Изобретение касается передачи цифровой информации и может быть использовано для передачи контрольной и управляющей информации (например, по радиоканалу) при оперативном управлении параметрами движения мобильных объектов (локомотивов, большегрузных автосамосвалов) и контроле дистанции между ними.
Цель изобретения - повышение достоверности передачи информации.
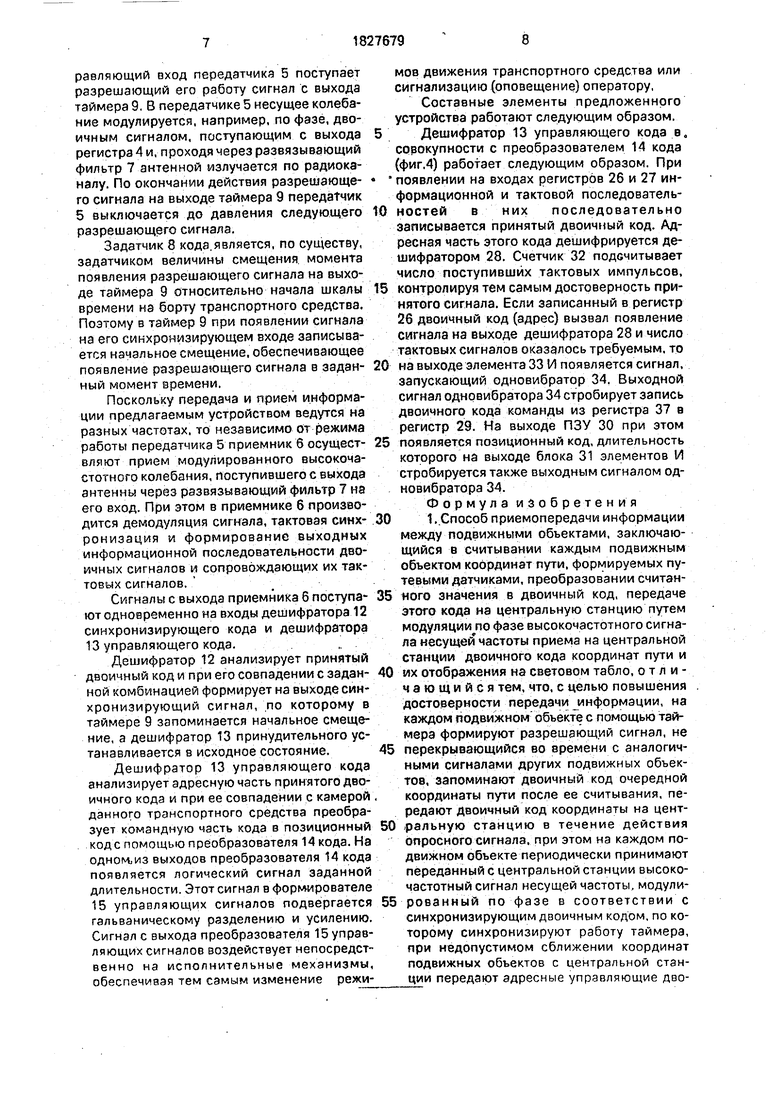
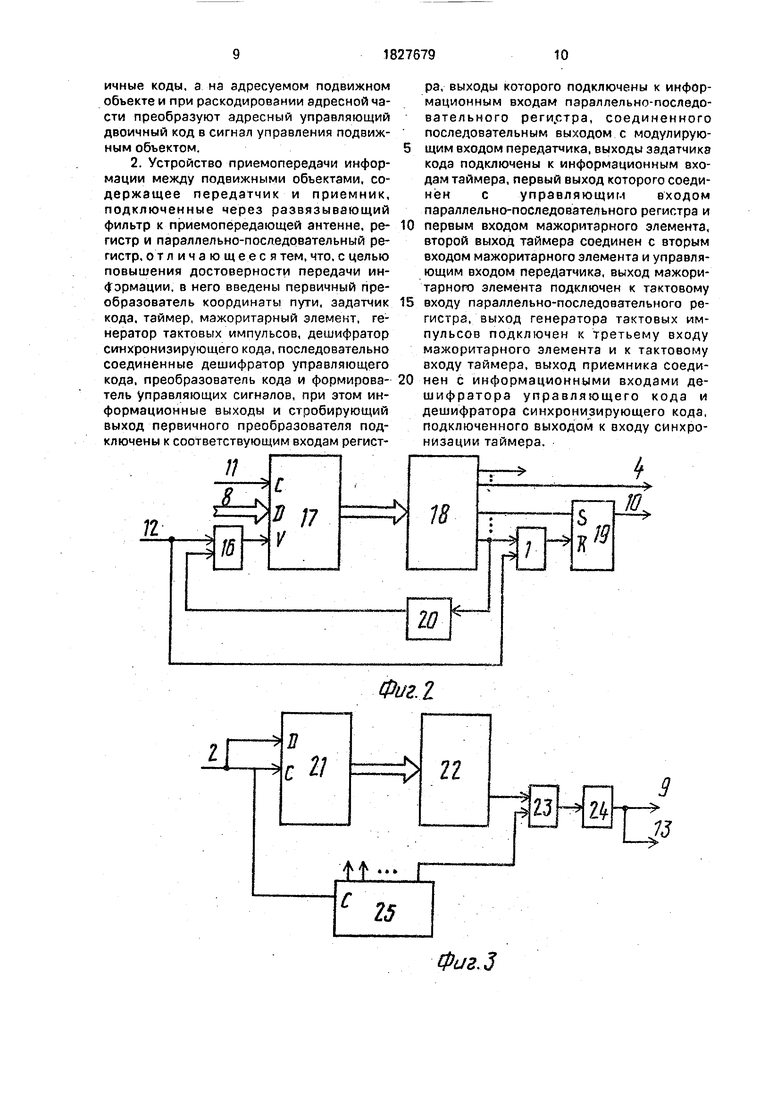
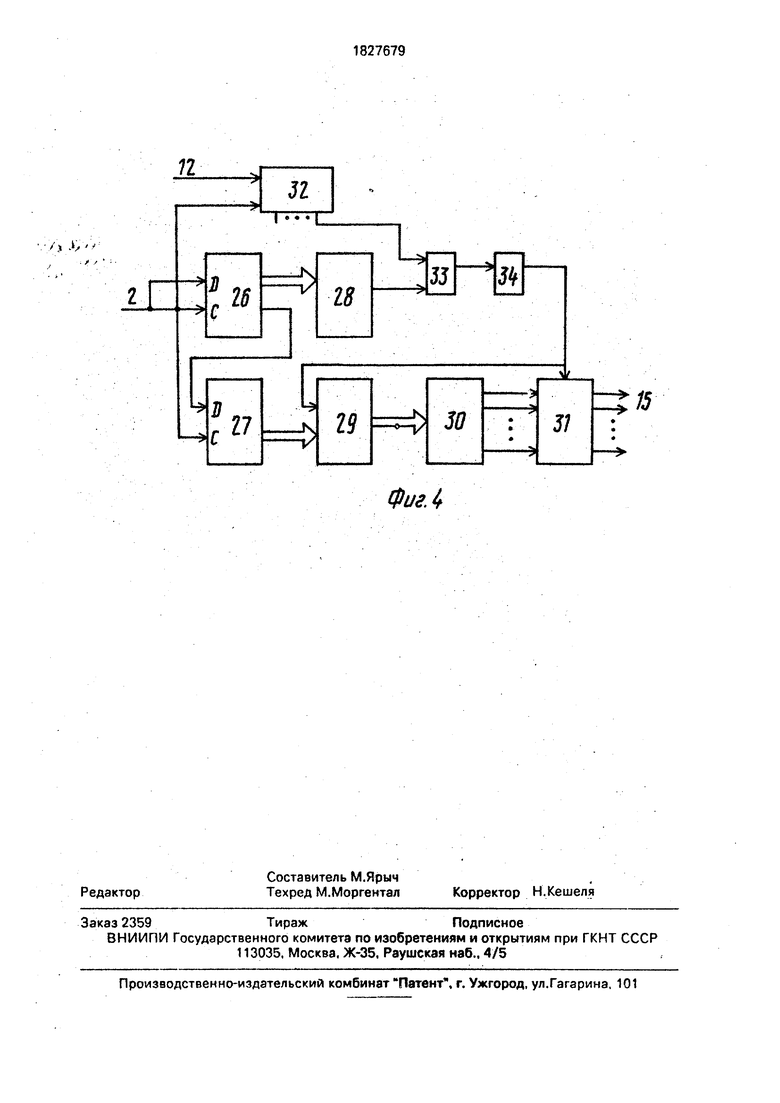
Предлагаемое изобретение поясняется чертежами, где на фиг. 1 представлена функциональная схема устройства для передачи и приема информации телеконтроля и телеуправления подвижными рассредоточенными объектами (устанавливаемого непосредственно на транспортном средстве; на фиг. 2 изображена электрическая функциональная таймера; на фиг.З - электрическая функциональная схема дешифратора синхронизирующего кода; на фиг.4 - электрическая функциональная схема совокупности дешифратора управляющего кода и преобразователя кода.
