Изобретение относится к области радиолокации и может быть использовано для дополнительного отсева ложной информации при фиксированной вероятности потери полезной, причем как на этапе первичной обработки радиолокационных сигналов, так и на этапе трассовой обработки для селекции трасс движущихся воздушных объектов (ВО).
Известный способ использования обнаружителей радиолокационных сигналов [см. "Теоретические основы радиолокации", под редакцией Я Д. Ширмана, М., "Сов. радио", 1970 г., стр.157], заключающийся в том, что после детектирования аналоговые эхо-сигналы поступают для последующей обработки, в которой накапливают эхо-сигналы радиолокационной пачки каждого ВО и формируют результирующее значение, которое затем сравнивают с некоторой величиной назначаемого порога, при превышении которого констатируют обнаружение ВО.
Известно устройство осуществления указанного выше способа [см. "Справочник по радиолокации", М. Сколник, М., "Сов. радио", 1976 г., том 1, стр.194 и 195], содержащее последовательно соединенные высокочастотную часть приемника РЛС, детектор, аналого-цифровой преобразователь (АЦП), входное запоминающее устройство (ЗУ), блок выдачи и выход устройства с индикатором на выходе, а также регистр порога, связанный с компаратором выход превышения порога которого связан со входом разрешения выдачи блока выдачи.
Недостатком известных способа и устройства является то, что они в основных случаях, когда случайная величина Х в отношении правдоподобия характеризуется райсовским или релеевским распределением, не обеспечивают строгую реализацию критерия отношения правдоподобия, т.к. накопление эхо-сигналов осуществляют простейшим суммированием, обусловленным недостаточным быстродействием используемых для этого ЭВМ.
Наиболее близким по технической сущности к заявленному способу является способ [см. "Справочник по радиолокации", М. Сколник, М., "Сов. радио 1976 г., том 1, стр.183-194], заключающийся в том, что после детектирования аналоговые эхо-сигналы преобразуют в цифровую форму с помощью АЦП и регистрируют во входном ЗУ для последующей первичной обработки, в т. ч. обнаружения ВО посредством получения величины результирующего сигнала путем накопления эхо-сигналов радиолокационной пачки от каждого ВО и последующего сравнения результирующего сигнала с величиной порога, которую назначают в зависимости от конкретной шумовой и помеховой ситуации в процессе работы, причем при превышении порога констатируют обнаружение ВО и отображают ВО на индикаторах индивидуального и коллективного пользования.
Известно также устройство, наиболее близкое по технической сущности заявленному устройству [см. "Справочник по радиолокации", М. Сколник, М., "Сов. радио", 1976 г., том 1, стр.191], содержащее последовательно соединенные высокочастотную часть приемника РЛС, детектор, АЦП, входное ЗУ со счетчиками адреса записи и чтения, блок выдачи и выход устройства с индикатором на выходе, а также блок формирования азимута, вход которого связан с антенным сельсином, а выход которого связан со вторым входом блока выдачи и, кроме того, пульт оператора и регистр порога, вход которого связан с первым выходом пульта оператора, а выход которого связан с первым входом компаратора, выход превышения порога которого связан со входом разрешения блока выдачи.
Целью изобретения является повышение эффективности отсева ложной первичной радиолокационной информации, а также отсева ложной трассовой информации о движущихся воздушных объектах за счет строгой реализации критерия отношения правдоподобия путем использования, с одной стороны, вычислителя с достаточным быстродействием, а с другой - путем априорной регистрации до начала обработки радиолокационной информации таблицы соответствия величины единичного эхо-сигнала и функции отношения правдоподобия для него.
