Изобретение относится к системам наведения на высокоскоростные и интенсивно маневрирующие цели, в частности к системам наведения на гиперзвуковые летательные аппараты (ГЗЛА).
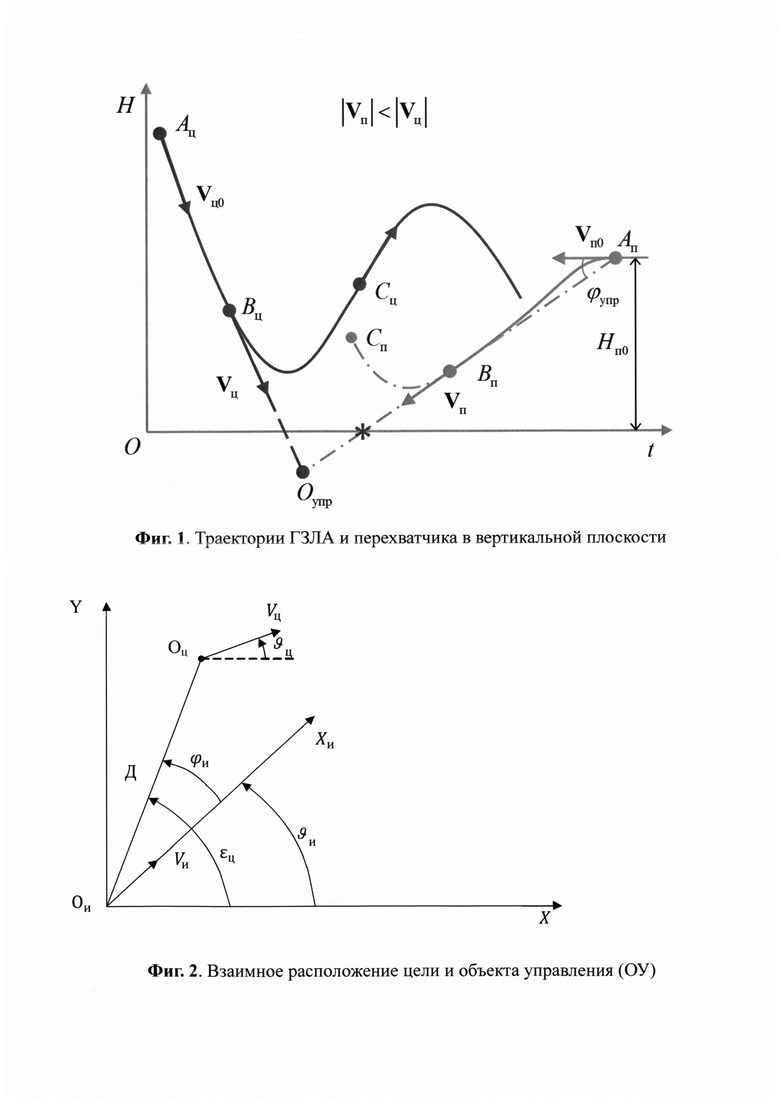
Анализ состояния и тенденций развития авиационной техники свидетельствует о том, что в передовых в военном отношении странах уделяется все большее внимание разработке, испытаниям и внедрению в практику ведения боевых действий ГЗЛА, обладающих рядом существенных преимуществ [1-3]. Среди этих преимуществ прежде всего следует выделить способность перемещаться в пространстве с высокой скоростью Vц≈5…10 Μ (Μ - скорость звука) по сложным законам со сменой знака производной координат состояния. Примерный вид траектории ГЗЛА в вертикальной плоскости показан на фиг. 1, на которой проиллюстрирована возможность перехвата цели только в переднюю полусферу, если ее скорость на порядок выше скорости перехватчика (Vц>Vп).
Необходимо подчеркнуть, что при таких условиях существующие системы наведения в упрежденную точку встречи не обеспечивают перехват ГЗЛА из-за смены направления полета цели.
Задачей изобретения является синтез оптимального управления перехватчиком ГЗЛА на основе метода обратных задач динамики, который позволяет для системы

при ограничении вида:

сформировать сигнал управления

по минимуму целевой функции

Здесь  - n - мерный вектор координат состояния, f(x,u,t) - n - мерная функция,
- n - мерный вектор координат состояния, f(x,u,t) - n - мерная функция,  - m - мерный вектор управления,
- m - мерный вектор управления,
причем m≤n, F - функция, учитывающая несоответствия желаемых (уж) и текущих координат, L(x,u,t) - скалярная неотрицательная функция, SK[х(tK)] - терминальное слагаемое целевого функционала

Рассмотрим задачу синтеза закона управления перехватчиком, состояние которого определяется математической моделью

наводимого в вертикальной плоскости на цель, координаты которой определяются аналогичной системой дифференциальных уравнений

