Изобретение относится к электротехнике и может найти применение в автоматизированных технологических и других промышленных установках.
Целью изобретения является повышение быстродействия при одновременном упрощении конструкции.
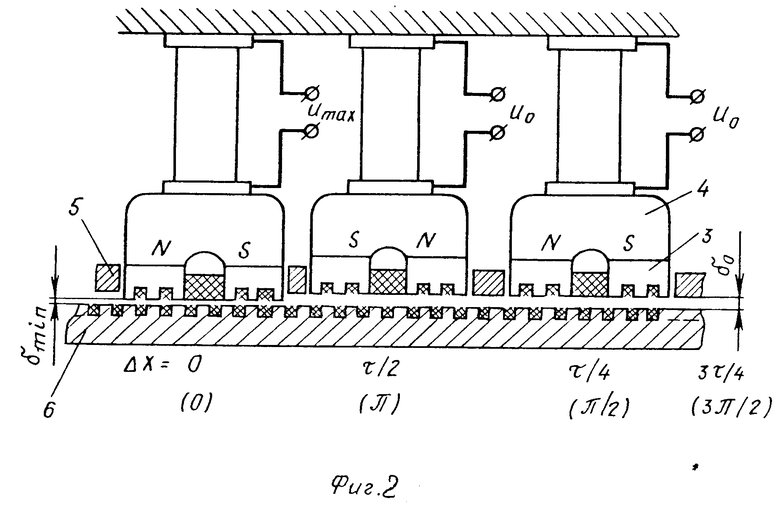
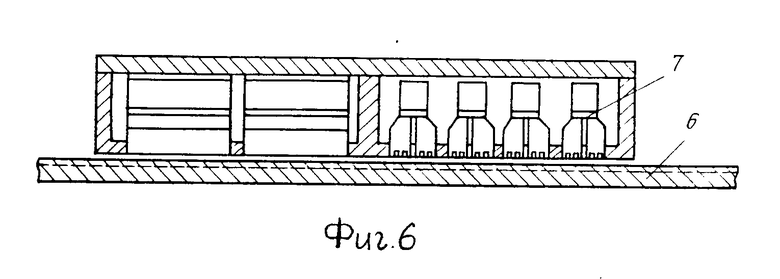
На фиг. 1 и 2 изображены варианты выполнения элементарных узлов с закреплением зубчатых полюсов с одинаковым сдвигом с пьезоэлементом в корпусе якоря: на фиг. 1 - при промежуточном положении постоянного магнита, на фиг. 2 - при верхнем положении постоянного магнита; на фиг. 3 и 4 - однокоординатный линейный шаговый электродвигатель; на фиг. 5 и 6 - двухкоординатный линейный шаговый электродвигатель.
В линейном шаговом электродвигателе каждый пьезоэлемент 1 укреплен в крышке 2 корпуса якоря и неподвижно соединен с группой зубчатых полюсов 3, имеющих одинаковый сдвиг (фиг. 1), либо с постоянным магнитом 4 (фиг. 2), который в свою очередь неподвижно соединен с группой зубчатых полюсов 3, т. е. каждый пьезоэлемент 1 размещен между крышкой 2 и группой зубчатых полюсов 3. Группы зубчатых полюсов 3 укреплены в днище 5 корпуса якоря с возможностью вертикального перемещения. Якорь с помощью опор, обычно магнитовоздушных, отделен от магнитомягкого зубчатого индуктора 6 (с величиной зубцового деления τ, равным зубцовому делению полюсов якоря) с рабочим воздушным зазором δ. Каждая группа полюсов 3 имеет сдвиг по нарезке ΔX = 0; τ/2 ; τ/4 и 3τ/4 (последняя группа на фиг. 1 и 2 не показана).
