Изобретение относится к медицинскому, туристическому и спортивному оборудованию, а именно к коляскам для инвалидов и туристов, велосипедам для туристов и спортсменов.
Известен мускульный привод транспортного средства [1], содержащий раму с колесами, приводной механизм, состоящий из зубчатой рейки, двух шестерен, коромысла, тяги с пазами и опорных роликов для рейки, возвратной пружины, переключателя хода тяги и направляющих зубчатой рейки.
Этот привод имеет низкий КПД его приводного механизма, что создает большие трудности при пользовании им.
Наиболее близкой по технической сущности и достигаемому результату к изобретению является коляска, содержащая раму с сидением, колесами и приводом, включающим два блока, находящихся на оси ведущих колес и связанных с ней муфтами свободного хода, с рамой - гибкими связями, намотанными на них в одном направлении, а между собой - зубчатым зацеплением через коническое зубчатое колесо, установленное на раме с возможностью вращения [2].
В этой коляске имеются достаточно сложные в изготовлении узлы: коническая зубчатая передача и муфты свободного хода.
Применение данного привода позволяет иметь надежный, простой и дешевый в изготовлении, с высоким КПД мускульный привод транспортного средства.
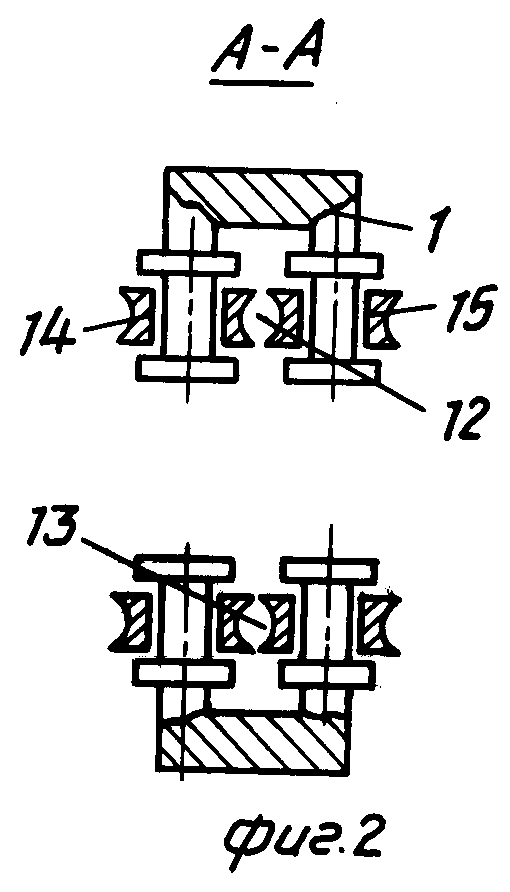
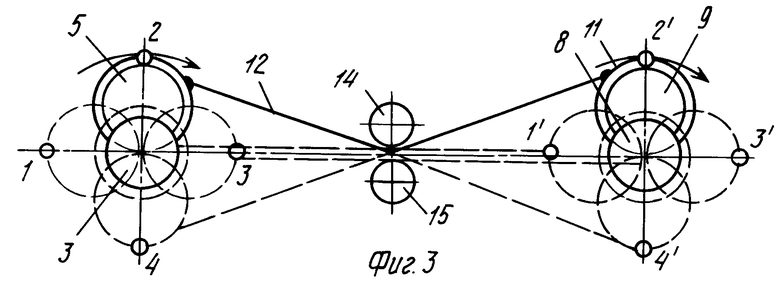
На фиг. 1 показан предлагаемый привод без передней оси и сидения; на фиг. 2 - сечение А-А на фиг.1; на фиг.3 - схема движения втулок, связанных одной гибкой связью, и самой гибкой связи при вращении обеих осей с эксцентриками в одном направлении; на фиг.4 - то же, при вращении их в разных направлениях.
Привод выполнен, например, в виде трех- или четырехколесной коляски и содержит раму 1, на которой в подшипниках 2 находится ведущая ось 3, жестко связанная с колесами 4. Ось 3 имеет два эксцентрика 5 и 6, оси которых лежат в одной плоскости по обе стороны от оси вращения оси 3 и в одной плоскости с ней. Параллельно оси 3 в раме в подшипниках 7 находится ось 8 с такими же как эксцентрики 5 и 6 эксцентриками 9 и 10.
На эксцентриках 5,6,9 и 10 находятся с возможностью соосного вращения втулки 11, попарно соответственно связанные между собой гибкими связями 12 и 13: на эксцентрике 5 - на эксцентрике 9, на эксцентрике 6 - на эксцентрике 10. Посредине между осями 3 и 8 каждая гибкая связь 12 и 13 находится между двумя блоками 14 и 15, находящимися в одной плоскости и одновременным касанием своей гибкой связи 12 или 13 с возможностью вращения на раме 1. Точки гибких связей 12 и 13 при прохождении их через блоки 14 и 15 находятся в плоскости, проходящей через оси вращения осей 3 и 8, при любых направлениях их вращения за счет положения блоков 14 и 15 на одном расстоянии от этой плоскости их точек поверхностей, находящихся на расстоянии наибольшего сближения.