Поставленная цель достигается тем, что способ селекции полезной информации в обнаружителях радиолокационных эхо-сигналов, заключающийся в том, что в обнаружителях после детектирования аналоговые эхо-сигналы преобразуют в цифровую форму с помощью АЦП и регистрируют во входном ЗУ для последующей первичной обработки, в т. ч. обнаружения воздушных объектов посредством получения величины результирующего сигнала путем накопления эхо-сигналов радиолокационной пачки от каждого воздушного объекта и последующего сравнения результирующего сигнала с величиной порога, которую назначают в зависимости от конкретной шумовой и помеховой ситуации в процессе работы, причем, если величина результирующего сигнала не превышает величину порога, то принимается решение, что анализируемая пачка радиолокационных сигналов является ложной, а если превышает - принимается решение об обнаружении воздушного объекта, который отображают на индикаторах индивидуального и коллективного пользования, причем априорно до начала обработки этой информации регистрируют с помощью устройства ввода в перепрограммируемое постоянное ЗУ (ППЗУ) соответствия известную функцию отношения правдоподобия для единичного эхо-сигнала в виде таблицы соответствия эхо-сигнала и значения самой функции, а затем в процессе обработки информации для каждого единичного эхо-сигнала, выбираемого из входного ЗУ, определяют значения функции отношения правдоподобия, которые регистрируют в ЗУ значений отношения правдоподобия и получают, таким образом, все составляющие значения функции отношения правдоподобия для каждой радиолокационной пачки, далее с помощью вычислителя для всех этих значений функции отношения правдоподобия для каждой радиолокационной пачки определяют произведение значений функции отношения правдоподобия и извлекают из этого произведения арифметический корень степени, равной количеству единичных эхо-сигналов в данной радиолокационной пачке и получают, таким образом, среднее геометрическое значение функции отношения правдоподобия, которое затем используют в качестве адреса обращения к ППЗУ соответствия и считывают из этого ППЗУ наибольшую из двух возможных величину, эквивалентную радиолокационной пачке эхо-сигналов в качестве первого операнда в вычислитель, в качестве второго операнда, в который аналогично считывают из того же ППЗУ величину эхо-сигналов, когда в качестве адреса обращения к ППЗУ соответствия используют вместо среднего геометрического значения функции отношения правдоподобия - максимальное, далее в вычислителе для указанных двух операндов определяют абсолютную разницу, которую далее используют в качестве величины результирующего сигнала радиолокационной пачки для сравнения с величиной порога.
При этом указанный способ реализуется через устройство селекции полезной информации в обнаружителях радиолокационных сигналов, содержащее последовательно соединенные выход высокочастотной части приемника РЛС, детектор, аналого-цифровой преобразователь (АЦП), входное запоминающее устройство (ЗУ) со счетчиками адреса записи (СчАЗ) и чтения (СчАЧ), блок выдачи и выход устройства с индикатором на выходе, а также блок формирования азимута, вход которого связан с антенным сельсином, а выход которого связан со вторым входом блока выдачи и, кроме того, - пульт оператора и регистр порога, вход которого связан с первым выходом пульта оператора, а выход которого связан с первым входом компаратора, выход превышения порога которого связан со входом разрешения выдачи блока выдачи, при этом устройство также содержит блок ввода таблицы соответствия априорно известного отношения правдоподобия для единичного сигнала (ППЗУ), вычислитель, ЗУ значений отношения правдоподобия, первый и второй счетчики адреса (СчА) и блок управления, причем группа выходов входного ЗУ соединена с первой группой входов первого СчА, группа выходов которого соединена с первой группой входов ППЗУ соответствия, группа выходов которого соединена поразрядно с первой группой входов и группой выходов ЗУ значений отношения правдоподобия и с группой входов вычислителя, группа выходов которого поразрядно соединена со вторым входом компаратора, со второй группой входов первого СчА и группой входов второго СчА, управляющий вход и группа выходов блока ввода таблицы соответствия соединены соответственно с выходом пульта оператора и со второй группой входов ППЗУ соответствия, группа выходов второго СчА соединена со второй группой входов ЗУ значений отношения правдоподобия.
Более подробно сущность данного изобретения состоит в следующем. Отношение правдоподобия статистически независимых образцов выборки имеет вид
λ=[p(xi=1)/q(xi=1)][p(xi=2)/q(xi=2)]...[p(xi=m)/q(xi=m)],
где p(xi) и q(xi) - априорно известные плотности вероятности случайной величины Х соответственно для мешающих сигналов и смеси полезных и мешающих сигналов; х - образец выборки, информация которого поступает на вход обнаружителя; i - порядковый номер образца выборки; m - объем выборки.
Отношение правдоподобия. можно характеризовать в m-мерном пространстве фиксированными уровнями
pf(x1)f(x2)...f(xm),
где f(xi)=p(xi)/q(xi)=f(x)
Пусть f(x) характеризуется одним экстремумом на прямой Х и x≥0. В данном случае экстремума не имеет значения. Поэтому будем полагать экстремум максимумом.
Вероятность отсева ложной информации
где
Zm - область интегрирования в m-мерном пространстве.