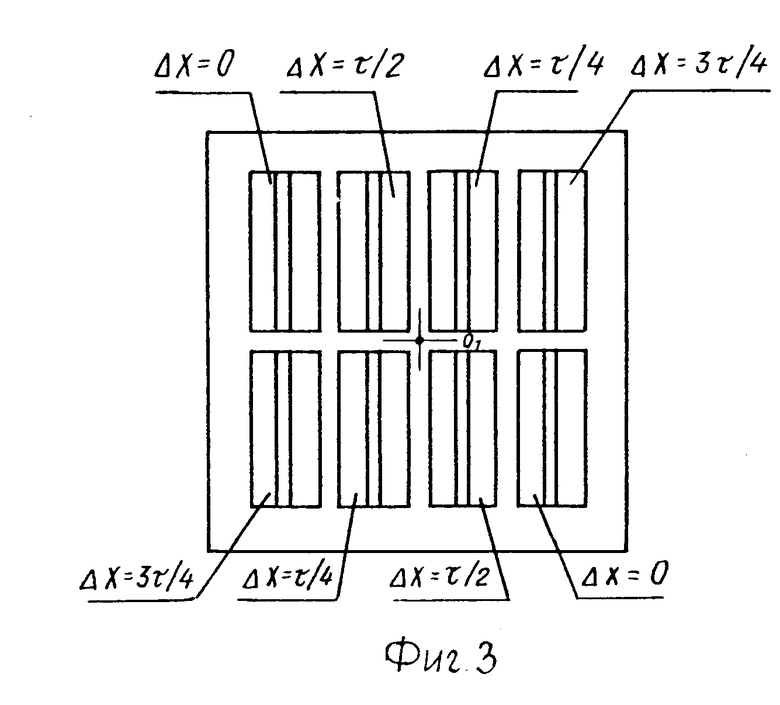
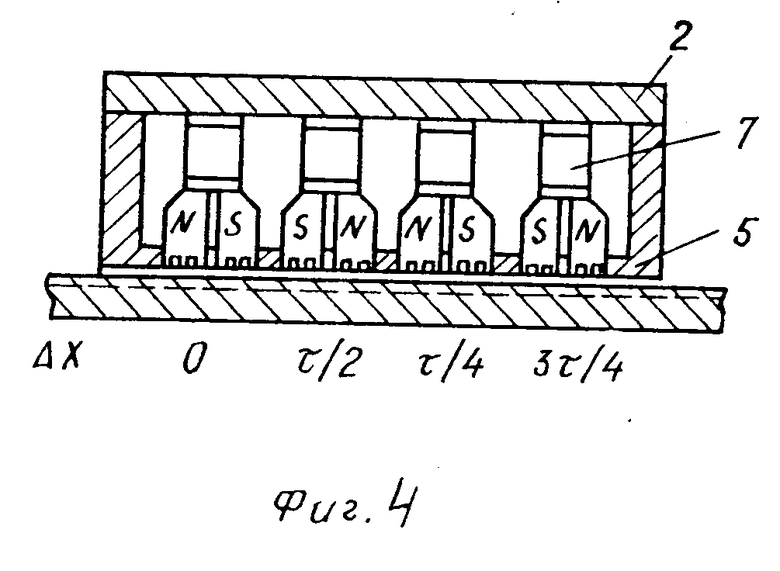
Однокоординатный линейный шаговый электродвигатель (см. фиг. 3 и 4) в якоре содержит несколько элементарных узлов 7, число которых равно или кратно числу фаз двигателя. Элементарные узлы с группой полюсов одноименного значения сдвига ΔX = 0 ; τ/2; τ/4 и 3τ/4 (что соответствует сдвигам в электрических радианах ΔX = 0, π; π/2; 3 π /2) размещены симметрично относительно центра О1 масс якоря.