где ц, ε ωц - угол визирования цели и его угловая скорость, jц, jи - нормальные ускорения цели и истребителя, ϕи, ωи - угол поворота продольной оси носителя и угловая скорость ее перемещения, Τ - постоянная времени цели выполнения маневра, Kи, Kц - коэффициенты эффективности перехватчика и цели, Ти - постоянная времени объекта управления по угловой скорости курса.
Относительное положение цели и перехватчика иллюстрируется фиг. 2, где точки Ои и Оц - положения истребителя и цели в вертикальной плоскости ΧΟиΥ, Хи - продольная ось самолета, ϑц и ϑи - углы тангажа цели и истребителя, Vц и Vи - векторы скорости цели и истребителя, ϕи - бортовой пеленг цели в вертикальной плоскости.
Требуется сформировать сигнал управления jи, оптимальный по минимуму функционала

при ограничении

Необходимо отметить, что манипулируя в модели (6) законами изменения jц, можно реализовать практически любые траектории ее движения.
Для моделей (6) и (7) был получен следующий закон управления, оптимальный по минимум функционала (8) при ограничении (9):

Значения коэффициентов λ1 и λ0 определяются следующим образом.
Результат использования управления (10) в системе (6) подставляется в функционал (8), который будет представлять собой параметрическое интегральное уравнение относительно неизвестных коэффициентов λ1, λ0.
Анализ полученного закона управления (10) позволяет сделать следующие выводы:
Во-первых, он обеспечивает объекту (6) астатизм второго порядка, если все компоненты управления либо точно измеряются, либо точно вычисляются;
Во-вторых, управление (10) представляет собой параметрическое уравнение относительно коэффициентов λ1 и λ0;
В-третьих, первые два слагаемые, реализующие прототип закона управления, представляют собой обычные пропорционально-дифференциальные слагаемые от рассогласования (10).
Четвертое слагаемое учитывает маневр цели, оставшиеся слагаемые определяют балансировочное значение перегрузки на установившихся режимах полета.
Исследование эффективности закона управления (10) проводилось по результатам моделирования полета цели (7) в вертикальной плоскости по квазисинусоидальной траектории полета перехватчика (6) с законом управления (10) в различных начальных пространственных положениях в передней полусфере (фиг. 1).
Проведено моделирование закона управления (10) и анализ результатов.
Условия моделирования: расстояние до цели 420 км; скорость цели 1700 м/с; скорость перехватчика 800 м/с.
Результаты моделирования приведены на фиг. 3-5.
В ходе исследования смоделированного закона управления (10) перехватчиком установлено, что он обеспечивает эффективный сектор поражения цели, равный 40 град, относительно направления движения цели. Значения текущего промаха проиллюстрированы фиг. 3.
Исследования смоделированного в качестве прототипа закона управления позволяют заключить, что прототип обеспечивает перехват цели в секторе 10 град, относительно направления движения цели (фиг. 4). Значения текущего промаха приведены на фиг. 5.
При выходе за значения сектора предоставляется невозможным осуществить перехват цели т.к. перехватчик оказывается на догонных курсах, а при значительной разнице скоростей цели и перехватчика поразить цель невозможно.
В ходе синтеза полученного закона управления (10) путем моделирования перехвата цели с разных точек на плоскости при встречном курсе установлено что наиболее эффективным является зона начала перехвата цели в диапазоне ±5 град (порядка ±50 км) (фиг. 2).
Реализация законов управления истребителем (10) непосредственно на борту ЛА предполагает необходимость оценивания следующих координат состояния объектов управления: углов и угловых скоростей линий визирования ϕи, ωи, ωц); угла тангажа ЛА ϑи и скорости его изменения  ;
;
перегрузок, действующих на цель (jц, jи); дальности D и скорости ее изменения  .
.
Принципы функционирования предложенного способа в системе, реализующей его, поясняются на фиг. 6, где 1 - измерители, формирующие наблюдения z; 2 - фильтр, принимающий на вход сигналы наблюдений ϕ1и, ϕ2и, и Dи и формирующий оценки курса ЛА, оценки абсолютного углового положения цели, дальности до цели  ; 3 - усилитель, получающий на вход сигнал (εц-ϑи) и усиливающий его с коэффициентом λ0, 4 - усилитель, получающий на вход
; 3 - усилитель, получающий на вход сигнал (εц-ϑи) и усиливающий его с коэффициентом λ0, 4 - усилитель, получающий на вход  и усиливающий его с коэффициентом
и усиливающий его с коэффициентом  ; 5 - усилитель, получающий на вход сигналы ωи и усиливающий его с коэффициентом
; 5 - усилитель, получающий на вход сигналы ωи и усиливающий его с коэффициентом  ; 6 - усилитель, получающий на вход сигналы ωц и усиливающий его с коэффициентом
; 6 - усилитель, получающий на вход сигналы ωц и усиливающий его с коэффициентом  ; 7 - усилитель, получающий на вход сигналы V, D, jц и формирующий сигнал
; 7 - усилитель, получающий на вход сигналы V, D, jц и формирующий сигнал  ; 8 - сумматор, получающий на вход сигналы
; 8 - сумматор, получающий на вход сигналы 
 и формирующий сигнал управления jи; 9 - перехватчик; 10 - цель.
и формирующий сигнал управления jи; 9 - перехватчик; 10 - цель.
Эффективность предложенного способа наведения была проверена с помощью имитационного моделирования, при котором имитировалось наведение ЛА на цель, двигающуюся по синусоидальному закону, характерному для некоторых ГЗЛА.
Перечень использованных источников
1. Меркулов В.И., Дрогалин В.В., Миляков Д.А. Проблемы перехвата гиперзвуковых летательных аппаратов. // Фазотрон. 2012. №3. С. 52-54.
2. Меркулов В.И. Динамичность авиационных комплексов и бортовые радиоэлектронные системы. // Радиотехника. 2010. №1. С. 88-96.
3. Ильчук А.Р., Меркулов В.И., Самарин О.А., Юрчик И.А. Влияние интенсивного маневрирования целей на показатели эффективности системы первичной обработки сигналов в бортовых РЛС.// Радиотехника. 2003. №6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перехвата интенсивно маневрирующих высокоскоростных воздушно-космических объектов | 2017 |
|
RU2666069C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ПОВЫШЕННОЙ АДАПТАЦИЕЙ К МАНЕВРУ НОСИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2598001C2 |
| СПОСОБ ПЕРЕХВАТА ПРИОРИТЕТНОЙ ЦЕЛИ, ОБЕСПЕЧИВАЮЩИЙ СРЫВ НАВЕДЕНИЯ ИСТРЕБИТЕЛЕЙ СОПРОВОЖДЕНИЯ | 2020 |
|
RU2742737C1 |
| Способ наведения инерционного летательного аппарата с учетом несоответствия динамических свойств цели и перехватчика | 2019 |
|
RU2727777C1 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОСИ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ СОПРОВОЖДЕНИИ МЕНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 2020 |
|
RU2758446C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571363C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ НАВЕДЕНИИ НА ВОЗДУШНУЮ ЦЕЛЬ | 1999 |
|
RU2189556C2 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |

