Изобретение относится к электроэнергетике и предназначено для автоматизации управления высоковольтными распределительными пунктами угольных шахт. Система может применяться для контроля состояния рассредоточенных объектов и выдачи на них управляющих сигналов.
Известна система телемеханики УТШ мод.2 (см.Проспект, Комплекс устройств телемеханики для угольных шахт УТШ, ЦБНТИ Минуглепрома СССР, 1988, (проспект прилагается), содержащая пункт управления, 8 контролируемых пунктов (КП) и до 32 устройств искробезопасного сопряжения с высоковольтными ячейками УИС. Сбор и передача информации от каждого из УИС осуществляется непрерывно по отдельному многопарному кабелю, что существенно повышает стоимость системы и снижает ее надежность.
Кроме того, элементная база КП в УТШ не позволяет приблизить средства обработки данных к рассредоточенным в пространстве источникам и приемникам информации, что не позволяет использовать сложные алгоритмы управления и обработки информации.
Известна также система дистанционного контроля и управления SENTRIE MINOS (проспект фирмы Huwood Electric Limited (проспект прилагается), которая включает в себя поверхностное и подземные устройства. В состав поверхностного устройства входит микрокомпьютер с программно-управляемым процессором для обработки данных, модем, монитор и клавиатура. Поверхностное устройство соединяется с подземным с помощью телефонного кабеля. В состав подземного устройства входит модем и контроллер, который в случае нарушения связи с поверхностным компьютером продолжает работать в качестве управляющего и выполняет роль поверхностного компьютера. Однако это устройство имеет большие непроизводительные затраты временных вычислительных ресурсов процессора, значительное машинное время, затрачиваемое на непрерывный циклический опрос объектов и анализ их состояния. К недостаткам системы следует отнести также низкую скорость передачи аварийной информации, вызванную циклическим характером переназначения ведущих станций и отсутствием возможности внеочередной передачи данных, что недопустимо для ряда систем управления, работающих в реальном масштабе времени. Кроме того, в известном устройстве из-за отсутствия средств контроля исправности линии связи соединяющей объекты контроля и подземное устройство возможна передача ложной информации, так как при обрыве (коротком замыкании) линии связи в устройстве формируется сигнал датчик отключен (включен).
Цель изобретения повышение быстродействия и достоверности системы.
Достигается это тем, что система контроля и управления высоковольтными ячейками распределительной сети шахты содержит хотя бы две станции управления, каждая из которых содержит модем, асинхронный приемопередатчик, информационный выход которого соединен с соответствующим входом модема, а информационный вход с информационным выходом модема, контроллер, соединенный с асинхронным приемопередатчиком через магистраль контроллера, порт ввода, подключенный к внутрисистемной магистрали контроллера, снабжена хотя бы двумя блоками сопряжения, блоком диагностики, блоком формирования адреса и блоком управления модемом, причем блок управления модемом содержит блок формирования прерывания контроллера, узел формирования вектора прерывания модема, преобразователь параллельного кода в последовательный, подключенные к внутрисистемной магистрали контроллера, блок коммутации, блок формирования ответа на запрос, узел формирования запроса прерывания, элемент памяти, вход запроса канала которого соединен с соответствующим входом преобразователя параллельного кода в последовательный и выходом порта ввода, элемент И, выход которого соединен с управляющим входом элемента памяти, прямой вход соединен с высокочастотным выходом модема, инверсный вход с информационным входом блока коммутации и первым выходом преобразователя параллельного кода в последовательный, выход блока коммутации соединен с модулирующим входом модема, а управляющий вход с управляющим выходом элемента памяти, первый и второй выходы которого соединены с соответствующими входами блока формирования ответа на запрос, третий вход последнего соединен с вторым выходом преобразователя параллельного кода в последовательный, а первый и второй выходы соединены с соответствующими входами узла формирования запроса прерывания модема и узла формирования вектора прерывания модема, третьи входы которых соединены с прямым входом элемента И, четвертые входы с выходом готовности приема асинхронного приемопередатчика, пятые входы с выходом готовности передатчика асинхронного