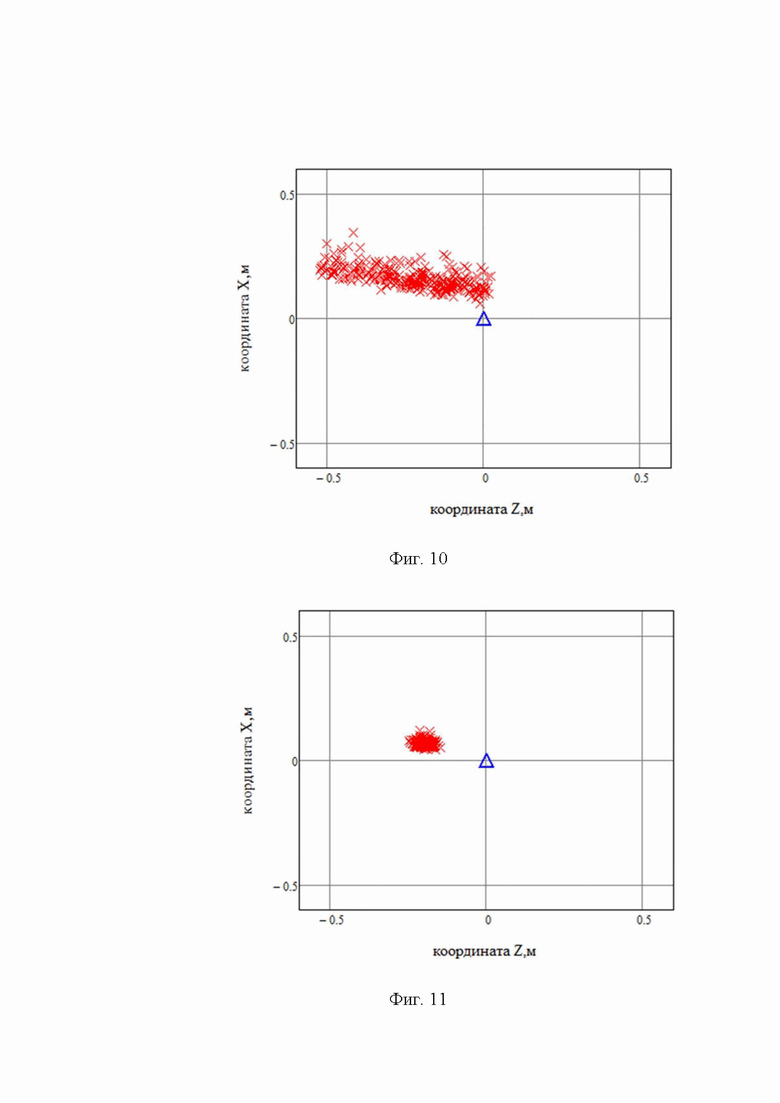
На фиг. 10 представлены промахи наведения ЛА при использовании способа-прототипа.
На фиг. 11 представлены промахи наведения ЛА при использовании предлагаемого способа.
На фиг. 2…9 штрих-пунктирные линии соответствуют способу прототипу, сплошные предлагаемому способу.
На фиг. 12 представлена структура устройства, реализующего предлагаемый способ наведения ЛА на наземную цель, где приняты следующие обозначения:
1 - радиолокатор с синтезированием апертуры антенны (РСА);
2 - блок ввода исходных данных (БВИД);
3 - бортовая инерциальная навигационная система (БИНС);
4 - блок оценок параметров цели (БОПЦ);
5 - блок расчета требуемых параметров цели (БРТПЦ);
6 - блок расчета ошибок управления ЛА (БРОУ);
7 - блок расчета коэффициентов усиления (БРКУ);
8 - блок расчета параметров рассогласования (БРПР).