Вероятность потери полезной информации
где
В задачах, связанных с обнаружением сигналов, для сравнения с порогом используется величина Z. Она равна или  хотя в некоторых случаях такое равенство является приближенным и тогда обнаружитель не является в строгом смысле обнаружителем по критерию отношения правдоподобия [см. "Справочник по радиолокации", М. Сколник, М., "Сов. радио", 1976 г., том 1, стр.183, 190].
хотя в некоторых случаях такое равенство является приближенным и тогда обнаружитель не является в строгом смысле обнаружителем по критерию отношения правдоподобия [см. "Справочник по радиолокации", М. Сколник, М., "Сов. радио", 1976 г., том 1, стр.183, 190].
Когда отношение λ характеризуется классом экспоненциальных функций (f(x) = fэ(x)) величина Z строго равна  a когда - нормальных (гауссовых) функций (f(x)= fH(x)), то Z строго равна
a когда - нормальных (гауссовых) функций (f(x)= fH(x)), то Z строго равна  Оценим условия строгого выполнения этих равенств.
Оценим условия строгого выполнения этих равенств.
В случае m= 2 и f(x) = fэ(x) уровень p = fэ(x1)fэ(x2). Точки с координатами х1 и х2 каждого уровня на плоскости X1, X2 составляют прямые линии под углом π/4 к координатным осям. Такими же линиями можно представить на плоскости X1, Х2 фиксированные значения Z=x1+x2.
Когда f(x)=fн(x) и m=2, точки уровня p=fн(x1)fн(x2) на плоскости X1, X2 будут составлять дуги окружностей с центром в начале координат. Эти дуги на той же плоскости совпадают с соответствующими дугами, которые характеризуют фиксированные значения Z=x1 2+x2 2.
В результате в рассмотренных случаях каждое значение Z соответствует только тем точкам с координатами x1, x2, для которых ρ одни и те же. Кроме того, максимальное значение ρ соответствует точке начала координат.
В случае, когда отношение λ характеризуется классом райсовских функций (f(x)= fp(x)), нельзя подобрать совпадающую с уровнем ρ область Z, образованную как  где n>0. Это определяется тем, что при m=2 на плоскости X1, X2 точки уровня ρ составляют овальные (замкнутые) линии. Поэтому нужен другой способ формирования области Z, который бы обеспечивал совпадение границ этой области с границами зоны фиксированного уровня ρ.
где n>0. Это определяется тем, что при m=2 на плоскости X1, X2 точки уровня ρ составляют овальные (замкнутые) линии. Поэтому нужен другой способ формирования области Z, который бы обеспечивал совпадение границ этой области с границами зоны фиксированного уровня ρ.
Пусть  Полагая
Полагая  получим что
получим что
где в (1) правая часть равенства - арифметический корень m-ой степени от подкоренного выражения; f(x)(0; Zоп - область, сформированная строго по отношению правдоподобия; хm - величина параметра, которая реализует максимальное значение функции f(x). Из (1) определяется величина  Тогда одно и то же значение Zоп будет одинаковым для всех точек (с координатами x1,x2,-.. . , xm) с одним и тем же ρ. Равенство (2) обеспечивает выполнение условия, когда в каждой точки области Zоп значение ρ больше, чем в любой точке вне этой области. В результате обеспечивается наибольшая (по критерию отношения правдоподобия) вероятность отсева ложной информации при фиксированной вероятности потери полезной. Проверим это на примере.
Тогда одно и то же значение Zоп будет одинаковым для всех точек (с координатами x1,x2,-.. . , xm) с одним и тем же ρ. Равенство (2) обеспечивает выполнение условия, когда в каждой точки области Zоп значение ρ больше, чем в любой точке вне этой области. В результате обеспечивается наибольшая (по критерию отношения правдоподобия) вероятность отсева ложной информации при фиксированной вероятности потери полезной. Проверим это на примере.