приемопередатчика, выход узла формирования запроса прерывания модема соединен с входом блока формироваия прерывания контроллера, блок формирования адреса содержит последовательно соединенные генератор, узел управления формирования адреса и формирователь адреса, вывод которого соединен с контроллером через шину адреса магистрали связи с объектом и со входом чтения записи контроллера, а вход соединен группой линий с выходом выдачи адреса блока сопряжения контроллера, причем одна из указанных линий соединяется с первым входом прерывания узла управления формирования адреса, второй вход которого соединен с первой линией шины управления магистрали связи с объектом, а выход с контроллером, при этом контроллер через магистраль связи с объектом соединен с первым входом блока сопряжения, второй вход которого соединен со второй линией шины управления магистрали связи с объектами, третий вход соединен с третьей линией шины управления магистрали связи с объектами, четвертый соединен с шиной адреса магистрали связи с объектами, первый вход соединен с шиной данных магистрали связи с объектами, а второй выход соединен с первой линией шины управления магистрали связи с объектами, блок сопряжения содержит первый регистр, вход которого соединен с магистралью связи с объектами и является первым входом блока сопряжения, дешифратор, вход которого соединен с шиной адреса магистрали связи с объектами и является четвертым входом блока сопряжения, три элемента И, первые входы которых соединены с выходом дешифратора, вторые входы первого и второго элемента И соединены соответственно со второй и третьей линиями шины управления магистрали связи с объектом, выход первого элемента И соединен с инверсным входом первого регистра, n выходов последнего подключены к объектам телеуправления и являются управляющими выходами блока сопряжения, коммутатор датчиков, выход которого соединен с шиной данных магистрали связи с объектами, а m информационных входов соединены с объектами телесигнализации и являются информационными входами блока сопряжения, второй регистр, инверсный вход которого соединен с соответствующим входом коммутатора и выходом второго элемента И, m информационных входов соединены с соответствующими входами коммутатора датчиков, блок сравнения, нечетные входы которого соединены с m выходами второго регистра, четные входы с m входами второго регистра, а выход с вторым входом третьего элемента И, блок диагностики содержит элемент И, первый вход которого соединен с третьей линией шины данных магистрали связи с объектами и является первым входом блока диагностики, дешифратор, вход которого соединен с шиной адреса магистрали связи с объектами и является вторым входом блока диагностики, а выход со вторым входом элемента И, коммутатор, управляющий вход которого соединен с выходом дешифратора И с первой линией шины управления магистрали связи с объектами и является первым выходом блока диагностики, выход с шиной данных магистрали связи с объектами и является вторым выходом блока диагностики, блок формирования тестовых сигналов, управляющий вход которого соединен с выходом элемента И, а выходы с сигнальными входами коммутатора.
Сопоставительный анализ с прототипом показывает, что заявляемая система отличается наличием новых блоков: сопряжения, диагностики, управления формирования адресом, управления модемом и их связями с остальными элементами схемы.
Таким образом, заявляемая система соответствует критерию изобретения "новизна".
Сущность изобретения заключаеся в следующем. Надежность и достоверность передачи информации, главным образом, зависит от исправности линии связи, с которой обезличивается признак включен (выключен) датчик и короткое замыкание (обрыв) линии связи. Введение блока диагностики в системе позволяет осуществить непрерывный контроль целостности линии связи.
Кроме того, благодаря введению блоков формирования адреса и сопряжения применен способ аппаратно-программного опроса, позволяющий снизить время реакции системы на изменения состояния датчиков.
Сравнение заявляемой системы с другими техническими решениями показывает, что введение новых блоков в указанной связи с остальными элементами схемы позволяет повысить надежность и достоверность передачи информации. Это позволяет сделать вывод о соответствии технического решения критерию "существенные отличия".
Система контроля и управления высоковольтными ячейками распределительной сети шахты содержит хотя бы две идентичные станции управления. На чертеже (фиг.1, фиг.2) представлена блок-схема одной станции управления.