Устройство для передачи и приема информации содержит путевой датчик 1 (устанавливается на транспортные средства по трассе его движения), первичный преобразователь 2, регистр 3, параллельно-последо- вательный регистр 4, передатчик 5, приемник б, развязывающий фильтр, соединенный с приемопередающей антенной, за- дэтчик 8 кода, таймер 9, мажоритарный элемент 10, генератор 11 тактовых импульсов, дешифратор 12 синхронизирующего кода, дешифратор 13 управляющего кода, дешифратор 13 управляющего кода, преобразователь 14 кода и формирователь 15 управляющих сигналов.
Таймер (фиг.2) содержит элемент ИЛИ б, счетчик 17 с предварительной установкой, дешифратор 18, триггер 19 и одновиб- ратор 20.
Дешифратор синхронизирующего кода (фиг.З) содержит регистр 21, дешифратор 22, элемент И 23, одновибратор 24 и счетчик 25.
Дешифратор управляющего кода и преобразователь кода (фиг.4) содержит регистры 26 и 27, дешифратор 28, параллельный регистр 29, постоянное запоминающее устройство ПЗУ 30, блок 31 элементов И, счетчик 32, элемент И 33 и одновибратор 34.
Предлагаемый способ заключается в следующем.
Вдоль трасс движения транспортных средств в определенном порядке устанавливаются путевые датчики (пикеты), несущие информацию о координате пути. Во
время прохождения транспортным средством путевого датчика координата пути считывается и. при необходимости, преобразуется в двоичный код и запоминается. На каждом транспортном средстве устанавливаются индивидуальные кодовые колодки (заглушки), соответствующие определенному номеру, по.которому может быть идентифицировано транспортное средство
(бортобой номер, тип, участок работы). Центральная станция обеспечивает передачу общего для всех транспортных средств синхронизирующего кода. Этот код устанавливает на каждом транспортном средстве
шкалу времени к начальной отметке. Посредством таймера на каждом транспортном средстве формируется разрешающий сигнал определенной длительности, отстоящий от начальной отметки шкалы времени
на интервал, определяемый кодом индивидуальной заглушки. При появлении разре- шающего сигнала двоичный код .ординаты передается на центральную станцию путем модуляции, например, по
фазе, высокочастотного сигнала несущей. Поскольку появление разрешающего сигнала на отдельно взятом транспортном средстве не перекрывается во времени с аналогичными сигналами других транспортных средств, то это обстоятельство обеспечивает бесконфликтную передачу двоичного кода координаты по каналу связи.
На центральной станции также имеется шкала времени, начальная отметка которой
совпадает с бортовыми шкалами транспортных средств. После установки индивидуальных кодовых заглушек на транспортное средство в программу работы микроЭВМ центральной станции заносятся данные о
том, что в каком из временных интервалов осуществляется передача координат каждого из имеющихся транспортных средств. Это позволяет по временным отметкам идентифицировать транспортное средство
и его координаты.
В процессе приема координат микро- ЭВМ центральной станции производит одновременно и их обработку: усреднение кодов, сравнение кодов координат различных транспортных средств, выдачу результатов обработки на внешнее индикаторное (отображающее) устройство.
При недопустимом сближении координат транспортных средств микроЭВМ формирует управляющие коды, снабженные адресной частью, соответствующей выбранным транспортным средствам и передает их по каналу связи. Среди низких управляющих кодов могут быть как сигналы оповещения водителя (машиниста, оператора)
различного характера, так и команды непосредственного управления, воздействующие на исполнительные механизмы.
Таким образом, предлагаемый способ обеспечивает бесконфликтную передачу ко- дов координат от множества транспортных средств по одному каналу связи за счет временного запоминания кода координаты и разделения во времени моментов передачи кодов координат. Это свидетельствует о достигнутом с помощью предложенного способа повышения достоверности передачи, обусловленной исключением потери сообщения.