9 - блок расчета требуемого ускорения ЛА (БРТУ);
На фиг. 12 первый выход РСА 1 соединен с третьим входом БРОУ 6 и первым входом БРТУ 9, второй выход РСА 1 через последовательно соединенные БРТПЦ 5, БРОУ 6, БРКУ 7 и БРТУ 9 соединен со вторым входом БРПР 8, первый выход БВИД 2 через БОПЦ 4 соединен со вторым входом БРОУ 6 и шестым входом БРТУ 9, второй выход БВИД 2 соединен с третьим входом БРТПЦ 5 и вторым входом БРТУ 9, четвертый выход БОПЦ 4 соединен с третьим входом БРКУ 7, второй выход БОПЦ 4 соединен с первым входом БРТПЦ 5, третий выход БВИД 2 соединен с первым входом БРКУ 3, третий выход БИНС 3 через БОПЦ 4 соединен с входом РСА 1, второй выход БИНС 3 соединен с четвертыми входами БРПТЦ 5 и БРТУ 9, первый выход БИНС 3 соединен с первым входом БРПР 8 второй выход БРОУ 6 соединен с пятым входом БРТУ 9.
В соответствии со структурой устройства, представленной на фиг. 12, предлагаемый способ реализуется следующим образом:
До начала полета ЛА в БВИД 2 вводится полетное задание с предполагаемыми координатами цели (хц; 0; zц) в НЗСК, требуемое линейное разрешение РСА δхт по азимуту, длины волн излучаемого РСА сигнала λ, время синтезирования апертуры Тс, дальность включения РСА Двкл, предельно допустимое боковое ускорение ЛА jmax, а также таблица коэффициентов γ приоритета ошибок управления по бортовому пеленгу над ошибками управления по угловой скорости линии визирования в зависимости от скорости ЛА Vла и ошибок управления по бортовому пеленгу Δϕг и угловой скорости линии визирования Δωг.
В начале полета ЛА БВИД 2 со второго выхода выдает на третий вход БРТПЦ 5 и второй вход БРТУ 9 требуемые значения линейного разрешения цели δхт, времени синтеза апертуры Тс, длины волны излучаемого сигнала λ и дальности включения РСА Двкл, удовлетворяющее ограничению (4). Координаты цели (хц; 0; zц) с первого выхода БВИД 2 передаются на первый вход БОПЦ 4. Кроме того, БВИД 2 выдает требуемый коэффициент приоритета ошибок управления по бортовому пеленгу по сравнению с ошибками управления по угловой скорости линии визирования γ и предельно допустимое боковое ускорение ЛА jmax с третьего выхода на первый вход БРКУ 3.
На протяжении всего времени полета ЛА БИНС 3 формирует в НЗСК оценки его координат (хла; yла; zла), текущие продольное, нормальное и боковое ускорения ЛА (jп; jн; jб) - составляющих скорости (Vx; Vy; Vz), а также координат (хла; yла; zла). Координаты ЛА (хла; ула; zла), составляющие скорости (Vx; Vy; Vz) и модуль скорости ЛА Vла передаются с третьего выхода БИНС 3 на второй вход БОПЦ 4, значение скорости Vлa со второго выхода БИНС 3 поступает на четвертые входы БРТПЦ 5 и БРТУ 9, значение бокового ускорения ЛА jб поступает со второго выхода БИНС 3 на первый вход БРПР 8;
На траектории вывода ЛА в точку включения РСА 1 по данным БИНС 3 о текущих координатах ЛА (хла; yла; zла), составляющих скорости ЛА (Vx; Vy; Vz) и априорных сведений о координатах цели (хц; 0; zц) в БОПЦ 4 производятся:
- начальные оценки дальности цели Д0, бортового пеленга цели ϕг0, угловой скорости линии визирования ωг0, текущие оценки дальности цели Д, бортового пеленга ϕг и угловой скорости линии визирования ωг, по выражениям (1), (2), (3) и расчетное время сближения ЛА с целью по выражению

- вывод значения начальной дальности Д0, бортового пеленга цели ϕг0, угловой скорости линии визирования ωг0 и расчетного времени сближения ЛА с целью с четвертого выхода БОПЦ 4 на третий выход БРКУ 7;
- вывод текущих значений дальности Д, бортового пеленга ωг и угловой скорости линии визирования ωг на траектории выхода в точку включения РСА 1 с третьего выхода БОПЦ 4 на второй выход БРОУ 6 и шестой вход БРТУ 9;
- вывод текущих значений Д и заданной дальности включения Двкл со второго выхода БОПЦ 4 на первый выход БРТПЦ 5;
- сравнение текущей дальности цели Д с дальностью Двкл в БОПЦ 4, по которому определяется момент включения РСА и формируется команда включения РСА 1, которая с первого выхода БОПЦ 4 поступает на вход РСА 1.