Пусть p(x)= fp(x), a q(x) - не меняется в области определения - равномерная функции (как и в |6,|), например, в интервале значений x от 0 до 4. Когда f(x)= fp(x) будет не одно, а два значения  Необходимо выбирать или только
Необходимо выбирать или только  или только
или только  nНаиболее целесообразно выбирать
nНаиболее целесообразно выбирать  что позволяет реализовать больший диапазон изменений величины
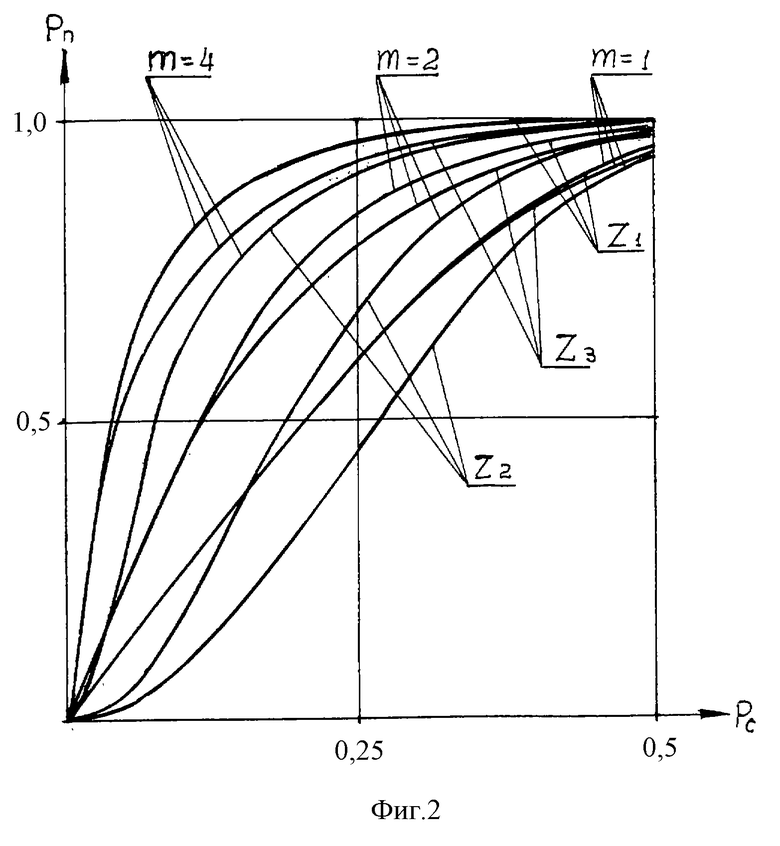
что позволяет реализовать больший диапазон изменений величины  Результаты непосредственного расчета зависимости Рп от Рс для Z1= Zоп,
Результаты непосредственного расчета зависимости Рп от Рс для Z1= Zоп, 
 и m=1, 2 и 4 приведены на фиг.2. Из него следует, что наибольшая вероятность Рп при фиксированной вероятности Рс обеспечивается, когда Z=Zоп. Так при m=2 и Рc=0,25 значение Рп≈0,88 для Z=Zоп и 0,80 для Z= (x1-xm)2+(x2-Xm)2. Если m= 4, то вероятность Рп≈0,97 и 0,94 соответственно для Z=Zоп и Z=Z3.
и m=1, 2 и 4 приведены на фиг.2. Из него следует, что наибольшая вероятность Рп при фиксированной вероятности Рс обеспечивается, когда Z=Zоп. Так при m=2 и Рc=0,25 значение Рп≈0,88 для Z=Zоп и 0,80 для Z= (x1-xm)2+(x2-Xm)2. Если m= 4, то вероятность Рп≈0,97 и 0,94 соответственно для Z=Zоп и Z=Z3.
Техническим результатом изобретения является повышение эффективности отсева ложной информации. В результате проведенных автором исследований получено, что применение способа и устройства заявленного изобретения позволяет повысить отсев ложной информации и при относительно больших значениях порога оставшаяся часть ложной информации уменьшается примерно в два раза.
На фиг. 1 представлена блок-схема устройства, реализующего способ селекции полезной информации в обнаружителях радиолокационных сигналов.
Устройство содержит высокочастотную часть 1 приемника РЛС с антенной 1.1, детектор 2, АЦП 3, входные ЗУ 4 со счетчиками 5 и 6 адреса записи и чтения соответственно, антенный сельсин 7, блок 8 формирования азимута, блок 9 выдачи, индикатор 10, пульт 11 оператора, регистр 12 порога, компаратор 13, устройство 14 ввода, перепрограммируемое постоянное ЗУ (ППЗУ) 15, вычислитель 16, ЗУ 17 значений отношения правдоподобия, первый 18 и второй 19 счетчики адреса (СчА), блок 20 управления и выход 21 устройства.