ТГценим достигаемую с помощью пред- лягаемого способа оперативность передачи и точность контроля на конкретном примере.
Предположим, что число транспортных средств составляет N 20,число путевых дат- чиков (пикетов) И - 400. скорость передачи двоичных сигналов по каналу связи У 4 кбод, скорость движения транспортного средства - Уде - 30 км/м 500 м/мин 8 м/с.
При М 400 число разрядов двоичного кода координаты составит m 9,
Время передачи одного элемента двоичного кода при V - А кбод., 1Э 256 мкс.
Тогда время передачи двоичного кода координаты составит:
tx -13 m - 2.304 (мс);
Найдем общее время передачи двоичных кодов координат (длительность цикла передачи):
Т - tx N - 2,304 - 20 46,08 (мс);
Следовательно, для выбранных начальных условий среднее время задержки передачи двоичного кода координаты равно Т и составляет 46 мкм.
Определим чистоту передач двоичного кода координат для каждого транспортного средства:
F-1/T-1/0.046 20.
Таким образом, на центральной станции в течение каждой секунды будет получе- на информация о текущей координате транспортного средства не менее 2) раз.
Оценим величину погрешности контроля текущей координаты с учетом Удв и Т.
Удв
1с
0.046 -8 1
0,368 (м) «40(см);
5 10
15
0
5
0
5
0
5
0
5
Таким образом, максимальная погрешность оценки координаты пути не превосходит 40 см, что с большим запасом удовлетворяет требованиям по контролю дистанции между транспортными средствами средняя величина которой, как правило, устанавливается не менее 40 м. (В процентном отношении величина д составляет 0,1%). С ростом допустимой величины дистанции д соответственно будет уменьшаться.
Представленные расчеты являются доказательством достижения поставленной цели повышения оперативности и достоверности передачи информации от большого числа транспортных средств.
Предложенный способ может быть осуществлен с помощью устройства, функциональная схема которого представлена на фиг.1.
Устройство для передачи и приема информации работает следующим образом.
При прохождении транспортным средством путевого датчика первичный преобразователь 2 воспринимает код координаты пути, преобразует его к виду, удобному дли последующего использования (например, преобразует в уровни логических сигналов) и передает в сопровождении стробирующе- го сигнала на соответствующие входы регистра 3. В регис гре 3 запоминается двоичный код координаты и хранится до момента появления другого путевого датчика. Двоичный код координаты с информационных выходов регистра 3 поступает на параллельные входы параллельно-последовательного регистра 4. Появление сигнала на первом управляющем выходе таймера 9 переводит регистр 4 о режим параллельной записи информации, и по тактовому сигналу с выхода генератора 11 тактовых импульсов, проходящему через открытый мажоритарный элемент 10, о регистр 4 записывается двоичный код координаты, хранящейся в регистре 3, По завершении записи кода координаты в регистр 4 на первом управляющем выходе таймера 9 сигнал исчезает и регистр 4 переводится в режим последовательного сдвига двоичного кода.
При появлении сигнала на втором управляющем выходе таймера 9 вновь открывается мажоритарный элемент 10. на выход которого проходят тактовые сигналы с выхода генератора 11 тактовых импульсов. В результате этого код координаты в последовательном виде поступает с последовательного выхода параллельно-последовательного регистра 4 на модулирующий вход передатчика 5. Одновременно на упраеляющий вход передатчика 5 поступает разрешающий его работу сигнал с выхода таймера 9. В передатчике 5 несущее колебание модулируется, например, по фазе, двоичным сигналом, поступающим с выхода регистра 4 и, проходя через развязывающий фильтр 7 антенной излучается по радиоканалу. По окончании действия разрешающего сигнала на выходе таймера 9 передатчик 5 выключается до давления следующего разрешающего сигнала.
Задатчик 8 кода.является, по существу, задатчиком величины смещения момента появления разрешающего сигнала на выходе таймера 9 относительно начала шкалы времени на борту транспортного средства. Поэтому в таймер 9 при появлении сигнала на его синхронизирующем входе записывается начальное смещение, обеспечивающее появление разрешающего сигнала в заданный момент времени.