При включении РСА 1 обнаруживает наземную цель, измеряет ее текущие дальность Д, бортовой пеленг ϕг и угловую скорость линии визирования ωг, которые через первый выход РСА 1 поступают на первый вход БРТУ 9 и третий вход БРОУ 6; дополнительно текущая дальность до цели Д поступает со второго выхода РСА 1 на БРТПЦ 5.
На двух участках наведения БРТПЦ 5 определяет текущие требуемые значения бортового пеленга цели ϕгт и угловой скорости линии визирования цели момент выхода ЛА в точку включения РСА определяется сравнением текущей дальности цели Д, поступающей на первый вход БРТПЦ 5 с дальностью включения РСА ДЕКЛ. Наведению ЛА на конечном участке соответствует Д≤Двкл. Расчет требуемых значений пеленга ϕгт и угловой скорости ωгт цели в обоих режимах БРТПЦ 5 производит по выражениям (6) и (7) с выводом их на первый вход БРОУ 6.
БРОУ 6 в результате сравнения текущих значений бортового пеленга ϕг и угловой скорости линии визирования цели ωг, приходящих на его второй (траектория выхода в точку включения РСА) и третий вход (траектория наведения по данным РСА), с текущими требуемыми значениями ϕгт и ωгт цели определяет:
- текущие ошибки управления ЛА по бортовому пеленгу Δϕг и угловой скорости линии визирования Δωг цели по выражениям (8) и (9) и выводит их со второго выхода на пятый вход БРТУ 9;
- ошибки управления ЛА в начале траектории выхода в точку включения РСА Δϕг0 и Δωг0 выводятся через первый выход БРОУ 6 на второй вход БРКУ 7.
БРКУ 7 по Δϕг0 и Δωг0, а также ранее принятым в начале траектории выхода в точку включения РСА начальной дальности цели Д0, скорости сближения Vсб0, коэффициента приоритета ошибок управления по бортовому пеленгу над ошибками управления по угловой скорости линии визирования γ из системы уравнений (10)…(13) рассчитывает коэффициент β и коэффициенты передачи ошибок управления ЛА Kϕ, Kω. Далее БРКУ 7 вычисляет по выражениям (14), (15) параметр компенсации установившихся ошибок управления K0. Значения коэффициентов Kϕ, Kω и K0 с выхода БРКУ 7 поступают на третий вход БРТУ 9, где БРТУ 9 по выражениям (16), (17) вычисляет требуемое текущее боковое ускорение ЛА и выдает его на второй вход БРПР 8.
БРПР 8 рассчитывает Δ - текущее рассогласование бокового ускорения ЛА от требуемого в горизонтальной плоскости в соответствии с выражением (18), Значение Δ является выходным сигналом устройства, реализующего предлагаемый способ наведения ЛА на наземную цель.
В интересах сравнительного анализа эффективности наведения ЛА с использованием предлагаемого способа и способа-прототипа было проведено математическое моделирование. При этом в качестве исходных принимались следующие данные: скорость ЛА Vлa=400 м/с, дальность включения РСА Двкл=20 км, длина волны зондирующего сигнала λ=0,027 м, время синтезирования апертуры Тс=0,2 с, максимально допустимое боковое ускорение ЛА jmax=20 м/с, требуемая линейная разрешающая способность δхт=5 м. Координаты неподвижной наземной цели (40; 0; 40) км. Дополнительно устанавливались значения γ=1, β=5⋅103. Автопилот ЛА аппроксимировался апериодическим звеном с постоянной времени 0,5 с.