При этом элементы 1, 2, 3, 4, 9 и 21 соединены последовательно друг с другом в указанном порядке от антенного входа 1.1 до выхода 21 устройства. Первый выход пульт 11 оператора связан со входом регистра 12 порога, выход которого связан с первым входом компаратора 13, выход превышения порога которого связан со входом разрешения. Группа выходов входного ЗУ 4 соединена с первой группой входов первого СчА 18, группа выходов которого соединена с первой группой входов ППЗУ 15 соответствия, группа выходов которого соединена поразрядно с первой группой входов и группой выходов ЗУ 17 значений отношения правдоподобия и с группой входов вычислителя 16, группа выходов которого поразрядно соединена со вторым входом компаратора 13, со второй группой входов первого СчА 18 и группой входов второго СчА 19, группа выходов которого соединена со второй группой входов ЗУ 17, управляющий вход и группа выходов устройства 14 ввода (таблицы соответствия) соединены соответственно со вторым выходом пульта 11 оператора и со второй группой входов ППЗУ 15 соответствия. С выходом 21 связан индикатор 10, например, кругового обзора для индивидуального пользования оператора. Счетчики записи 5 и чтения 6 соединены соответственно со вторым и третьим входами входного ЗУ 4. Антенный сельсин 7 механически связан с антенной 1.1, а блок 8 формирования азимута связан со вторым входом блока 9 выдачи. Выходы блока 20 управления соединены пунктиром (в связи с несущественностью) с вычислителем 16, АЦП 3, счетчиками 5, 6, 18, 19 входным ЗУ 4, ППЗУ 15, блоком 9 выдачи, индикатором 10, ЗУ 17, регистром 12 порога и компаратором 13. Также пунктиром показана механическая связь антенного сельсина 7 с самой антенной 1.1.
На фиг.2 представлены зависимости Р от Р.
Возможность осуществления способа рассмотрим через описание работы устройства.
Устройство работает следующим образом.
Перед началом работы, точнее заблаговременно, вне режима работы, с помощью устройства 14 ввода (специальный программатор, например, ультрафиолетовой многоразовой перезаписи или одноразовой записи способом прожига - в зависимости от используемого типа ППЗУ 15 и в соответствии с тактическими особенностями применения устройства) при наличии разрешающего сигнала с пульта 11 с его второго выхода осуществляют запись в ППЗУ 15 соответствия известную функцию отношения правдоподобия для единичного эхо-сигнала.
В соответствии с инструкцией оператора перед работой он с помощью пульта 11 записывает в регистр 12 значение порога, соответствующее конкретной на момент работы помеховой и шумовой ситуации конкретного региона. Порог может изменяться непосредственно в процессе работы.
В процессе работы отраженные от ВО эхо-сигналы, принимают через антенну 1.1 и усиливают в высокочастотной части 1 приемника РЛС, а затем с помощью детектора 2 детектируют (выделяют огибающую) и преобразуют с помощью АЦП 3 в цифровую форму. Вся дальнейшая цифровая обработка осуществляется при жесткой тактировке с помощью блока 20 управления. При этом полученные пачки эхо-сигналов для каждого ВО с помощью СчАЗ 5 записывают во входное ЗУ 4, устроенное, например, по кольцевому принципу адресации и имеющее емкость, превышающую необходимую для максимально возможного обнаружения ВО, а с помощью СчАЧ 6 читают из ЗУ4 (также последовательно по кольцу адресации, но с некоторым запаздыванием относительно адресации СчАЗ 5) поочередно конкретные значения эхо-сигналов и записывают их на первый СчА 18 в качестве адреса обращения к ППЗУ 15 соответствия и считывают из последнего значения функции отношения правдоподобия, которые регистрируют в ЗУ 17, получая, таким образом, все значения для каждой пачки эхо-сигналов каждого ВО. Затем с помощью вычислителя 16 рассчитывают среднее геометрическое значение функции отношения правдоподобия для каждой пачки эхо-сигналов, выбирая из ЗУ 17 значения эхо-сигналов данной пачки с помощью СчА 19, а затем, используя полученное в вычислителе 16 среднее геометрическое значение функции отношения правдоподобия в качестве адреса обращения к ППЗУ 15, с помощью первого СчА 18 считывают из ППЗУ 15 в вычислитель 16 величину, эквивалентную радиолокационной пачке эхо-сигналов в качестве первого операнда. Далее из ППЗУ 15 считывают в вычислитель 16 с помощью того же первого СчА 18 второй операнд, используя в качестве адреса СчА 18 вместо среднего геометрического значения функции отношения правдоподобия - максимальное, рассчитанное в вычислителе 16. В вычислителе 16 определяют абсолютную разницу для указанных двух операндов, которая поступает на второй вход компаратора 13 в качестве результирующего сигнала радиолокационной пачки для сравнения с величиной порога поступающей через первый вход компаратора 13 от регистра 12 порога. Причем, если величина результирующего сигнала не превышает величину порога, то принимается решение, что анализируемая пачка радиолокационных эхо-сигналов для данного предполагаемого ВО является ложной. Этот ВО не отображают на индикаторе 10 и не выдают на выход 21 устройства для дальнейшей трассовой обработки. В противном случае при превышении порога принимают решение об обнаружении ВО, которое отображают на индикаторе 10 и выдают на выход 21 устройства для дальнейшей трассовой обработки.