Поскольку передача и прием информации предлагаемым устройством ведутся на разных частотах, то независимо от режима работы передатчика 5 приемник б осуществляют прием модулированного высокочастотного колебания, поступившего с выхода антенны через развязывающий фильтр 7 на его вход. При этом в приемнике 6 производится демодуляция сигнала, тактовая синхронизация и формирование выходных информационной последовательности двоичных сигналов и сопровождающих их тактовых сигналов.
Сигналы с выхода приемника б поступают одноаременно на входы дешифратора 12 синхронизирующего кода и дешифратора 13 управляющего кода.
Дешифратор 12 анализирует принятый двоичный код и при его совпадении с заданной комбинацией формирует на выходе синхронизирующий сигнал, по которому в таймере 9 запоминается начальное смещение, а дешифратор 13 принудительного устанавливается в исходное состояние.
Дешифратор 13 управляющего кода анализирует адресную часть принятого двоичного кода и при ее совпадении с камерой данного транспортного средства преобразует командную часть кода в позиционный код с помощью преобразователя 14 кода. На одном из выходов преобразователя 14 кода появляется логический сигнал заданной длительности. Этот сигнал в формирователе 15 управляющих сигналов подвергается гальваническому разделению и усилению. Сигнал с выхода преобразователя 15 управляющих сигналов воздействует непосредственно на исполнительные механизмы, обеспечивая тем самым изменение режимов движения транспортного средства или сигнализацию (оповещение) оператору,
Составные элементы предложенного устройства работают следующим образом.
Дешифратор 13 управляющего кода в, совокупности с преобразователем 14 кода (фиг.4) работает следующим образом. При
появлении на входах регистров 26 и 27 информационной и тактовой последовательностей в них последовательно записывается принятый двоичный код. Адресная часть этого кода дешифрируется дешифратором 28. Счетчик 32 подсчитывает число поступивших тактовых импульсов,
контролируя тем самым достоверность принятого сигнала. Если записанный в регистр 26 двоичный код (адрес) вызвал появление сигнала на выходе дешифратора 28 и число тактовых сигналов оказалось требуемым, то
на выходе элемента 33 И появляется сигнал, запускающий одновибратор 34. Выходной сигнал одновибратора 34 стробирует запись двоичного кода команды из регистра 37 в регистр 29. На выходе ПЗУ 30 при этом
появляется позиционный код, длительность которого на выходе блока 31 элементов И стробируется также выходным сигналом одновибратора 34.
Формула изобретения
1. Способ приемопередачи информации между подвижными объектами, заключающийся в считывании каждым подвижным объектом координат пути, формируемых путевыми датчиками, преобразовании считанного значения в двоичный код, передаче этого кода на центральную станцию путем модуляции по фазе высокочастотного сигнала несущей частоты приема на центральной станции двоичного кода координат пути и
их отображения на световом табло, отличающийся тем, что, с целью повышения достоверности передачи информэции, на каждом подвижном объекте с помощью таймера формируют разрешающий сигнал, не
перекрывающийся во времени с аналогичными сигналами других подвижных объектов, запоминают двоичный код очередной координаты пути после ее считывания, передают двоичный код координаты на цент-ральную станцию в течение действия опросного сигнала, при этом на каждом подвижном объекте периодически принимают переданный с центральной станции высокочастотный сигнал несущей частоты, модулированный по фазе в соответствии с синхронизирующим двоичным кодом, по которому синхронизируют работу таймера, при недопустимом сближении координат подвижных объектов с центральной стан- ции передают адресные управляющие двоичные коды, а на адресуемом подвижном объекте и при раскодировании адресной части преобразуют адресный управляющий двоичный код в сигнал управления подвижным объектом.
2. Устройство приемопередачи информации между подвижными объектами, содержащее передатчик и приемник, подключенные через развязывающий фильтр к приемопередающей антенне, регистр и параллельно-последовательный регистр, отличающееся тем, что, с целью повышения достоверности передачи информации, в него введены первичный преобразователь координаты пути, задатчик кода, таймер, мажоритарный элемент, генератор тактовых импульсов, дешифратор синхронизирующего кода, последовательно соединенные дешифратор управляющего кода, преобразователь кода и формирователь управляющих сигналов, при этом информационные выходы и стробирующий выход первичного преобразователя подключены к соответствующим входам регистра, выходы которого подключены к информационным входам параллельно-последовательного регистра, соединенного последовательным выходом с модулирующим входом передатчика, выходы задатчика кода подключены к информационным входам таймера, первый выход которого соединен с управляющим входом параллельно-последовательного регистра и
первым входом мажоритарного элемента, второй выход таймера соединен с вторым входом мажоритарного элемента и управляющим входом передатчика, выход мажоритарного элемента подключен к тактовому
входу параллельно-последовательного регистра, выход генератора тактовых импульсов подключен к третьему входу мажоритарного элемента и к тактовому входу таймера, выход приемника соединен с информационными входами дешифратора управляющего кода и дешифратора синхронизирующего кода, подключенного выходом к входу синхронизации таймера.