На оси 8 закреплена ее концами гибкая связь 16 и навита на ней в разных для обоих концов направлениях с максимальным количеством витков 1-15. Гибкая связь 16 проходит через блок 17, находящийся на раме с возможностью вращения. По обе стороны от блока на гибкой связи 16 закреплены рукояти 18. Гибкие связи 12, 13 и 16 выполнены, например, шнурами или же тросиками.
Движение коляски осуществляется за счет возвратно-поступательного движения рукоятками 18 вдоль гибкой связи 16 сидящим в ней. При этом ось 8 совершает возвратно-вращательное движение в пределах навивки гибкой связи 16-1-15 оборотов. Такое вращение оси 8 синхронно через гибкие связи 12, 13 при вращении втулок 11 на своих эксцентриках 5, 6, 9 и 10 передается на ось 3, которая и при реверсе этого движения не меняет направления своего вращения за счет того, что гибкие связи 12 и 13 имеют блоки 14 и 15, которые создают траекторию движения точек гибких связей 12, 13, показанную последовательно по четырем точкам через каждые 90о вращения осей 3 и 8 соответственно 1-4 и 11-41 (на фиг.3,4 для обоих случаев: совпадения и несовпадения направления вращения осей 3 и 8).
Кроме того, для предотвращения передачи реверса вращения с оси 8 на ось 3 этот реверс вращения оси 8 должен происходить вблизи или на точках 1, 11, 3, 31. Для этого ход рукояток 18 должен быть регламентирован упорами. Прохождению этих реверсов способствует инерция вращения и движения всех элементов коляски и при большом количестве оборотов оси 8 в одном направлении за один период эта инерция настолько велика, что реверса вращения оси 3 от реверса вращения оси 8 может и не наступать даже при самых неблагоприятных условиях.
Для изменения направления движения коляски или при движении коляски с места, когда она начала двигаться не вперед, а назад, нужно резко изменить направление движения рукоятками 18 в положении между реверсами их движения при положении втулок 11 подальше от точек 1, 11, 3, 31.
Применение данного привода позволяет иметь мускульный привод транспортного средства, простой и дешевый, с высоким КПД и малым весом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2043240C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2047533C1 |
| Привод транспортного средства, приводимый в действие мускульной силой человека | 1990 |
|
SU1803342A1 |
| РОЛЛЕР | 1992 |
|
RU2043239C1 |
| Коляска | 1989 |
|
SU1683741A1 |
| Коляска-веломобиль | 1989 |
|
SU1698544A1 |
| Мускульный привод транспортного средства | 1988 |
|
SU1688869A1 |
| Инвалидная коляска | 1989 |
|
SU1789212A1 |
| Велосипед | 1991 |
|
SU1836248A3 |
| Привод | 1989 |
|
SU1787222A3 |


Использование: мускульный привод транспортного средства относится к медицинскому, туристическому и спортивному оборудованию, а именно к коляскам для инвалидов и туристов, велосипедам для туристов и спортсменов. Сущность: мускульный привод содержит ведущую ось с двумя эксцентриками, оси которых лежат в одной плоскости с этой осью по разные от нее стороны. Ведущая ось жестко связана с колесами. Параллельно ведущей оси с возможностью вращения на раме находится другая ось с такими же эксцентриками, на которой закреплена концами и навита в разных направлениях гибкая связь, проходящая через блок, по обе стороны от которого на ней закреплены рукоятки. На эксцентриках с возможностью вращения находятся втулки, попарно с разных осей связанные между собой гибкими связями, каждая из которых проходит через устройство, управляющее траекторией ее движения в сторону плоскости, в которой лежат оси вращения обоих осей, и выполненное в виде, например, двух блоков, находящихся в одной плоскости и взаимодействующих с одной гибкой связью. 4 ил.
МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА, имеющего раму и колеса, содержащий ведущую ось с симметрично размещенными на ней двумя втулками, гибкие связи, соединяющие втулку с рамой, ведомую ось, расположенную на раме с возможностью вращения параллельно ведущей оси, отличающийся тем, что он снабжен дополнительной парой втулок, размещенных на ведомой оси, устройством, направляющим траектории движения гибких связей в плоскости размещения осей вращений обеих осей, выполненных, например, в виде двух блоков, установленных с возможностью вращения на раме в одной плоскости с осями и взаимодействия с соответствующими гибкими связями, дополнительного блока, установленного на раме и связанного с ведомой осью дополнительной гибкой связью, концы которой навиты на ведомую ось в разных направлениях, и рукояток, расположенных по обе стороны от дополнительного блока с возможностью взаимодействия с соответствующими ветвями дополнительной гибкой связи, при этом обе оси выполнены с эксцентриками, попарно расположенными с противоположных относительно осей вращения сторон, а втулки и дополнительные втулки размещены на эксцентриках с возможностью вращения и связаны через блок гибкими связями.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1693741, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
