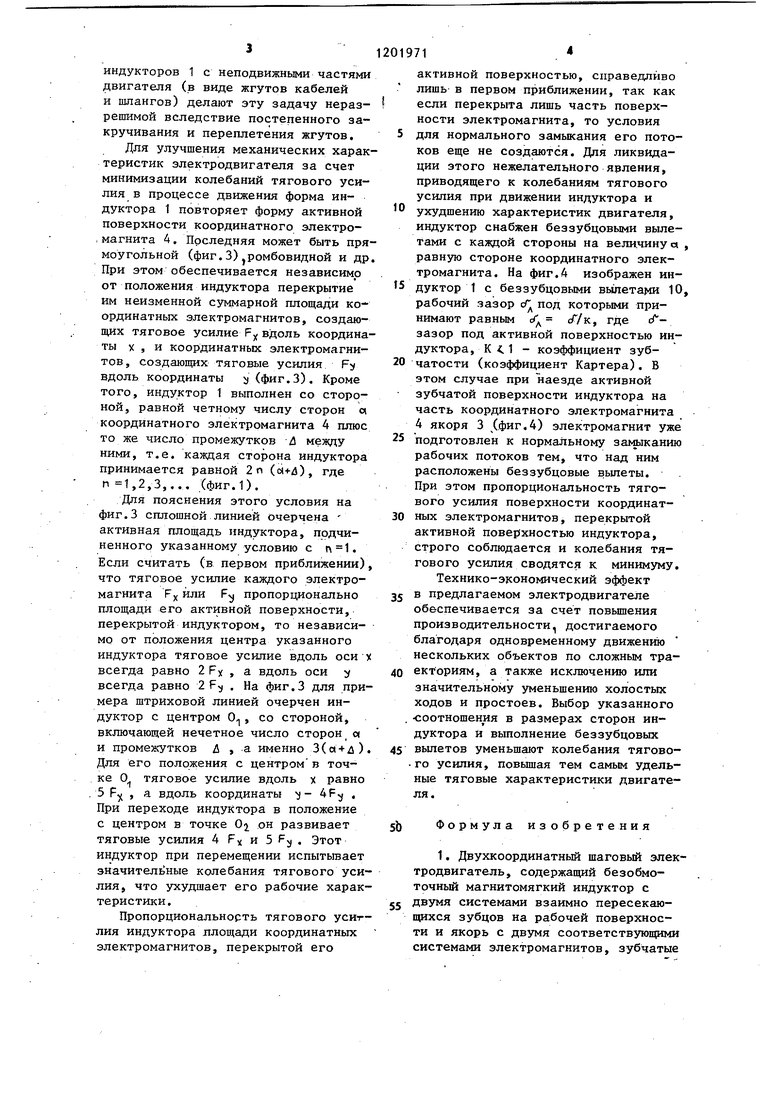
Изобретение относится к электротехник.:, в частности, к двухкоординатным шаговым электродвигателям, используемым в системах автоматики для программного перемещения объектов в плоскости без использования кинематических преобразователей - движений-. Целью изобретения является расши рение функциональных возможностей путем реализации сложных цикличес, «rfx- -и взаимно, пересекающихся тра....-екторий движения. ij,:; ф... i показан двухкоординат.U4 аа,|. оьый электродвигатель, обb.i.si/i вид, на фИ1.2 - вариант электро д игателя с несколькими индукторами и якорем кольцеобразной формы; на i;Hi . 3 - ряд B3aHiviHbix положений индуктора и якоря на фиг.4 - индукто с беззубцоЕыми вьщетами на каждой стороне.. Электродвигатель (фиг.1) содер/iJiT безо.бмоточный магнитомягкий аггоский индуктор 1 с двумя системами взаимно пересекающихся зубцов 2 иа рабочей поверхности и активный якорь 3 с равномерно распределен.ыми Ли рабочей поверхности и чередующимися в направлениях нарезки Зубцов координатными зубчатыми элек тромягнитами 4. Индуктор 1 выполнен площадью меньшей, чем площадь якоря и перекрывает лишь часть координатных электромагнитов 4. Координатные электромагниты 4 могут быть любого типа из.применяемых в известных двухкоординатных шаговых электродвигателях. На фиг. и 4 длхЧ примера показан двухфазный координатный электромагнит 4, содержащий два П-образных зубчатых м нитопровода 5 с фазными обмотками разделенных постоянным магнитом 7 возбуждеия. На рабочей поверхности якоря тмеются отверстия 8 аэростатических опор, воздух к которым вместе с электропитанием электромагнитов, подводится через жгут 9. Рабочие зубчатые поверхност индук тора 1 и якоря 3 залиты компаундом и отшлифованы шш нормальной работы аэростатических опор,-которые обес печивают рабочий зазор в электродви гателе 10--20 мкм. Дву:-.