Полученные в результате моделирования траектории наведения ЛА на наземную цель в горизонтальной плоскости при использовании предлагаемого способа с принудительным ограничением требуемого бокового ускорения величиной jmax (сплошная линия) и способа-прототипа (штрих-пунктирная линия) представлены на фиг. 2. На фиг. 3 отображено соответствующие указанным траекториям изменение линейного разрешения РСА по азимуту. Законы изменения во времени параметра рассогласования, ошибок управления по бортовому пеленгу цели и угловой скорости линии ее визирования в горизонтальной плоскости представлены для двух участков траектории начала наведения и включения РСА изображены на фиг. 4…9.
Дополнительно для предлагаемого способа и способа прототипа оценивались время наведения Тн, интегральный функционал качества I, мощность сигнала управления Pj и флуктуационная составляющая промаха h. Интегральный функционал качества и мощность сигнала управления рассчитывались в соответствии с выражениями
Методом статистических испытаний при анализе М=300 реализаций получены промахи наведения ЛА. Входе моделирования учитывались среднеквадратические погрешности измерений РСА дальности σд=20 м, бортового пеленга σϕ=0,01 град, и угловой скорости линии визирования σω=0,001 град./с. Результаты моделирования для способа прототипа представлены на фиг. 10, а для предлагаемого способа на фиг. 11.
Из анализа представленных результатов можно сделать следующие выводы:
1. Наведение ЛА с использованием предлагаемого способа и способа-прототипа позволяет достичь требуемого линейного разрешения РСА по азимуту 5 м.
2. Ошибки отработки требуемого бокового ускорения ЛА в момент начала наведения с использованием предлагаемого способа в 5 раза меньше по сравнению с прототипом. Кроме того, уменьшены время и колебательность процесса отработки указанных ошибок как на траектории полета в точку включения РСА, так и непосредственно на этапе наведения с использованием РСА.
3. Ошибки управления по бортовому пеленгу и угловой скорости линии визирования на первом и втором участке с использованием предлагаемого способа имеют меньшую колебательность по сравнению с прототипом.
4. Сравнительный анализ потенциальной эффективности наведения ЛА с использованием предлагаемого способа и способа-прототипа показывает: время наведения ЛА одинаково и равно Тн=108,8 с; интенсивность управляющего сигнала для способа-прототипа Pj=118 м2/с2, а для предлагаемого способа Pj=116 м2/с2; величина интегрального показателя для способа-прототипа составляет I=5,77⋅1014, а для разработанного способа I=1,1⋅1011.
5. Из анализа фиг. 10 и фиг. 11 следует, что предлагаемый способ обеспечивает меньшую флуктуационную составляющую промаха наведения по сравнению с способом-прототипом.
Полученные результаты позволяют сделать вывод о достижении цели изобретения.
Осуществление изобретения
На основе сведений, представленных в заявке, предлагаемый способ наведения на наземные цели может быть реализован на базе существующих навигационных систем, РСА и вычислителей, устанавливаемых на борту ЛА. Способ позволяет рассчитывать коэффициенты передачи ошибок управления ЛА по бортовому пеленгу и угловой скорости линии визирования цели, а также параметр компенсации ошибок установившегося режима без дополнительного моделирования. По данным математического моделирования предлагаемый способ по сравнению с прототипом обеспечивает повышение качества переходных процессов при снижении интегральной ошибки управления ЛА.
Литература
1 Патент России 2148235 Способ пропорционального наведения летательных аппаратов на наземные объекты
2 Патент России 2210801 Универсальный способ наведения самолетов на наземные цели
3 Патент России 2664258 Способ наведения ЛА на наземные цели по данным радиолокатора с синтезированием апертуры антенны
4 Патент России 2773672 Способ наведения летательного аппарата на наземные цели по данным радиолокатора с синтезированием апертуры антенны
5 Авиационные системы радиоуправления: учебник для военных и гражданских ВУЗов и научно-исследовательских организаций / Под. ред. В.И. Меркулова. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2008. 423 с.