Аналогично по другим пачкам эхо-сигналов обнаруживают другие ВО на данном обзоре РЛС. На очередных обзорах РЛС аналогично обрабатывают новые пачки эхо-сигналов каждого ВО, подтверждая или опровергая правильность их обнаружения.
Источник информации
Патент 2099740 РФ за 1997 г., Бюл. 35.
Способ селекции полезной информации в обнаружителях радиолокационных сигналов, заключающийся в том, что в обнаружителях после детектирования аналоговые эхо-сигналы преобразуют в цифровую форму с помощью аналого-цифрового преобразователя (АЦП) и регистрируют во входном запоминающем устройстве (ЗУ) для последующей первичной обработки и обнаружения воздушных объектов посредством получения величины результирующего сигнала путем накопления эхо-сигналов радиолокационной пачки от каждого воздушного объекта и последующего сравнения результирующего сигнала с величиной порога, которую назначают в зависимости от конкретной шумовой и помеховой ситуации в процессе работы, причем, если величина результирующего сигнала не превышает величину порога, то принимается решение, что анализируемая пачка радиолокационных сигналов является ложной, а если превышает - принимается решение об обнаружении воздушного объекта, который отображают на индикаторах индивидуального и коллективного пользования, при этом априорно до начала обработки этой информации регистрируют с помощью устройства ввода в перепрограммируемое постоянное ЗУ (ППЗУ) соответствия известную функцию отношения правдоподобия для единичного эхо-сигнала в виде таблицы соответствия эхо-сигнала и значения самой функции, а затем в процессе обработки информации для каждого единичного эхо-сигнала, выбираемого из входного ЗУ, определяют значения функции отношения правдоподобия, которые регистрируют в ЗУ значений отношения правдоподобия и получают, таким образом, все значения функции отношения правдоподобия для каждой радиолокационной пачки, далее с помощью вычислителя для всех этих значений функции отношения правдоподобия для каждой радиолокационной пачки определяют произведение значений функции отношения правдоподобия и извлекают из этого произведения арифметический корень степени, равной количеству единичных эхо-сигналов в данной радиолокационной пачке, и получают, таким образом, среднее геометрическое значение функции отношения правдоподобия, которое затем используют в качестве адреса обращения к ППЗУ соответствия и считывают из этого ППЗУ величину, эквивалентную радиолокационной пачке эхо-сигналов в качестве первого операнда в вычислитель, в качестве второго операнда в который аналогично считывают из того же ППЗУ величину эхо-сигналов, когда в качестве адреса обращения к ППЗУ соответствия используют максимальное, далее в вычислителе для указанных двух операндов определяют абсолютную разницу, которую далее используют в качестве величины результирующего сигнала радиолокационной пачки для сравнения с величиной порога. Достигаемым техническим результатом является отсев ложной информации. 2 ил.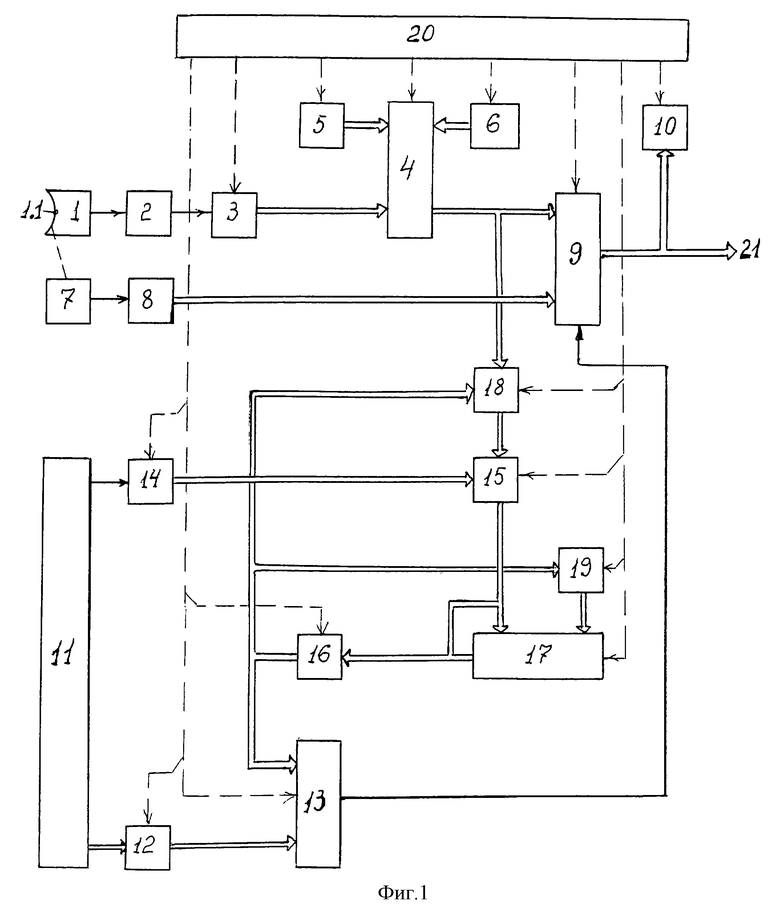