координатньй шаговый электродвигатель работает следунщим об pa.iori. Коммутация ф.аз 6 электромагнитов 4 одновременная или выборочная (что определяется программой работы системы управления) приводит к созданию дискретно перемещающегося вдоль поверхности якоря 3 двухкоординатного магнитного поля, которое при взаимодействии.с рабочей поверхностью индуктора 1 заставляет последний перемещаться в плоскости по требуемой программой коммутации траектории. С энергетической точки -зрения целесообразнее коммутировать (возбуз здать) фазы 6 лишь у части координатных электромагнитов 4, расположенных в данный момент под индукто-. ром 1, и смежных с ними электромагнитов, расположенных по ходу требуемой программой траектории движения (с последующим подключением б.олее дальних электромагнитов на пути этой траектории). Однако реализация этого способа требует более сложной схемы управления. Подвижный индуктор 1 с р-еНьшей, чем якорь 3, не имеет подводящих кабелей и шлангов, т.е. ме(ханически свободен, параметры его движения определяются законом коммутации фаз координатных электромагнитов неподвижного якоря, поэтому он может совершать перемещения вдоль поверхности последнего по любой замкнутой циклически повторяющейся траектории.(с частыми циклами и повторами) независимо от конфигурации рабочей поверхности якоря. Число индукторов 1 молсет быть произвольным так и форма поверхности якоря 2, например кольцевая (фиг.2). Такие двигатели необходимы для создания роботизированных комплексов и участков в гибких автоматизированных.производствах (например, по изготовлению и сборке радиодеталей). Одновременные взаимные перемещения деталей с учетом необходимости операций загрузки, выгрузки, отбраковки и т.д. в ходе производственного процесса, достаточно сложны. При их движении по замкнутому кольцеобразному контуру траектории могут пересекаться, содержать частные циклические кольцевые участки с взаимной сменой мест (стрелки на фиг.2), Следовательно наличие механических связей