6 Авиационные системы радиовидения: монография / Под ред. Г.С. Кондратенкова. М.: Радиотехника, 2015. 648 с.
7 Бухалев В.А. Основы автоматики и теории управления: учебник для слушателей и курсантов ВУЗов ВВС. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2006. 406 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ С ПОМОЩЬЮ ОДНОПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2020 |
|
RU2754349C1 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
Изобретение относится к радиоэлектронным системам самонаведения и может быть использовано для наведения летательных аппаратов (ЛА), оснащенных радиолокатором с синтезированием апертуры (РСА), на наземные цели. Разделяют траекторию наведения ЛА на два участка. Первый участок обеспечивает выход на дальность включения РСА под требуемым бортовым пеленгом, второй участок гарантирует требуемое линейное разрешение РСА по азимуту. Формируют оценку текущего бортового пеленга и угловой скорости линии визирования цели на первом участке по данным бортовой инерциальной навигационной системы, с учетом известных координат цели, на втором участке - по данным РСА. Рассчитывают коэффициенты усиления ошибок управления ЛА и параметр компенсации установившихся ошибок. Рассчитывают требуемое боковое ускорение ЛА. Достигается оптимизация закона траекторного управления ЛА с РСА в горизонтальной плоскости для повышения качества переходных процессов, при ограничении на величину располагаемого бокового ускорения и обеспечения минимального промаха. 12 ил.
Способ наведения летательного аппарата (ЛА) на наземные цели с помощью радиолокатора с синтезированием апертуры антенны (РСА), включающий формирование бортовой инерциальной навигационной системой (БИНС) текущих оценок продольного, нормального и бокового ускорения ЛА  , углов курса, тангажа и крена
, углов курса, тангажа и крена  , определяющих ориентацию связанной с ЛА системы координат (ССК) относительно нормальной земной системы координат (НЗСК), составляющих векторы скорости ЛА
, определяющих ориентацию связанной с ЛА системы координат (ССК) относительно нормальной земной системы координат (НЗСК), составляющих векторы скорости ЛА  , путевую скорость
, путевую скорость  , а также координаты ЛА (
, а также координаты ЛА ( ,
, ,
, ) в НЗСК; разделение траектории полета ЛА к цели на участок вывода в точку включения РСА и конечный участок наведения по данным РСА; задание дальности до цели в момент включения РСА
) в НЗСК; разделение траектории полета ЛА к цели на участок вывода в точку включения РСА и конечный участок наведения по данным РСА; задание дальности до цели в момент включения РСА  исходя из минимального радиуса разворота; определение требуемого бортового пеленга цели
исходя из минимального радиуса разворота; определение требуемого бортового пеленга цели  при переходе на конечный участок наведения; формирование текущих оценок дальности до цели Д, бортового пеленга
при переходе на конечный участок наведения; формирование текущих оценок дальности до цели Д, бортового пеленга  и угловой скорости линии визирования
и угловой скорости линии визирования  на участке вывода в точку включения РСА исходя из априорных сведений о местоположении цели (
на участке вывода в точку включения РСА исходя из априорных сведений о местоположении цели ( ,
, ,
, ) и данных БИНС согласно выражениям
) и данных БИНС согласно выражениям



формирование текущих оценок горизонтальной дальности до цели  , ее бортового пеленга и угловой скорости линии визирования в горизонтальной плоскости на конечном участке наведения по данным РСА; преобразование измеренных координат цели из ССК в НЗСК с учетом данных БИНС о угловом положении ЛА; задание требуемых значений бортового пеленга цели
, ее бортового пеленга и угловой скорости линии визирования в горизонтальной плоскости на конечном участке наведения по данным РСА; преобразование измеренных координат цели из ССК в НЗСК с учетом данных БИНС о угловом положении ЛА; задание требуемых значений бортового пеленга цели  и угловой скорости линии ее визирования