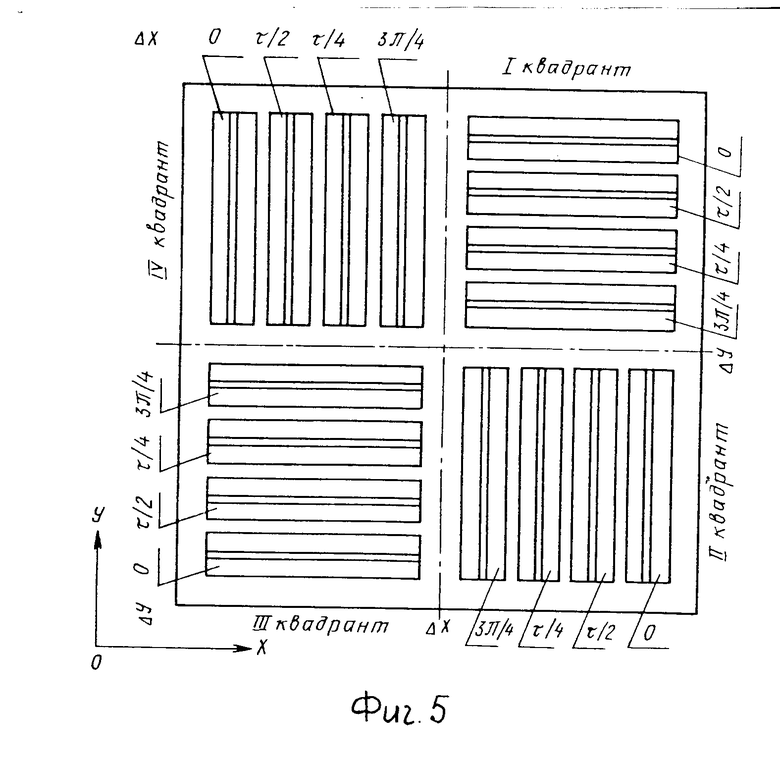
Двухкоординатный линейный шаговый электродвигатель (см. фиг. 5 и 6) содержит две системы элементарных узлов, ориентированных вдоль оси X (I и III квадранты) и вдоль оси Y (II и IV) квадранты), причем элементарные узлы, имеющие одинаковые направленность и сдвиг зубчатых полюсов и принадлежащие разным квадрантам, размещены симметрично относительно геометрического центра О2 якоря.
Линейный шаговый электродвигатель работает следующим образом.
Исходное фиксированное состояние определяется взаимодействием групп полюсов с одинаковым сдвигом, на пьезоэлементы которых подано максимальное напряжение Umax (на фиг. 1 и 2 - это группа полюсов с ΔX = 0). Полюса этих групп максимально опущены до оптимального зазора δmin. На остальные пьезоэлементы напряжение либо не подается (Uо = 0), либо подается максимальное напряжение отрицательной полярности (Uo =-Umax). При этом их группы полюсов максимально подняты до максимального зазора δo.
Взаимодействие полюсов поднятых групп с индуктором минимально, так как тангенциальное усилие, развиваемое ими, определено таким соотношением τ/δ, которое стремится к О. Известно, что при таком соотношении τ/δ развиваемое тангенциальное (рабочее) усилие также стремится к нулю.
На практике, когда линейный шаговый двигатель работает на аэростатической опоре с номинальным зазором δmin = 1, мкм. Подъем полюсов до зазора δo = 80 мкм уменьшает рабочее усилие в 5 раз.
Таким образом, при исходном статическом состоянии, определенном взаимодействием опущенных групп полюсов с ΔX = 0, якорь занимает положение в соответствии с продольным (согласным) расположением зубцов этих полюсов и зубцов индуктора.
Для реализации шагового перемещения в простейшем случае коммутации следует поднять группу полюсов с Δ X = 0 и одновременно опустить группу полюсов с ΔX = τ/4 или ΔX = 3 τ /4 (в зависимости от выбранного направления движения). Для этого напряжение на пьезоэлементе группы с ΔX = 0 изменяется с Umax на Uо, а напряжение на пьезоэлементе с полюсной группой или 3 τ/4 изменяется с Uо на Umax.
Вновь опущенная группа полюсов в силу имеющегося сдвига по нарезке ΔX заставит якорь переместиться на величину единичного шага α=τ/4.
