Изобретение относится к медицинскому, туристическому и спортивному оборудованию, а именно к коляскам для инвалидов и туристов, велосипедам для туристов и спортсменов.
Известны различные средства передвижения инвалидов. Например известна инвалидная коляска, содержащая установленную на ведущих и ведомых колесах раму с сиденьем и привод, включающий рычаг с рукояткой на конце, ведущие колеса закреплены на раме посредством эксцентричных осей, а рычаг привода выполнен упругим, жестко закреплен одним концом к центру ведущего колеса и расположен радиально.
Недостатком этой коляски является отсутствие редуцирующего устройства, скорость вращения рычага соответствует скорости вращения ведущего колеса.
Наиболее близким по технической сущности и достигаемому результату к изобретению является привод, приводимый в действие мускульной силой человека. Мускульный привод транспортного средства, содержащий ведущую ось с колесами, выполненную с двумя эксцентриками с втулками, оси которых лежат в одной плоскости с ведущей осью по обе стороны от нее и связаны с пластинами, имеющими вырезы, находящимися на раме с возможностью возвратно-поступательного движения и связанными между собой гибкими связями, проходящими через блоки, находящиеся на раме с возможностью вращения.
Недостатком этого привода является наличие в его конструкции пересечения синусоидальных кривых канавок и элемента, имеющего в поперечном сечении эллипс, создающих ненадежность конструкции и уменьшающих КПД привода.
Сущность изобретения в том, что привод содержит ведущую ось с колесами, находящуюся на раме с возможностью вращения и выполненную с двумя эксцентриками с втулками на них, оси которых лежат в одной плоскости с ведущей осью по разные стороны от нее. Каждый эксцентрик с втулкой находится в синусоидальном вырезе своей пластины и взаимодействует с ней через втулку. Эти вырезы имеют одинаковые синусоидальные кривые, начинающиеся и заканчивающиеся на экстремальные точки их вершин. Обе кривые повернуты относительно друг друга в противофазу 180о. Изобретениe имеет два варианта выполнения, которые отличаются формой осевой линии этих синусоидальных кривых. По первому варианту это дуга с центром ее окружности на оси вращения педалей, жестко связанных каждая со своей пластиной и между собой через гибкую связь, проходящую через блок. По второму варианту это прямая, лежащая в плоскости, в которой находятся в раме с возможностью возвратно-поступательного движения эти пластины, которые связаны с ножными упорами и между собой с двух сторон двумя гибкими связями, проходящими через блоки.