и угловой скорости линии ее визирования  ; расчет ошибок управления ЛА по бортовому пеленгу
; расчет ошибок управления ЛА по бортовому пеленгу  и угловой скорости линии визирования
и угловой скорости линии визирования  в виде разности текущих оценок и требуемых значений
в виде разности текущих оценок и требуемых значений
= ,
,
требуемые значения бортового пеленга цели  и угловой скорости линии визирования цели
и угловой скорости линии визирования цели  на обоих участках полета ЛА определяются выражениями:
на обоих участках полета ЛА определяются выражениями:
где  - длина волны зондирующего сигнала РСА;
- длина волны зондирующего сигнала РСА;
 - интервал синтезирования;
- интервал синтезирования;
 - требуемая линейная разрешающая способность РСА;
- требуемая линейная разрешающая способность РСА;
расчет коэффициентов усиления ошибок управления ЛА  ,
,  и параметра компенсации установившихся ошибок
и параметра компенсации установившихся ошибок  ; расчет требуемого бокового ускорения ЛА в горизонтальной плоскости
; расчет требуемого бокового ускорения ЛА в горизонтальной плоскости  ; определение дальности ослепления
; определение дальности ослепления  , с которой система переходит на прямое наведение
, с которой система переходит на прямое наведение
 ;
;
формирование сигнала управления как разности между требуемым и текущим  боковыми ускорениями ЛА по формуле
боковыми ускорениями ЛА по формуле
 ,
,
отличающийся тем, что дальность до цели в точке включения РСА  задают из ограничения, определяемого формулой
задают из ограничения, определяемого формулой
 ,
,
где  - дальность обнаружения цели РСА;
- дальность обнаружения цели РСА;
 - максимально допустимое боковое ускорение ЛА;
- максимально допустимое боковое ускорение ЛА;
требуемое текущее боковое ускорение ЛА рассчитывается для более широких условий применения ЛА, при этом коэффициенты передачи ошибок управления и для заданного коэффициента приоритета ошибок управления по бортовому пеленгу над ошибками управления по угловой скорости линии визирования  определяются с учетом ограничения величины управляющего ЛА сигнала предельно допустимым значением в результате решения системы уравнений
определяются с учетом ограничения величины управляющего ЛА сигнала предельно допустимым значением в результате решения системы уравнений
 ,
,



 и
и  - ошибки управления по пеленгу и угловой скорости линии визирования цели в начале траектории выхода в точку включения РСА;
- ошибки управления по пеленгу и угловой скорости линии визирования цели в начале траектории выхода в точку включения РСА;
 - время встречи ЛА с целью в начале траектории выхода в точку включения РСА;
- время встречи ЛА с целью в начале траектории выхода в точку включения РСА;
 - дальность до цели в начале траектории выхода в точку включения РСА;
- дальность до цели в начале траектории выхода в точку включения РСА;
 - бортовой пеленг цели в начале траектории выхода в точку включения РСА;
- бортовой пеленг цели в начале траектории выхода в точку включения РСА;
 - отношение коэффициента штрафа за суммарную ошибку управления ЛА к коэффициенту штрафа за величину управляющего сигнала;
- отношение коэффициента штрафа за суммарную ошибку управления ЛА к коэффициенту штрафа за величину управляющего сигнала;
в закон управления боковым ускорением ЛА на участке наведения по данным РСА вводится параметр компенсации установившихся ошибок управления ЛА


расчет требуемого бокового ускорения ЛА на обоих участках наведения выполняется в соответствии с выражениями

где  - текущее время встречи ЛА с целью.
- текущее время встречи ЛА с целью.
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ НАВЕДЕНИЯ САМОЛЕТОВ НА НАЗЕМНЫЕ ЦЕЛИ | 2002 |
|
RU2210801C1 |
| CA 3001653 A1, 27.04.2017. | |||