Станция управления содержит модем 1, асинхронный приемопередатчик 2, информационный выход которого соединен с соответствующим входом модема 1, а информационный вход с информационным выходом модема 1, контроллер 3, соединенный с асинхронным приемопередатчиком 2 через магистраль контроллера 3, порт ввода 4, подключенный к внутрисистемной магистрали контроллера 3, блоки 5, 6 сопряжения, блок 7 диагностики, блок 8 формирования адреса и блок 9 управления модемом, причем блок 9 управления модемом содержит блок 10 формирования прерывания контроллера, узел 11 формирования вектора прерывания модема, преобразователь параллельного кода в последовательный 12, подключенные к внутрисистемной магистрали контроллера, блок 13 коммутации, блок 14 формирования ответа на запрос, узел 15 формирования запроса прерывания, элемент 16 памяти, вход запроса канала которого соединен с соответствующим входом преобразователя параллельного кода в последовательный 12 и выходом порта ввода 4, элемент И 17 выход которого соединен с управляющим входом элемента памяти 16, прямой вход соединен с высокочастотным выходом модема 1, инверсный вход с информационным входом блока 13 коммутации и первым выходом преобразователя параллельного кода в последовательный 12, выход блока 13 коммутации соединен с модулирующим входом модема 1, а управляющий вход с управляющим выходом элемента памяти 16, первый и второй выходы которого соединены с соответствующими входами блока 14 формирования ответа на запрос, третий вход последнего соединен со вторым выходом преобразователя параллельного кода в последовательный 12, а первый и второй выходы соединены с соответствующими входами узла 15 формирования запроса прерывания модема и узла 11 формирования вектора прерывания модема, третьи входы которых соединены с прямым входом элемента И 17, четвертые входы с выходом готовности приема асинхронного приемопередатчика 2, пятые входы с выходом готовности передатчика асинхронного приемопередатчика 2, выход узла 15 формирования запроса прерывания модема соединен со входом блока 10 формирования прерывания контроллера 10, блок 8 формирования адреса содержит последовательно соединенные генератор 18, узел 19 управления формирования адреса и формирователь адреса 20, выход которого соединен с контроллером 3 через шину адреса магистрали связи с объектом и со входом чтения записи контроллера, а вход соединен группой линий с выходом выдачи адреса блока сопряжения контроллера, причем одна из указанных линий соединяется с первым входом прерывания узла 19 управления формирования адреса, второй вход которого соединен с первой линией шины управления магистрали связи с объектом, а выход контроллера 3, при этом контроллер 3 через магистраль связи с объектами соединен с первым входом блока 5(6) сопряжения, второй вход которого соединен с второй линией шины управления магистрали связи с объектами, третий вход соединен с третьей линией шины управления магистрали связи с объектами, четвертый соединен с шиной адреса магистрали связи с объектами, первый выход соединен с шиной данных магистрали связи с объектами, а второй выход соединен с первой линией шины управления магистрали связи с объектами, блок 5(6) сопряжения содержит регистр 21, вход которого соединен с магистралью связи с объектами и является первым входом блока 5(6) сопряжения, дешифратор 22, вход которого соединен с шиной адреса магистрали связи с объектами и является четвертым входом блока 5(6) сопряжения, элементы И 23, 24, 25, первые входы которых соединены с выходом дешифратора 22, вторые входы элементов И 23, 24 соединены соответственно со второй и третьей линией шины управления магистрали связи с объектом, выход элемента И 23 соединен с инверсным входом регистра 21 n-выходов последнего подключен к объектам 26 телеупраления и являются управляющими выходами блока 5 сопряжения, коммутатор 27 датчиков, выход которого соединен с шиной данных магистрали связи с объектами, а m-информационных входов соединены с объектами телесигнализации 28 и являются информационными входами блока 5(6) сопряжения, регистр 29, инверсный вход которого соединен с соответствующим входом коммутатора 27 и выходом элемента И 24, m-информационных входов соединены с соответствующими входами коммутатора 27 датчиков, блок 30 сравнения, нечетные входы которого соединены с m-входами регистра 29, четные входы с m-входами регистра 29, а выход с вторым входом элемента И 25, блок 7 диагностики содержит элемент И 31, первый вход которого соединен с третьей линией шины данных магистрали связи с объектами и является первым входом блока 7 диагностики, дешифратор 32, вход которого соединен с шиной адреса магистрали связи с объектами и является вторым входом блока 7 диагностики, а выход с вторым входом элемента И 31, коммутатор 33, управляющий вход которого соединен с выходом дешифратора 32 и с первой линией шины управления магистрали связи с объектами и является первым выходом блока 7 диагностики, выход с шиной данных магистрали связи с объектами и является выходом блока 7 диагностики, блок 34 формирования тестовых сигналов, управляющий вход которого соединен с выходом элемента И 31, а выходы с сигнальными входами коммутатора 33.