индукторов 1 с неподвижными частями двигателя (в виде жгутов кабелей и шлангов) делают эту задачу неразрешимой вследствие постепенного закручивания и переплетения жгутов,
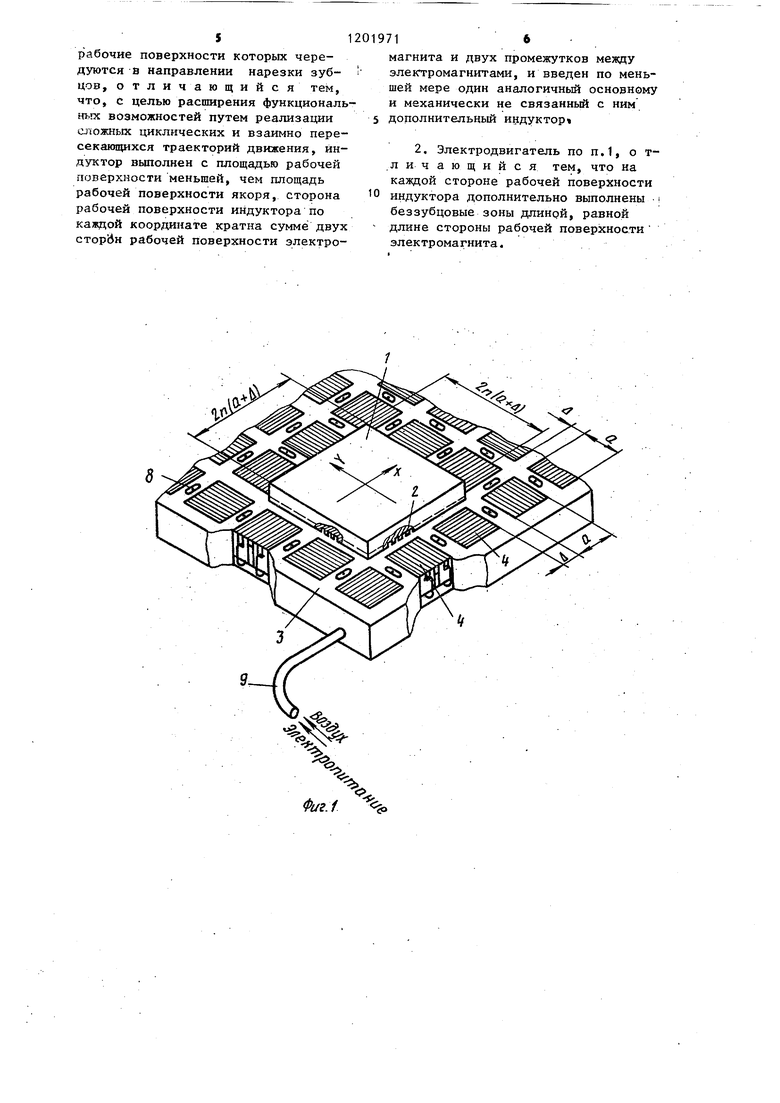
Для улучшения механических характеристик электродвигателя за счет минимизации колебаний тягового усилия в процессе движения форма индуктора 1 повторяет форму активной поверхности координатного электро.магнита 4, Последняя может быть прямоугольной (фиг.3)jромбовидной и др. При этом обеспечивается независимо от положения индуктора перекрытие им неизменной суммарной площади координатных электромагнитов, создающих тяговое усилие F вдоль координаты X , и координатных электромагнитов, создающих тяговые усилия F вдоль координаты у(фиг.З). Кроме того, индуктор 1 выполнен со стороной, равной четному числу сторон а координатного электромагнита 4 плюс то же число промежутков и между ними, т.е. каждая сторона индуктора принимается равной 2п (й-i-d), где п 1,2,3,... (фиг.1).
Для пояснения этого условия на фиг.З сплошной линией очерчена активная площадь индуктора, подчиненного указанному условию с . Если считать (в первом приближении), что тяговое усилие каждого электромагнита FX или f-j пропорционально площади его активной поверхности, перекрытой индуктором, то независимо от положения центра указанного индуктора тяговое усилие вдоль оси X всегда равно 2 Ру , а вдоль оси у всегда равно 2 Ру . На фиг.З для примера штриховой линией очерчен индуктор с центром 0, со стороной, включающей нечетное число сторон а и промежутков Л , а именно 3() Для его положения с центромв точке О тяговое усилие вдоль х равно 5 Р , а вдоль координаты у- 4Рч; . При переходе индуктора в положение с центром в точке Oj он развивает тяговые усилия 4 Р и 5 F( . Этот индуктор при перемещении испытьтает значительные колебания тягового усилия, что ухудшает его рабочие характеристики.
