Способ селекции информации о движущихся воздушных объектах с обеспечением отсева ложной трассовой радиолокационной информации. Устройство для селекции информации о движущихся воздушных объектах с обеспечением отсева ложной трассовой информации.
Изобретение относится к области радиолокации и может быть использовано для дополнительного отсева ложной трассовой информации в условиях интенсивных отражений от подстилающей поверхности.
Известен способ формирования трассовой информации о движущихся воздушных объектах, состоящий в том, что все эхосигналы, отраженные от воздушных объектов и подстилающей поверхности, вместе с сигналами помех преобразуют в приемном устройстве РЛС из аналоговой формы в цифровую форму и регистрируют в запоминающем устройстве (ЗУ), при этом отождествляют вновь полученные сигналы с сигналами, полученными от конкретных воздушных объектов, путем группового сличения или отбора ближайшей отметки /1/, или осуществляют ветвление, перебор и выбор наиболее правдоподобной совокупности вариантов построения траекторий воздушных объектов /2/. В последнем случае наиболее полно используется информация, содержащаяся в эхо-сигналах.
В указанных выше источниках и в /3/ описаны также устройства формирования трассовой информации, содержащие последовательно соединенные блоки первичной и вторичной обработки радиолокационной информации и блок выдачи трассовой информации потребителю.
Недостатком известных способов и устройств формирования трассовой информации о воздушных объектах является то, что в них не учитывается априорное распределение независимо измеренных по эхо-сигналам величин радиальной скорости (Vр воздушных объектов и подстилающей поверхности на этапе вторичной обработки радиолокационной информации, а применяется лишь режекция мешающих сигналов /4/ на этапе первичной обработки.
Наиболее близким к заявленному способу является способ формирования трассовой информации в бортовых РЛС (БРЛС), в котором осуществляется режекция той части спектра эхо-сигналов, которая соответствует ограниченной области значений радиальной скорости со средним, равным нулю /5/.
Наиболее близким к заявляемому устройству является устройство, содержащее последовательно соединенные: РЛС, блок первичной обработки информации и блок выдачи трассовой информации потребителю /3/.
К недостаткам известных способа и устройства относится следующее.
В них не обеспечивается отсев значительной части эхо-сигналов от подстилающей поверхности, когда в качестве таковой оказывается морская поверхность (в том числе с торосистым ледяным покровом), горная и пересеченная местность. Это объясняется тем, что режектируемая область спектра эхо-сигналов не может быть достаточно большой, т.к. при этом ухудшаются условия обнаружения воздушных объектов. Кроме того, в устройстве не учитывается информация о величинах радиальной скорости, полученных по нескольким независимым радиолокационным измерениям, по которым сформирована конкретная трасса воздушного объекта.
Целью изобретения является повышение эффективности отсева ложной трассовой информации за счет учета различий априорных распределений независимо измеряемых по эхо-сигналам величин радиальных скоростей для воздушных объектов и для отражений от подстилающей поверхности, а также за счет учета информации о величине радиальных скоростей, полученных в нескольких радиолокационных измерениях, по которым сформирована трасса воздушного объекта.
Поставленная цель достигается тем, что в заявленных способе и устройстве в отличие от прототипа дополнительно реализуется отсев ложной информации на этапе ее вторичной обработки с помощью специального блока отсева ложной трассовой информации, в котором формируются списки текущих значений радиальной скорости движения воздушных объектов Vр для каждой j-обнаруженной трассы, определяются суммарные значения  абсолютных величин Vр для каждой j-ой трассы и сравнивают их с пороговым значением, в результате чего осуществляют отсев ложной трассовой информации.
абсолютных величин Vр для каждой j-ой трассы и сравнивают их с пороговым значением, в результате чего осуществляют отсев ложной трассовой информации.
Способ осуществляется тем, что в устройстве селекции движущихся воздушных объектов, содержащее последовательно соединенные: группу БРЛС, каждая со своим блоком первичной обработки радиолокационной информации; блок вторичной обработки радиолокационной информации и блок выдачи трассовой информации потребителю, дополнительно введен блок отсева ложной трассовой информации, содержащий ЗУ списка значений Vр, ЗУ списка соответствия, устройство расчета суммарных значений v
Техническим результатом изобретения является повышение эффективности отсева ложной трассовой информации. В результате проведенных авторами исследований получено, что применение способа и устройства заявленного изобретения позволяет повысить отсев ложной трассовой информации по сравнению с прототипом примерно в 3 раза (при прочих равных условиях).