Объектами контроля и управления предлагаемой станции являются источники информации высоковольтные ячейки, которые собираются в индивидуальные блоки 5(6) сопряжения (БС). Алгоритм обслуживания блока 5(6) осуществляется путем передачи с контроллера 3 адресной последовательности. Каждый из блоков 5, 6, подключенный к магистрали связи, сравнивает свой адрес с адресом, поступающим в шину адреса. Адрес блоков 5, 6 формируется в блоке 8 формирования адреса с помощью генератора 18, узла 19 управления формирования адреса и формирователя 20 адресов чисто аппаратным путем при определении состояния блока 5(6) или аппаратно-программно при выдаче команд управления. Темп циклического опроса блоков 5, 6 определяется частотой тактового генератора 18. Выходной сигнал с генератора 18 поступает на счетный вход узла 19 управления формированием адреса, с выхода последнего на формирователь 20 адреса. Формирователь 20 адреса под воздействием регулярной импульсной последовательности, подаваемой на его вход, производит поочередную циклическую смену адресов на шине адреса магистрали связи с объектами управления. В соответствии с этим происходит последовательный поочередный переход в активное состояние выхода дешифратора 22 адреса каждого из блоков 5, 6 сопряжения. Сигнал с выхода дешифратора 22 поступает на управляющие входы элементов И 23, 24, 25 разрешая, таким образом обмен сигналами управления между элементами блока 5(6) сопряжения и шиной управления магистрали связи с объектом. Если сигналы датчиков 28 в этот момент времени совпадают с их сигналами, которые были записаны в регистр 29 ранее, то выход блока 30 сравнения остается в пассивном состоянии, а, следовательно, в пассивном состоянии остается и выход элемента И 25 блока 5 сопряжения и второй вход узла 19 управления формирования адреса, благодаря чему цепь передачи импульсов с выхода генератора 18 на вход формирователя 20 адреса сохраняется. В такой ситуации по истечении времени равного периоду частоты импульсной последовательности, генерируемой генератором 18, формирователь адреса 20 сформирует на шине адреса новый адрес и в активное состояние перейдет очередной выбранный блок сопряжения. В такой последовательности смены состояний контроллер 3 не получает никаких запросов прерывания и пока состояние датчиков 28, точнее их выходных сигналов, остается неизменным, циклический опрос блоков 5, 6 сопряжения выполняется число аппаратным путем без затрат временных ресурсов микропроцессорного контроллера 3.
Рассмотрим теперь ситуацию, возникающую, когда в активное состояние переведен установкой его адрес на шине адреса такой блок 5(6) сопряжения, хотя бы один из датчиков 28, которого изменил свое состояние. Текущие значения сигналов датчиков 28 поданы на четные входы блока 30 сравнения, а те из них, которые существовали до изменения и хранятся в регистре 29 на нечетные входы.
Так как в рассматриваемой ситуации текущие значения сигналов датчиков 28 уже не совпадают с прежними, то выходной сигнал блока 30 теперь находится в активном состоянии. Этот сигнал подается на информационный вход элемента И 25. На другой же управляющий вход этой схемы подается сигнал управления, снимаемый с выхода дешифратора 22, а так как в рассматриваемый момент времени на шине адреса установлен адрес рассматриваемого блока сопряжения, то следовательно, на выходе элемента И 25 появится сигнал. Этот сигнал, являющийся сигналом прерывания, подается на первую линию (прерываний) шины управления (СВ), а оттуда на вход блока 19 управления формирования адресов, приостанавливая их перебор путем разрыва цепи прохождения импульсов от генератора 18 на формирования 20 адресов (счетчик). Блок 19 в ответ на сигнал прерывания, поступивший из одноименной линии шины управления, генерирует сигнал прерывания, который с выхода блока 19 направляется в контроллер 3, вызывая прерывание текущей программы и переход на программу обработки прерываний. В ответ на это прерывание контроллер 3 выполняет операцию чтения данных с одноименной шины (DB). Операция чтения стробируется сигналом чтения, подаваемым в рассматриваемый активный блок сопряжения по третьей линии шины управления СВ. Этим сигналом, поступающим через элемент И 24 на вход управления коммутатора 27 датчиков, вызывается подключение цепей каждого из датчиков 28 к соответствующим линиям шины данных DВ, откуда они попадают на входы соответствующий портов ввода контроллера 3, а из них уже в процессор под управлением соответствующих команд подпрограммы ввода данных. Одновременно сигнал, стробирующий чтение данных, поступает и на вход записи регистра 29, вызывая их обновление. В результате этого сигналы на выходах регистра 29 становятся теми же, что и сигналы соответствующих датчиков 28 (вкл./выкл. высоковольтная ячейка срабатывание блока реле утечки или максимальной токовой защиты, расход электроэнергии и т.д.).
Вследствие этого группа сигналов, подаваемых на четные входы блока 30 сравнения становится такой же, как и группы сигналов, подаваемых на нечетные входы, что сопровождается возвратом в пассивное состояние выхода этого блока и, следовательно, снятием с одноименной линии шины управления сигнала запроса прерывания, иначе говоря переводом в пассивное состояние узла 19 формирователя адреса. В результате этого перевода восстанавливается цепь прохождения импульсов от генератора 18 на вход формирователя 20 адресов, и возобновляется циклический опрос блоков сопряжения, а работа с рассматриваемым блоком заканчивается.