Способ селекции полезной информации в обнаружителях радиолокационных сигналов, заключающийся в том, что в обнаружителях после детектирования аналоговые эхо-сигналы преобразуют в цифровую форму с помощью аналого-цифрового преобразователя (АЦП) и регистрируют во входном запоминающем устройстве (ЗУ) для последующей первичной обработки и обнаружения воздушных объектов посредством получения величины результирующего сигнала путем накопления пачки радиолокационных эхо-сигналов от каждого воздушного объекта и последующего сравнения результирующего сигнала с величиной порога, которую назначают в зависимости от конкретной шумовой и помеховой ситуации в процессе работы, причем, если величина результирующего сигнала не превышает величину порога, то принимается решение, что анализируемая пачка радиолокационных эхо-сигналов является ложной, а если превышает - принимается решение об обнаружении воздушного объекта, отличающийся тем, что априорно до начала первичной обработки регистрируют с помощью устройства ввода в перепрограммируемое постоянное ЗУ (ППЗУ) соответствия известную функцию отношения правдоподобия для единичного радиолокационного эхо-сигнала в виде таблицы соответствия радиолокационного эхо-сигнала и значения самой функции, а затем для каждого единичного радиолокационного эхо-сигнала, выбираемого из входного ЗУ, определяют значения функции отношения правдоподобия, которые регистрируют и получают таким образом все значения функции отношения правдоподобия для всех радиолокационных эхо-сигналов каждой пачки, для всех значений функции отношения правдоподобия для каждой пачки радиолокационных эхо-сигналов определяют произведение значений функции отношения правдоподобия и извлекают из этого произведения арифметический корень степени, равной количеству единичных радиолокационных эхо-сигналов в данной пачке и получают, таким образом, среднее геометрическое значение функции отношения правдоподобия, которое затем используют в качестве адреса обращения к ППЗУ соответствия и считывают из этого ППЗУ наибольшую из двух возможных величину эквивалентную пачке радиолокациоонных эхо-сигналов, аналогично считывают из того же ППЗУ величину радиолокационного эхо-сигнала, когда в качестве адреса обращения к ППЗУ соответствия используют максимальное значение функции отношения правдоподобия, далее для двух указанных велечин определяют абсолютную разницу, которую используют в качестве величины результирующего сигнала радиолокационной пачки для сравнения с величиной порога.
| СКОЛНИК М | |||
| Справочник по радиолокации | |||
| - М.: Сов | |||
| радио, 1976, т.1, с.183-194 | |||
| СПОСОБ СЕЛЕКЦИИ ИНФОРМАЦИИ О ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТАХ С ОБЕСПЕЧЕНИЕМ ОТСЕВА ЛОЖНОЙ ТРАССОВОЙ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099740C1 |
| RU 94027676 A1, 27.05.1996 | |||
| WO 9847021, 22.10.1998 | |||
| DE 19842176, 16.03.2000 | |||
| US 6087972, 11.07.2000. | |||