Более подробно сущность изобретения состоит в следующем.
Отсев ложной трассовой информации на этапе ее вторичной обработки достигается за счет накопления информации о нескольких величинах радиальной скорости Vр для каждой трассы воздушных объектов и последующего принятия решения о том, к какому априорно известному распределению независимых величин Vр относятся значения Vр каждой трассы воздушных объектов к распределению величин Vр для воздушного объекта или к распределению величин Vр для отражений от подстилающей поверхности. Чем больше количество М независимых значений радиальной скорости Vр используется для принятия решения, тем с большой достоверностью решается задача отсева ложных трасс воздушных объектов. Но при этом одновременно увеличивается время запаздывания tз выдачи информации об обнаруженных трассах воздушных объектов потребителю. Это объясняется тем, что сканирование одной и той же области пространства разными БРЛС осуществляется, в общем случае, не одновременно, а последовательно. При существенной величине периода этой последовательности и при значительной величине М время t3 может достигать недопустимо большого значения. Поэтому, как правило, число М должно быть существенно ограничено. Его величина выбирается с учетом допустимого значения времени запаздывания t
Решение об истинности или ложности каждой трассы воздушных объектов принимается в общем случае по данным М значений Vр, полученных по измерениям разных БРЛС, если величины Vр относительно невелики. Это объясняется тем, что одна станция не может обеспечить полностью независимых измерений Vp из-за того, что величина изменения рекурса наблюдения неманеврирующего воздушного объекта (т. е. когда вероятность маневра курсом мала) для конкретной БРЛС в соседних измерениях меняется незначительно.
Рассмотрим предлагаемый способ на примере, когда М 2.
При "завязке" трассы (например, по двум радиолокационным измерениям) для нее рассчитывается величина v
Распределение Pn(Vp) величин Vр для отражений от подстилающей поверхности и Pc(Vp)для реальных ВО можно найти, если принять, что спектр эхо-сигналов от подстилающей поверхности симметричен относительно радиальной скорости Vp0, непрерывен и убывает с увеличением абсолютного значения Vp. На выходе аппаратуры измерения радиальной скорости при достаточно большой мощности эхо-сигнала от подстилающей поверхности в общем случае будет ряд значений Vp, симметричный относительно Vp=0. Центральная часть этого ряда бланкируется в интервале ± v
Значение v
где
σ среднеквадратическое значение случайной величины Vp;
V0 параметр распределения, выбираемый, как и s из условия получения наибольшего значения Pn(Vp) в интервале Vp1 oCVр2 (величина V0 Vp1 -D );
D интервал между соседними значениями Vр.
Функция распределения Vp имеет дискретный (линейный) характер. Интервалы D одинаковы и соответствуют дискретности измерений Vp. Отметим, что сумма вероятностей всех возможных значений Vр равна 1.
Значения Vр для эхо-сигналов от ВО могут изменяться от v
Распределение Pc(Vp) тоже, как и Рn(Vp), имеет дискретный характер с равными интервалами между соседними значениями Vp. Сумма вероятностей возможных значений Vp также равна 1.
По Pn(Vp) и Pc(Vp) нетрудно получить распределения  и
и  где
где  при М 2.
при М 2.
Для разных значений Vпор легко определяется по  и
и  процент отсеянных истинных (Пс) и ложных (Пп) трасс обнаруженных ВО. Например, при Пс 7% величина Пп 90% В то же время в случае М=1 при Пп=90% величина Пс 23% что, естественно, является худшим результатом, чем в случае М 2.
процент отсеянных истинных (Пс) и ложных (Пп) трасс обнаруженных ВО. Например, при Пс 7% величина Пп 90% В то же время в случае М=1 при Пп=90% величина Пс 23% что, естественно, является худшим результатом, чем в случае М 2.
На чертеже представлена структурная схема заявленного устройства.