Когда в ходе циклического опроса блоков 5, 6 сопряжения на шине адреса оказывается установленным адрес блока 7 диагностики, запрос прерывания процессору по одноименной линии шины управления подается в обязательном порядке. В ходе обработки этого прерывания контроллер 3 выполняет многократно операции чтения данных по одному и тому же адресу, установленному на шине адреса. Сигнал, стробирующий чтение, многократно поступает на вход блока 34 формирования тестовых сигналов, который содержит в себе распределитель, поочередно возбуждающий каждую из линий шины, подлежащих проверке. Коммутатор 33 осуществляет подключение сгенерированных таким образом сигналов к шине данных. Эти сигналы принимаются контроллером 3 и анализируются им. Так как в ходе выполнения рассматриваемых диагностических операций каждая из проверяемых линий переводится в состояние логической единицы поочередно и в нормальном исправном состоянии в каждом такте диагностики в состоянии логической единицы может пребывать лишь одна из них, то в результате такого диагностирования легко выявляются и обрывы соответствующих цепей и их короткие замыкания на землю и их замыкания между собой. По окончании операций диагностирования контроллер 3 принудительно изменяет адрес, установленный на шине адреса, следствием чего оказывается снятие запроса прерывания с одноименной линии, а после того, как контроллер 3 освободит формирователь 20 адреса возобновление циклического опроса блоков 5, 6, начало нового цикла опроса.
Для выдачи команд управления нужному блоку контроллер 3 не ждет, пока на шине адреса чисто аппаратным путем будет установлен адрес нужного блока, а сигналом с контроллера 3 разрывает цепь прохождения в формирователь 20 адреса импульсов с генератора 18 и тем самым приостанавливая автоматический перебор адресов узлом 19. Вслед за этим контроллер 3 заносит туда адрес нужного ему блока 5(6) сопряжения. Занесение туда адреса выполняется контроллером 3 программно через порт вывода, а затем уже выбранный в блок передается по шине данных DB команда телеуправления (включить или выключить ячейку) и по второй линии шины управления сигнал записи данных. При этом команда ТУ через регистр 21 поступает на объекты телеуправления 26. После ее выдачи путем перевода узла 19 управления формированием адреса в состояние, когда снова создается цепь для прохождения импульсов генератора 18 от узла 19 к формирователю 20 адреса, благодаря чему импульсы от генератора 18 снова начинают поступать на вход узла 19 формирования адреса и возобновляется циклический опрос блоков 5, 6 сопряжения. Таким образом, при таком способе ввода данных в микропроцессорный контроллер он (ввод) выполняется уже не путем регулярного опроса блоков сопряжения с последующим столь же регулярным анализом введенных данных, а по прерываниям, создаваемым соответствующими схемами лишь тех блоков 5, 6 сопряжения, в чьих высоковольтных ячейках произошли изменения состояния объектов контроля. Конечно, такой способ ввода не является препятствием для столь же быстрой пересылки команд управления состоянием объектов ТУ 26 в обратном направлении, от микропроцессорного контроллера 3 в блоки 5, 6 сопряжения. Рассматриваемый способ позволяет сохранить шинную организацию обмена данными между микропроцессорным контроллером 3 и блоками 5, 6 сопряжения. Такая организация может быть сохранена путем сохранения временного уплотнения соответствующих линий. Эффективность рассматриваемого способа обусловлена отказом не столько от временного уплотнения соответствующих линий, сколько от способа генерации управляющих сигналов, ввода и обработки данных, когда это является излишним. Такой предлагаемый способ обмена позволяет существенно снизить требования к вычислительным ресурсам микропроцессорного контроллера, точнее перераспределить так, чтобы они оказались достаточны для решения всех задач, которые должны решаться станцией управления.
При передаче информации в локальную сеть (ЛС) возникают проблемы совместного использования общего канала передачи данных и разрешения конфликтов между аналогичными станциями за право доступа к каналу. В качестве метода доступа к общему каналу принят двухуровневый метод доступа. Сущность этого метода заключается в организации доступа к каналу по прерыванию на фоне детерминированного метода доступа с передачей полномочий (права).