Последовательно производя такие операции со всеми группами зубчатых полюсов, получают шаговое движение двигателя.
По способам коммутации двигатель приспособлен к любому, используемому в настоящее время, т. е. к парной, поочередной коммутации, к коммутации с дробнением шага и т.д.
Двигатель может выполняться с любым числом фаз m от m = 3 и выше. При этом взаимные сдвиги полюсных групп подчиняются тем же соотношением, что и в обычном шаговом двигателе (ШД) ΔX = τ /m.
Двухкоординатный вариант двигателя построен аналогично однокоординатному, но на индукторе осуществлена взаимно пересеченная нарезка зубцов.
Симметрирование полюсных групп с одинаковым сдвигом выполняется для поддержания равномерности рабочего зазора в случае применения аэростатических опор. Действительно, при опускании групп полюсов с определенным значением сдвига увеличивается не только тангенциальная, но и нормальная сила взаимодействия этой группы с магнитомягким индуктором.
Для избежания возможных перекосов, могущих привести к потере работоспособности двигателя (например, если в какой-либо точке δ MIN достигнет нуля), группы полюсов с одинаковым сдвигом по нарезке зубцов (синхронного опускаемых и поднимаемых) располагаются симметрично относительно центра масс якоря.
Изобретение позволяет существенно упростить конструкцию электродвигателя, исключив систему обмоток возбуждения на полюсах и систему их коммутации и снизив тем самым инерционность двигателя, повысить быстродействие электропривода, что в свою очередь приводит к росту производительности автоматизированных устройств. Кроме того, сокращается число трудоемких намоточных операций при изготовлении двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2030080C1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Двухкоординатный шаговый электродвигатель | 1983 |
|
SU1201971A1 |
| Многокоординатный шаговый электродвигатель | 1983 |
|
SU1119131A1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Многофазный линейный шаговый двигатель | 1981 |
|
SU1001349A1 |
Использование: в качестве электропривода в автоматизированных технологических и других промышленных установках. Сущность изобретения: в предложенном шаговом электродвигателе вместо системы обмоток возбуждения на полюсах и системы их коммутации введены пьезоэлементы 1, размещенные между группами полюсов 3 с одинаковым сдвигом по нарезке зубцов и крышкой 2. Группы полюсов 3 укреплены в днище 5 корпуса якоря с возможностью вертикального перемещения корпуса якоря. Это упрощает конструкцию и повышает быстродействие. 1 з.п. ф- лы, 6 ил.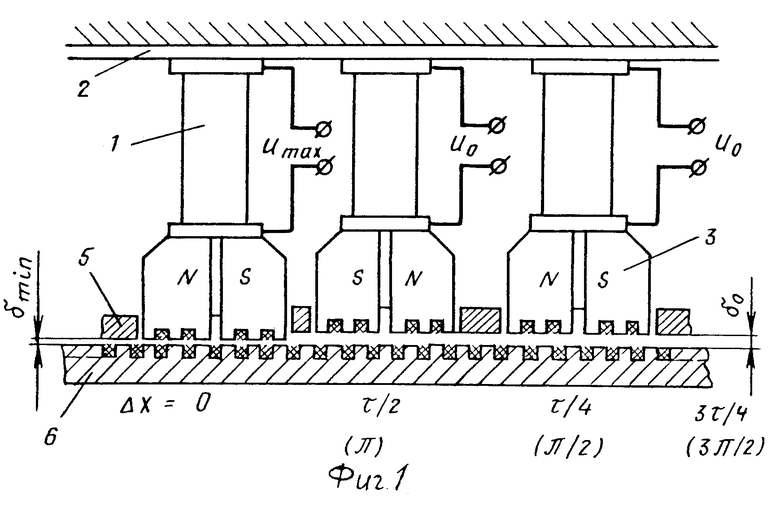
| Итоги науки и техники | |||
| т | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| М.: ВИНИТИ, 1978, с.72-73. | |||