Пропорциональнорть тягового уситлия индуктора ллощади координатных электромагнитов, перекрытой его
активной поверхностью, справедливо лишь в первом приближении, так как если перекрыта лишь часть поверхности электромагнита, то условия
для нормального замыкания его потоков еще не создаются. Для ликвидации этого нежелательного явления, приводящего к колебаниям тягового усилия при движении индуктора и
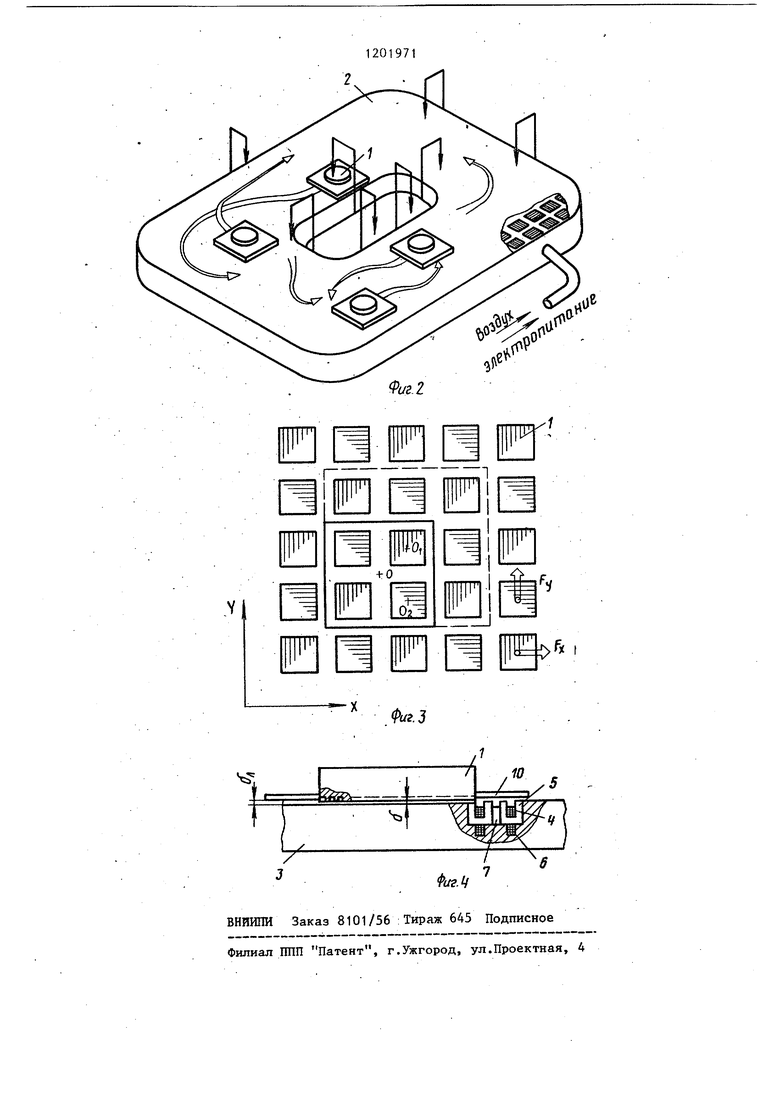
ухудшению характеристик двигателя, индуктор снабжен беззубцовыми вылетами с каждой стороны на величину а , равную стороне координатного электромагнита. На фиг.4 изображен индуктор 1 с беззубцовыми вылета ш 10, рабочий зазор f под которыми принимают равным cf сГ/к, где зазор под активной поверхностью индуктора, К . 1 - коэффициент зубчатости (коэффициент Картера). В этом случае при наезде активной зубчатой поверхности индуктора на часть координатного электромагнита 4 якоря 3 (фиг.4) электромагнит уже
подготовлен к нормальному за№1канию
рабочих потоков тем, что над ним расположены беззубцовые вылеты. При этом пропорциональность тягового усилия поверхности координатных электромагнитов, перекрытой активной поверхностью индуктора, строго соблюдается и колебания тягового усилия сводятся к минимуму. Технико-экономический эффект
в предлагаемом электродвигателе обеспечивается за счет повьш1ения производительности, достигаемого благодаря одновременному движению нескольких объектов по сложным траекториям, а также исключению или значительному уменьшению холостых ходов и простоев. Выбор указанного -соотношения в размерах сторон индуктора и выполнение беззубцовых
вылетов уменьшают колебания тягового усилия, повышая тем самым удельные тяговые характеристики двигателя.