Устройство содержит: группу БРЛСI, каждая со "своим" блоком первичной обработки радиолокационной информации 2; блок вторичной обработки радиолокационной информации 3; блок отсева ложной трассовой информации 4, содержащий ЗУ измеренных значений радиальной скорости Vp для обнаруженных трасс воздушных объектов 4.1, устройство расчета суммы абсолютных значений Vp 4.2, пороговое устройство 4.3, блок выдачи номера трассы 4.4, блок формирования команд на выдачу информации в ЗУ списка соответствия j, Vp, i (j номер трассы ВО, i номер БРЛС) 4.5, ЗУ списка соответствия j, Vp, i 4.6, блок сравнения номеров БРЛС 4.7, блок формирования отмены команд 4.8; блок выдачи трассовой информации потребителю 5.
Устройство работает следующим образом.
Каждая БРЛС I размещается на своем летательном аппарате и обеспечивает как сканирование определенной зоны пространства, так и измерение пространственных координат обнаруженных воздушных объектов и их радиальной скорости. Зоны сканирования разных БРЛС могут, в общем случае, частично перекрываться. Разные БРЛС обеспечивают, вообще говоря, радиолокационное наблюдение конкретного воздушного пространства под разными ракурсами. Радиолокационная информация каждой БРЛС передается в соответствующий блок первичной обработки радиолокационной информации 2, который осуществляет выделение сигналов на фоне помех и отражений от подстилающей поверхности, а также измерение по обнаруженным сигналам пространственных координат и радиальной скорости ВО. Эта информация передается в блок вторичной обработки радиолокационной информации 3, где реализуется обнаружение, сопровождение и сброс с сопровождения трасс ВО. По обнаруженным трассам ВО полная информация передается в блок выдачи информации потребителю 5, а информация о Vp по обнаруженной j-ой трассе ВО в ЗУ списка значений Vp 4.1. Это ЗУ рассчитывается на хранение в списке для каждой обнаруженной трассы воздушного объекта M значений Vp. Из ЗУ 4.1 при наличии М значений Vp по конкретной трассе ВО информация передается в устройство расчета суммы v
Устройство отсева ложной трассовой информации может быть реализовано с помощью ЭВМ. При этом требуются следующие ее ресурсы:
≈103 коротких операций на каждую трассу ВО;
≈2 Кб памяти ОЗУ /при М=2 или 3/.
Источники информации, принятые во внимание при составлении заявки:
1. С. З.Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации. М. Радио и связь, 1986, стр. 115,116.
2. Э. М.Хазен. Патент N 2032916 на изобретение "Устройство радиолокационного автозахвата и автосопровождения движущихся воздушных объектов" с приоритетом 29 дек. 1992 г.
3. С.З.Кузьмин. Основы теории цифровой обработки радиолокационной информации. М. Сов. радио, 1974, стр. 9.
4. Теоретические основы радиолокации под редакцией Я.Д.Ширмана. М. Сов. радио, 1970, стр. 437-441.
5. Справочник по радиолокации под редакцией М.И.Сколника, т. 3, М. Сов. радио, 1979, стр. 368, 369.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ПОЛЕЗНОЙ ИНФОРМАЦИИ В ОБНАРУЖИТЕЛЯХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210790C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО АВТОЗАХВАТА И АВТОСОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1992 |