В соответствии с фоновым методом доступа, станция, получив право на использование общего канала, выдает свою информацию в сеть и передает полномочия другой станции. Для согласования взаимодействия станций устанавливается логическая последовательность (алгоритм) обслуживания канала, которая определяется при формировании ЛС. Одна и та же станция может входить в указанную последовательность более одного раза. Если очередная станция (с адресом N) из логической последовательности обслуживания канала по какой-либо причине в течение некоторого интервала времени не выходит на связь, доступ к каналу получает последняя отработавшая станция (т.е. станция с адресом N-1), которая сообщает об отсутствии в составе сети станций с адресом N. Следующей получить доступ к каналу будет пытаться станция с адресом N+1. При ее отсутствии указанная процедура повторяется.
Вначале рассмотрим ситуацию, в которой рассматриваемая станция является ведущей. Для передачи очередного байта передаваемого сообщения контроллер 3 загружает его в буферный регистр передатчика универсального синхронно-асинхронного приемопередатчика 2, а после чего он разворачивается в последовательность битов к которой домешивается универсальным синхронно-асинхронным приемопередатчиком 2 стартовый бит, бит контроля четности, стоповые биты. Эта последовательность подается на информационный (TD) вход модема 1, а из него в виде модулированного сигнала в линию связи. Очередной байт данных в параллельной форме пересылается контроллером 3 в 2 только тогда, когда буфер передатчика универсального синхронно-асинхронного приемопередатчика 2 уже пуст, передача предыдущего байта в модем 1 уже завершена. Сигналом об этом является переход в активное состояние линии готовности передатчика TRDY. Этот сигнал подается на вход узла 15 формирования запроса прерывания, с выхода которого запрос поступает на вход блока 10 формирования прерываний контроллера, а с его выхода на вход прерываний контроллера 3. В ответ на это прерывание контроллер 3 вводит вектор прерываний с выхода узла 11 формирования вектора прерываний модема, на входы которого заведены линии запроса прерывания от каждого из источников. Затем, когда установлено, что источником прерывания является сигнал TRDY, выполняется запись в 2 очередного байта данных. Запись эта выполняется контроллером 3 по шине данных.
Теперь рассмотрим ситуацию, когда рассматриваемая станция является ведомой. Принимаемая из линии последовательность частотномодулированных импульсов, образующих байт данных и его обрамление демодулируется демодулятором модема 1 и с его выхода уже в виде видеоимпульсов подается на вход RD приемника универсального синхронно-асинхронного приемопередатчика 2, где и накапливается в регистре приема. По окончании приема принятый байт данных уже в параллельной форме переписывается в буферный регистр приемника и переводится в активное состояние выход готовности приемника RRDY. Этот сигнал подается и на вход узла 15 формирования запроса прерываний и на вход узла 11 формирования вектора прерываний. В ходе реакции на этот запрос прерывания контроллер 3 выполняет операцию ввода вектора прерываний с выхода 11, а вслед за этим и принятого 2 байта данных, что сопровождается сбросом в пассивное состояние линии готовности приемника RRDY, чем и завершается прием очередного байта данных контроллером 3. Взаимодействие контроллера с 2 (ввод очередного байта данных из буферного регистра приемника) также выполняется по шине данных.
Наиболее сложной из операций взаимодействия контроллера 3 с каналом связи является операция его (канала) захвата вне очереди. В этой ситуации рассматриваеимый блок 9 управления модемом ожидает очередного окна, кратковременного выключения несущей передатчиком ведущей станции после передачи ею очередного сообщения. Когда несущая частота в канале исчезает, переходит в пассивное состояние сигнал распознавания несущей в канале DCD, подаваемый на входы и узла 15 формирования запроса прерываний и узла 11 формирования вектора прерываний. Процессор контроллера 3 прерывает выполнение текущей фоновой программы и в ходе выполнения программы обработки и прерываний выдает через порт вывода 4 сигнал запроса канала CREQ. Этот сигнал поступает на преобразователь параллельного кода в последовательный 12 и элемент 16, разрешая тем самым смену его состояния при приходе сигнала управления выхода элемента И 17. Преобразователь 12 разворачивает записанную в него в параллельной форме битовую комбинацию, выдавая ее в последовательной форме на информационный вход блока 13 коммутации и на управляющий вход элемента И 17. С выхода блока 13 коммутации разворачиваемая битовая захватная комбинация поступает на вход амплитудной модуляции несущей модема 1, а с его выхода уже в виде амплитудно-манипулированной последовательности в линию связи. Если рассматриваемая станция не имеет конкурентов в борьбе за канал связи, то элемент 16 так и останется в исходном состоянии, а последним импульсом в упомянутой выше захватной импульсной последовательности будет простробирована выдача контроллеру 3 сигнала САСК, прерывающего выполнение процессором фоновой программы и извещающего последний о захвате канала. Если же хотя бы в одном из нулевых битов захватной комбинации сигнал на инверсном входе элемента И 17 находится в состоянии логического нуля в канале окажется чужая несущая, несущая частота захватной комбинации конкурирующей станции, наличие которой отображается единичным уровнем сигнала DCD, подаваемого на управляющий вход элемента И 17, то выход этого элемента перейдет в активное состояние, а его сигнал, подаваемый на вход 16 повлечет за собой переключение элемента памяти 16.