Изобретение относится к передаче цифровой информации от транспортных средств. Цель изобретения-повышение достоверности передачи информации. В соответствии с предлагаемым способом на каждом транспортном средстве формируют разрешающий сигнал, не перекрывающийся во времени с аналогичными сигналами других транспортных средств. После считывания двоичного кода координаты пути его запоминают, а передают только во время действия разрешающего сигнала. Устройство для осуществления предлагаемого способа содержит первичный преобразователь 2, регистры 3 и 4, передатчик 5, приемник 6, развязывающий фильтр 7, задатчик 8 кода, таймер 9, мажоритарный элемент 10, генератор 11 тактовых импульсов, дешифратор 12синхронизирующего кода, дешифратор 13управляющего кода, преобразователь 14 кода, формирователь 15 управляющих сигналов, 2 с.п.ф-лы, 4 ил. (Л с 00 Ю XI ч ю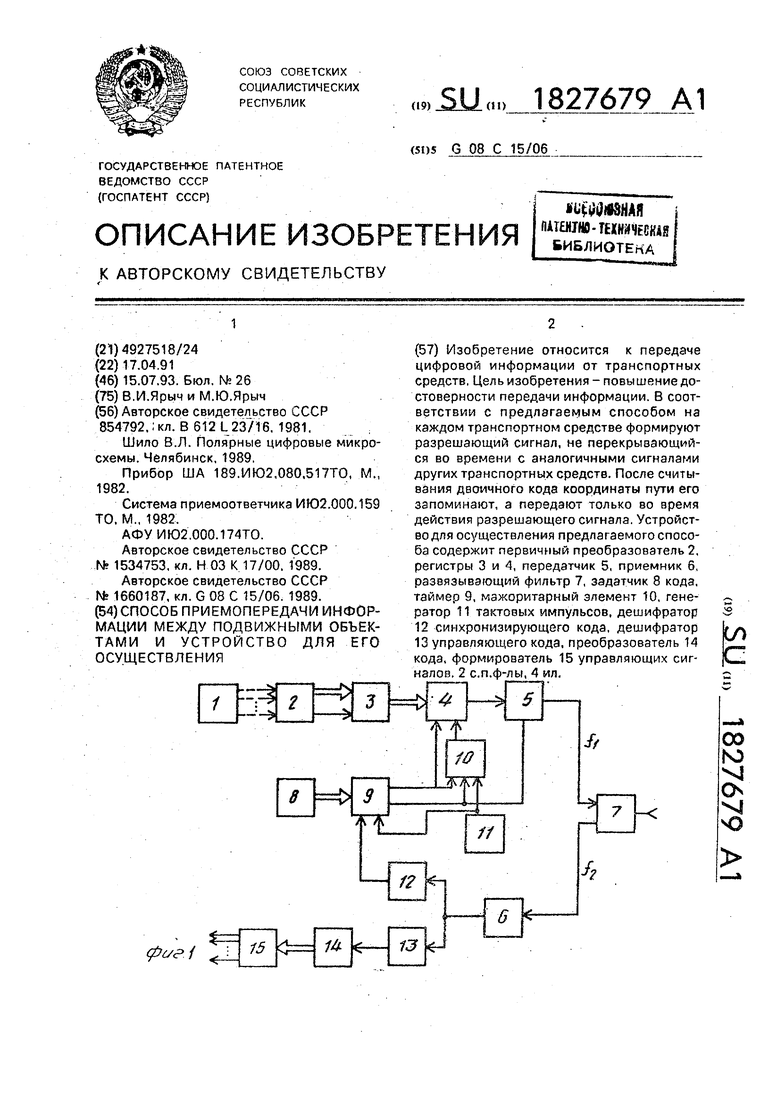
72
Фиг. I
Фиг.З
72
J2
о Л.
2
2В
$
2
1
Z7
Q
25
Л
0м. 4