|
RU2032916C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ С МАЛОЙ ВЕРОЯТНОСТЬЮ ЗАВЯЗКИ ЛОЖНЫХ ТРАСС | 2014 |
|
RU2586623C2 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1993 |
|
RU2069867C1 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1995 |
|
RU2094816C1 |
| Система обработки радиолокационной информации | 2020 |
|
RU2765564C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ ВОЗДУШНЫХ И НАЗЕМНЫХ ЦЕЛЕЙ В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2329520C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| Устройство и способ уменьшения вероятности завязки ложных трасс и автоматической адаптации вторичного радиолокатора к месту установки | 2022 |
|
RU2796428C1 |
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
Целью изобретения является повышение эффективности отсева ложной трассовой информации за счет учета различий априорных распределений независимо измеренных по эхо-сигналам величин радиальных скоростей воздушных объектов и отражений от подстилающей поверхности, а также за счет накопления и учета информации о величине радиальных скоростей, полученных в нескольких измерениях, по которым сформирована трасса воздушного объекта. Сущность изобретения заключается в том, что в способе и устройстве радиолокационного автозахвата и автосопровождения движущихся воздушных объектов с помощью: БРЛС I, системы первичной обработки радиолокационной информации 2, системы вторичной обработки радиолокационой информации 3 и блока выдачи трассовой информации потребителю 5 - вводится устройство для селекции информации о движущихся воздушных объектах с обеспечением отсева ложной трассовой информации 4. Это устройство состоит из ЗУ списка значений радиальных скоростей для каждой обнаруженной трассы воздушного объекта 4.1, устройства расчета суммы абсолютных значений радиальных скоростей 4.2, порогового устройства 4.3, блока выдачи номера трассы 4.4, блока формирования команд на выдачу информации в ЗУ списка соответствия 4.5, ЗУ списка соответствия 4.6, блока сравнения номеров БРЛС 4.7 и блока отмены команды 4.8. Данное устройство 4 позволяет принимать автоматическое решение о том, к какому априорно известному распределению независимых величин радиальных скоростей относятся значения радиальных скоростей для каждой трассы воздушных объектов - к распределению величин радиальных скоростей для воздушных объектов или к распределению радиальных скоростей для отражений от подстилающей поверхности. В результате обеспечивается отсев ложной трассовой информации. 2 с.п. ф-лы, 1 ил.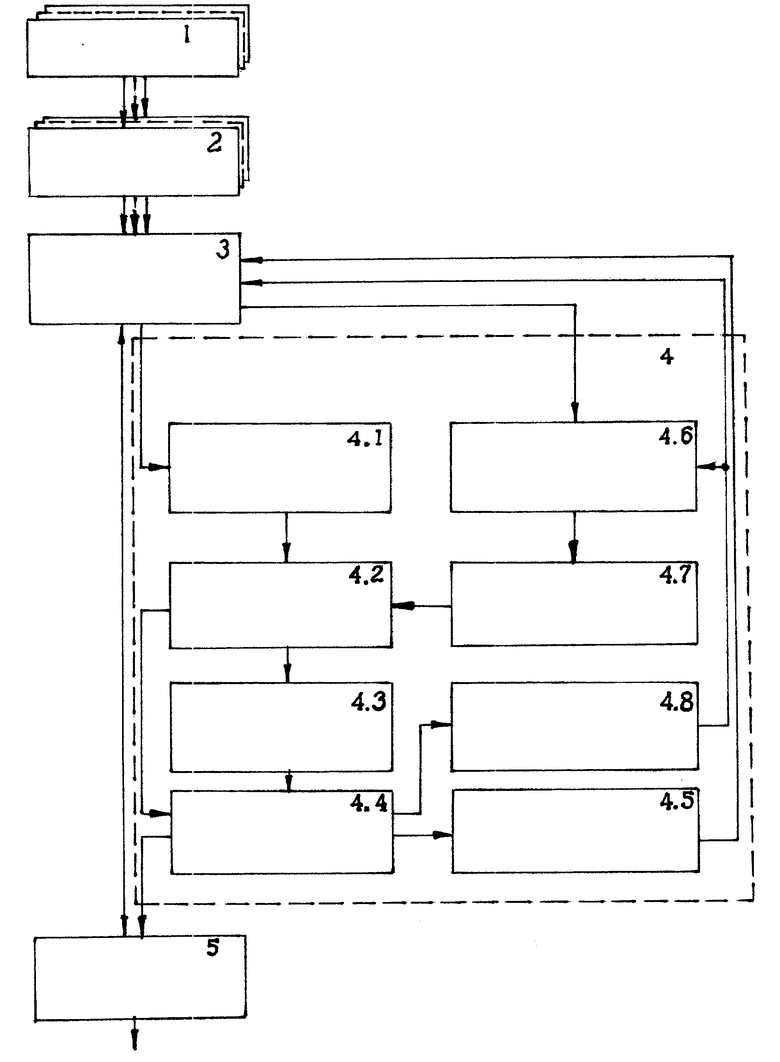
| Справочник по радиолокации /Под ред | |||
| Сколника М.И | |||
| т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Сов.радио, 1979, с | |||
| Полу генеративная топка для сжигания влажного торфа | 1921 |
|
SU368A1 |
| Кузьмин С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| - М.: Сов.радио, 1974, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