Вследствие этого изменяются и инверсные друг другу сигналы на выходах 1 и 2 элемента памяти 16, подаваемые на входы 1 и 2 блока 14 формирования ответа на запрос. В результате этого контроллеру с выхода блока 14 будет выдан сигнал CREF, который прерывается выполнение фоновой программы и контроллер 3 информируется об отказе в предоставлении канала. Как и все прерывающие сигналы, сигнал CREF также подается и на вход узла 15 и на вход узла 11. При этом следует отметить, что в момент, когда сигналом DCD фиксируется отказ в канале, прекращается выдача в модем 1 оставшихся непереданными битов захватной комбинации. Это осуществляется выдачей в блок 13 коммутации сигнала запрета, получаемого с выхода элемента памяти 16.
Результатом как удовлетворительного, так и неудовлетворительного запроса является снятие контроллером 3 сигнала CREQ. Для того, чтобы выполнить повторную попытку захватить канал после отказа, контроллер 3 должен дождаться очередного прерывания по переходу сигнала DCD в пассивное состояние, а затем послать в 9 очередной сигнал запроса CREQ.
И, наконец, рассмотрим ситуацию, при которой канал передается рассматриваемой станции в порядке очередности после завершения работы в режиме передачи станции, которая в установленном порядке очередности предшествует рассматриваемой.
О том, что рассматриваемой станции предстоит стать ведущей, она информируется предыдущей станцией косвенным образом в состав каждого передаваемого ведущей в данный момент станцией сообщения включается среди прочих обрамляющих данных и ее номер, а эти сообщения принимаются и передаются своим контроллерам приемниками всех в данный момент пассивных станций сети.
Поэтому, когда предыдущая станция завершает передачу пакета сообщений (информация о том, что текущее сообщение является последним в пакете входит в его (последнего сообщения) обрамление) и выключает свою несущую частоту, то, как уже отмечалось выше, это сопровождается подачей контроллеру запроса прерывания, который как и ранее создается переходом сигнала DCD в пассивное состояние. Этот сигнал, подаваемый на входы 3 узла 15 формирования запроса прерывания и узла 11 формирования вектора прерывания, сопровождается передачей управления от фоновой программы программе обработки прерывания, той же программе, которая работает при выключении несущей и в ситуация, связанных со внеочередным захватом канала. Однако теперь реакция контроллера 3 на изменение сигнала DCD будет уже другой, так как рассматриваемая станция не имеет срочной информации, которая должна быть передана вне очереди. В рассматриваемой ситуации в ответ на прерывание, вызванное переходом сигнала DCD в пассивное состояние процессор запускает таймер (он входит в состав контроллера 3), отсчитывающий интервал времени, необходимый для внеочередного захвата канала другими станциями, если у них есть информация, которая подлежит срочной передаче. Если приемник рассматриваемой станции обнаруживает чужую несущую частоту до истечения выдержки времени, отсчитываемой таймером, то ее (рассматриваемой станции) контроллер под управлением программы возвращается в пассивное состояние и отказывается от продолжения операций по захвату канала в порядке очередности и переходит на выполнение фоновых программ, в том числе и программ приема сообщений из канала.
Следующая попытка захватить канал будет им сделана после того, как уже описанными последовательностями сигналов будет в очередной раз прервано сменой сигнала DCD выполнений текущих операций процессора, иначе говоря, когда станция, захватившая канал вне очереди кратковременно выключит свою несущую частоту в знак отказа от роли ведущей станции.
Если же до окончания выдержки времени, отсчитываемой упомянутым таймером, чужая несущая частота в канале связи так и не появится, то срабатывание таймера вызовет прерывание процессора, а управление будет передано программам, управляющим переходом рассматриваемой станции в режим ведущей.