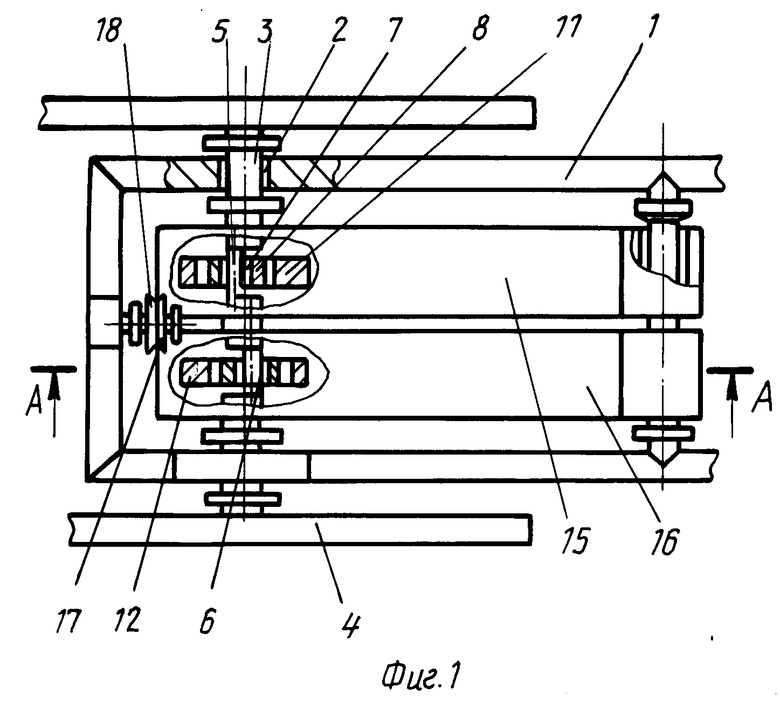
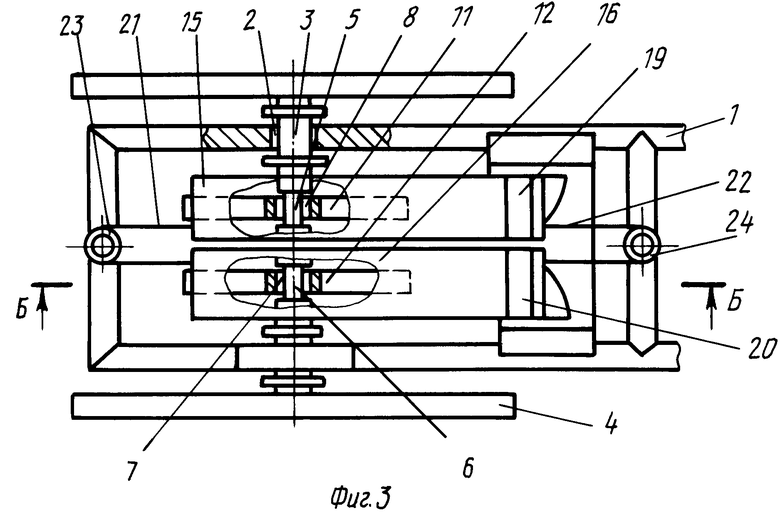
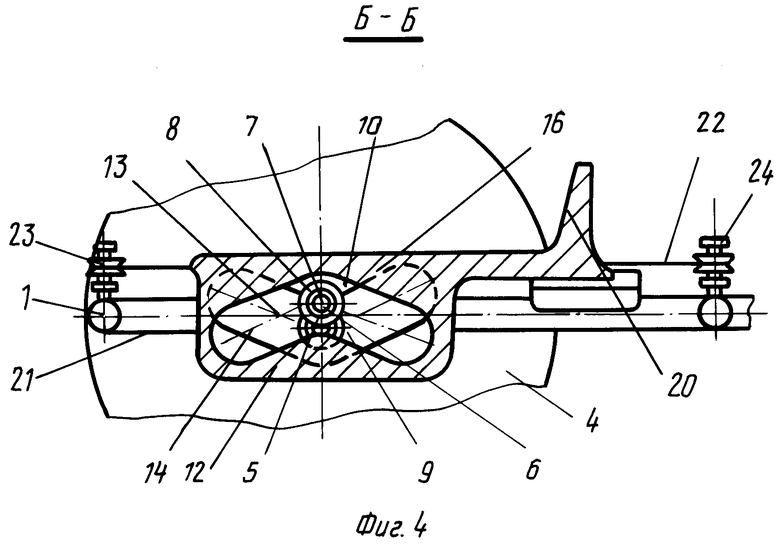
На фиг. 1 схематично показан привод по первому варианту выполнения без передней оси и сиденья; на фиг.2 разрез А-А на фиг.1; на фиг.3 то же, что и на фиг.1 по второму варианту выполнения; на фиг.4 разрез Б-Б на фиг.3.
Привод по первому варианту выполнен, например, в виде трех- или четырехколесной коляски и содержит раму 1, на которой в подшипниках 2 находится ведущая ось 3, жестко связанная с колесами 4. Ось 3 имеет два эксцентрика 5 и 6, оси которых находятся в одной плоскости с осью 3 и по разные стороны от нее. На эксцентриках 5 и 6 на подшипниках 7 находятся втулки 8, с которыми эксцентрики 5 и 6 находятся соответственно в вырезах 9 и 10 соответственно пластин 11 и 12. Вырезы 9 и 10 выполнены соответственно по синусоидальным кривым 13 и 14, которые одинаковы, находятся по отношению одна к другой в противофазе (повернутыми на 180о), начинаются и заканчиваются экстремальными точками вершин. Осевые линии кривых 13 и 14 это дуга, центр окружности которой лежит на оси вращения педалей 15 и 16, жестко связанных соответственно с пластинами 11 и 12 и находящихся одним концом с возможностью этого вращения на раме 1, а другим концом пластины 11 и 12 связаны друг с другом гибкой связью 17, выполненной, например, в виде шнура или тросика и проходящей через блок 18, находящийся на раме 1 с возможностью вращения.
Выполнение изобретения по второму варианту отличается тем, что осевая линия кривых 13 и 14 прямые, лежащие в плоскости, в которой находятся педали 15 и 16 на раме 1 с возможностью возвратно-поступательного движения. По этому варианту педали 15 и 16 жестко связаны соответственно с ножными упорами 19 и 20, а между собой с обеих сторон двумя гибкими связями 21 и 22, такими же как гибкая связь 17, проходящими через блоки 23 и 24 соответственно, находящимися на раме 1 с возможностью вращения.