Изобретение относится к способу самонаведения пилотируемых и беспилотных летательных аппаратов (ЛА) на гиперзвуковые летательные аппараты (ГЗЛА). Для самонаведения летательных аппаратов на наводимом ЛА формируют сигнал управления jи по определенному закону с учетом угла визирования цели, скорости его изменения, постоянной времени объекта управления по угловой скорости курса, коэффициента эффективности перехватчика, углов тангажа цели и перехватчика соответственно, коэффициентов, определяемых решением определенной системы алгебраических уравнений. Дополнительно вычисляют балансировочное значение перегрузки jоз на установившихся режимах полета с учетом маневра цели по определенному закону с учетом углов визирования и скорости его изменения, коэффициентов эффективности перехватчика и цели, постоянной времени объекта по угловой скорости курса. На основе вычисленных значений формируют сигнал управления jи=jн+jоз, который передают в САУ перехватчика для изменения его траектории движения относительно цели. Обеспечивается формирование оптимального сигнала управления ЛА. 6 ил.
Способ эффективного самонаведения пилотируемых и беспилотных летательных аппаратов (ЛА) на гиперзвуковые летательные аппараты (ГЗЛА), заключающийся в том, что на наводимом ЛА формируют сигнал управления по закону

где  - угол визирования цели и скорость его изменения соответственно;
- угол визирования цели и скорость его изменения соответственно;
Kи - коэффициент эффективности перехватчика;
Ти - постоянная времени объекта управления по угловой скорости курса;
ϑц и ϑи - углы тангажа цели и истребителя соответственно;
λ1 и λ0 - коэффициенты, определяемые решением системы алгебраических уравнений
отличающийся тем, что дополнительно вычисляют балансировочное значение перегрузки на установившихся режимах полета с учетом маневра цели по закону
где ϕи, ωи - угол визирования и скорость его изменения;
Kи, Kц - коэффициенты эффективности перехватчика и цели соответственно;
Ти - постоянная времени объекта управления по угловой скорости курса;
D - дальность до цели;
V - скорость сближения с целью,
после чего на основе вычисленных значений jн и jоз формируют сигнал управления по закону
jи=jн+jоз,
который передают в САУ перехватчика для изменения его траектории движения относительно цели.
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИНТЕНСИВНО МАНЕВРИРУЮЩУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2004 |
|
RU2254542C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| СПОСОБ МНОГОСТУПЕНЧАТОЙ ФИЛЬТРАЦИИ ДЛЯ СИСТЕМ АВТОСОПРОВОЖДЕНИЯ | 2015 |
|
RU2616188C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТЫ ПРИ НАВЕДЕНИИ НА МАНЕВРИРУЮЩУЮ ЦЕЛЬ | 2009 |
|
RU2419057C2 |