Формула изобретения
5b
1. Двухкоординатный шаговый электродвигатель, содержащий безобмоточньй магнитомягкий индуктор с двумя системами взаимно пересекающихся зубцов на рабочей поверхности и якорь с двумя соответствующими системами электромагнитов, зубчатые
51
рабочие поверхности которых чередуются в направлении нарезки зубцов, отличающийся тем, что, с целью расширения функциональHh.x возможностей путем реализации сложных циклических и взаимно пересекающихся траекторий движения, индуктор выполнен с площадью рабочей поверхности меньшей, чем площадь рабочей поверхности якоря, сторона рабочей поверхности индуктора по калздой координате кратна сумме двух сторЙн рабочей поверхности электро19716
магнита и двух промежутков между
электромагнитами, и введен по меньшей мере один аналогичный основному и механически не связанный с ним 5 дополнительный индуктор
2, Электродвигатель по п.1, о т.л и ч а ю щ и и с я тем, что на каждой стороне рабочей поверхности 10 индуктора дополнительно выполнены
беззубцовые зоны длиной, равной - длине стороны рабочей поверхности электромагнита.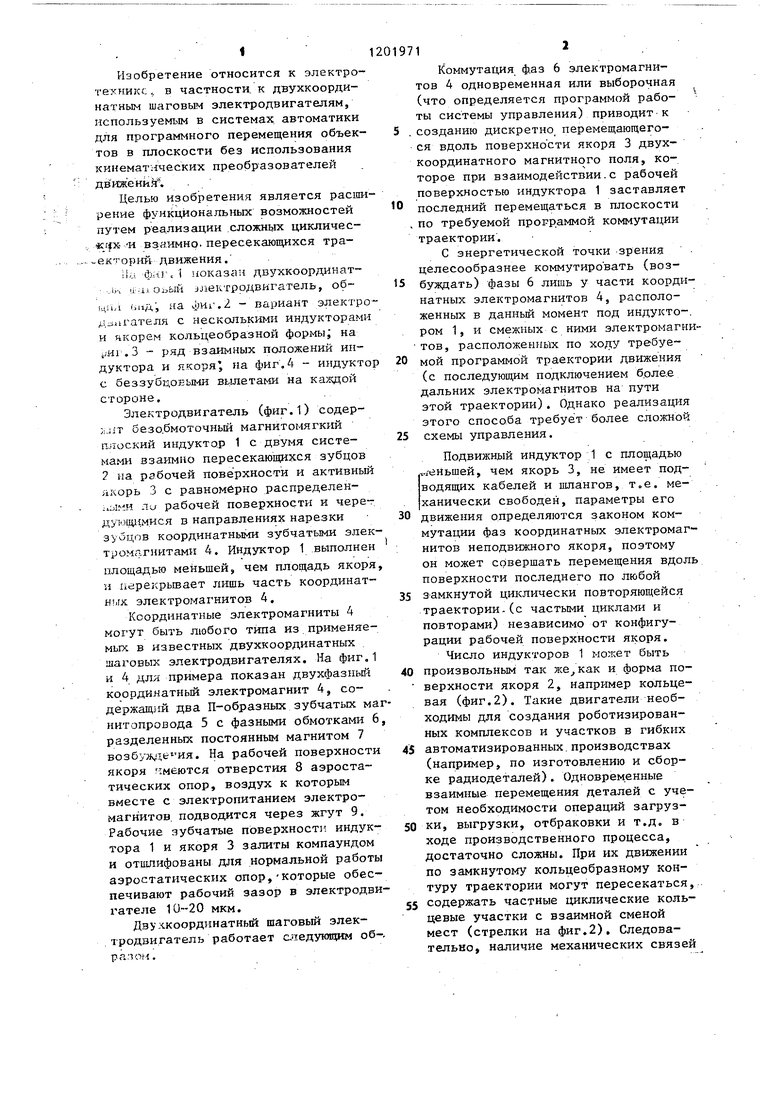
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2030080C1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Двухкоординатный линейный шаговый двигатель | 1976 |
|
SU604094A1 |
| Плоский двухкоординатный двигатель | 1981 |
|
SU1096739A1 |
Изобретение относится к двyk:координатным шаговым электродвигателям, используемым в системах автоматики для программного перемещения объектов в плоскости-. Подвижный индуктор с двумя системами взаимно пересекающихся зубцов и- площадью, меньшей чем площадь, якоря с двумя соответствующими системами -электромагнитов., не имеет подводящих кабелей и шлангов, т.е. механически свободен. Парамет ры движения индуктора опр1еделяются законом ка ммутации фаз электромагнитов якоря, поэтому он может совершать перемещения вдоль поверхности якоря по любой замкнутой циклически повторяющейся траектории. Сторона рабочей . поверхности индуктора по каждой (Л ,координате кратна сумме двух сторон рабочей позерхности электромагнита и двух промежутков между электромагнитами, что уменьшает колебания .тягового усилия, кроме основного индук-. тора имеется по крайней мере еще один аналогичный емуиндуктор-. 1 з.п. ф-лы, 4 .ил;. . ф ч
i
иг.г
| Луценко В..Е., Рубцов В.П | |||
| Электропривод с шаговыми двигателя ш | |||
| Итоги, науки и техники | |||
| €ер | |||
| .Электропривод и | |||
| автоматизация промышленуых установок ВИНИТИ | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