Движение коляски по первому варианту осуществляется за счет возвратно-вращательного движения в противофазе педалей 15 и 16 через гибкую связь 17 сидящим на высоком сидении (не показано) или стоящим в коляске человеком, опирающимся при этом на руль (не показан). Это движение педалей 15 и 16 через взаимодействие вырезов 9 и 10 соответственно с втулками 8 эксцентриков 5 и 6 преобразуется во вращательное движение с постоянной скоростью в одном направлении оси 3 с колесами 4. При этом пластины 11 и 12 поочередно друг к другу становятся ведущими и ведомыми, что обеспечивает одинаковость направления воздействия крутящего момента на ось 3. Амплитуда движения педалей при этом должна быть постоянной: от начала и до конца кривых 13 и 14. Это легко сделать за счет выполнения утолщения на гибкой связи 17 и упоров для него на раме 1 (не показано, кроме того, при достаточных навыках езды на коляске они и не нужны), которые ограничивают движение гибкой связи 17 в необходимых пределах, а с ней и возвратно-вращательное движение педалей 15 и 16. Для изменения направления движения коляски или при обнаружении, что коляска с места стала двигаться не в том направлении, которое необходимо для реверса движения коляски, делается резкий реверс движения педалями 15 и 16 в положении нахождения эксцентриков 5 и 6 на соответственно кривых 13 и 14 между их экстремальными точками вершинами. За один ход педали 15 или 16 ось 3 совершает столько оборотов, сколько периодов кривой 13 или 14.
Движение коляски по второму варианту осуществляется таким же образом, но уже через ножные упоры 19 и 20. При этом сиденье для удобства и эффективности работы ногами должно быть низким (не показано). При этом гибкие связи 21 и 22 обеспечивают надежность этой работы. Для ограничения их движения для движения втулок 8 по кривым 13 и 14 из одного их конца в другой на гибких связях 21 и 22 могут быть выполнены такие же, как и по первому варианту, утолщения и упоры на раме 1 (не показаны).
Применение изобретения позволяет иметь простой и надежный с высоким КПД мускульный привод транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028960C1 |
| Привод транспортного средства, приводимый в действие мускульной силой человека | 1990 |
|
SU1803342A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2047533C1 |
| Коляска-веломобиль | 1989 |
|
SU1698544A1 |
| РОЛЛЕР | 1992 |
|
RU2043239C1 |
| Велосипед | 1991 |
|
SU1836248A3 |
| Коляска | 1989 |
|
SU1683741A1 |
| Инвалидная коляска | 1989 |
|
SU1789212A1 |
| Мускульный привод транспортного средства | 1988 |
|
SU1688869A1 |
| Привод | 1989 |
|
SU1787222A3 |

Использование: в медицинском, туристическом и спортивном оборудовании, а именно в колясках для инвалидов и туристов, велосипедах для туристов и спортсменов. Сущность изобретения: привод содержит ведущую ось с колесами, выполненную с двумя эксцентриками с втулками, оси которых лежат в одной плоскости с ведущей осью по обе стороны от нее, взаимодействующими с пластинами, находящимися на раме с возможностью возвратно-вращательного или возвратно-поступательного движения и связаны между собой через нажимные детали и гибкие связи, проходящие через блоки, находящиеся на раме с возможностью вращения. Связь пластин с эксцентриками, с втулками осуществляется через синусоидальные вырезы в пластинах, с которыми взаимодействуют эксцентрики через втулки. Эти вырезы имеют одинаковые синусоидальные кривые, начинающиеся и заканчивающиеся в экстремальных точках вершин и находящиеся между собой в противофазе. 4 ил.
МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА, содержащий ведущую ось с колесами, выполненную с двумя эксцентриками с втулками, оси которых лежат в одной плоскости с ведущей осью по обе стороны от нее и связаны с пластинами, имеющими вырезы, находящимися на раме с возможностью возвратно-поступательного движения и связанными между собой гибкими связями, проходящими через блоки, находящиеся на раме с возможностью вращения, отличающийся тем, что эксцентрики с втулками расположены каждый в синусоидальном вырезе своей пластины, выполненные в виде синусоидальных участков кривых, каждая пара которых расположена в противофазе друг другу, при этом каждая точка контакта эксцентриков с синусоидальными участками расположена на их вершинах, а ось этих кривых выполнена в виде прямой, проходящей через ось вращения ведущих колес.
| Привод транспортного средства, приводимый в действие мускульной силой человека | 1990 |
|
SU1803342A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