Использование предлагаемой системы контроля и управления высоковольтными ячейками распределительной сети шахты обеспечивает по сравнению с существующими системами следующие преимущества:
снижение времени реакции системы на изменение состояния контролируемых объектов благодаря повышению скорости чисто аппаратного опроса в совокупности с прерыванием от объектов, изменивших свое состояние;
иерархическая структура доступа к локальной сети, позволяющая снижать время ожидания передачи информации в зависимости от ее важности (уровни приоритета разных категорий устанавливаются пользователем);
непрерывный контроль исправности линии связи позволяет повысить надежность и достоверность передачи информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сопряжения абонента с каналом связи | 1987 |
|
SU1508225A1 |
| Станция локальной сети | 1990 |
|
SU1824640A1 |
| Устройство для контроля телефонных линий | 1990 |
|
SU1793557A1 |
| МУЛЬТИПЛЕКСОР ТЕЛЕКОММУНИКАЦИОННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ | 2004 |
|
RU2269154C1 |
| Устройство для сопряжения ЭВМ с каналом связи | 1988 |
|
SU1587524A1 |
| Устройство для сопряжения электронно-вычислительной машины с группой внешних устройств | 1989 |
|
SU1734098A1 |
| Многопроцессорная система | 1988 |
|
SU1605247A1 |
| Запоминающее устройство на цилиндрических магнитных доменах | 1987 |
|
SU1451768A1 |
| Устройство для сопряжения ЭВМ с периферийной системой | 1989 |
|
SU1635188A1 |
| Устройство для сопряжения магистрали ЭВМ с периферийными устройствами | 1990 |
|
SU1751775A1 |
Система относится к электроэнергетике и предназначена для автоматизации управления высоковольтными распределительными пунктами угольных шахт. В качестве основы для построения системы используется станция управления. Станция управления содержит контроллер 3, ориентированный на решение задач контроля и управления. Контроллер 3 через магистраль связи соединен с блоком 7 диагностики и блоком 5 сопряжения. Благодаря использованию последних, а также блока 8 формирования адреса в системе применен способ аппаратно-программного опроса объектов 26 и 28, позволяющий снизить время реакции системы на изменение состояния датчика. Для снижения времени ожидания передачи информации в линию связи на станции управления установлен блок 9 управления модемом. Целью изобретения является повышение быстродействия и достоверности системы. 2 ил.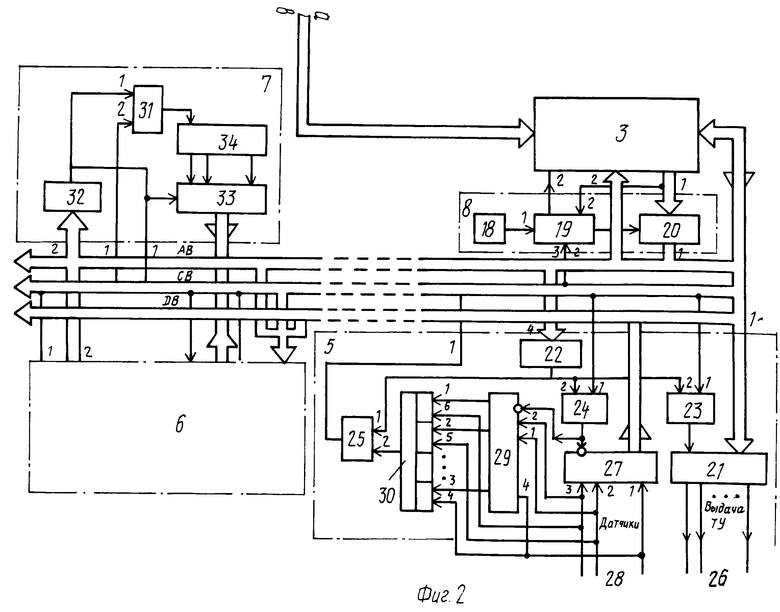
СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ВЫСОКОВОЛЬТНЫМИ ЯЧЕЙКАМИ РАСПРЕДЕЛИТЕЛЬНОЙ СЕТИ ШАХТЫ, содержащая модем, первый вход которого соединен с первым выходом асинхронного приемопередатчика, первый вход которого подключен к первому выходу модема, блок ввода, входы-выходы которого подключены к системной магистрали, контроллер, первые входы которого объединены с соответствующими входами асинхронного приемопередатчика через системную магистраль, отличающаяся тем, что, с целью повышения быстродействия и достоверности системы, в нее введены первый и второй блоки сопряжения, блок диагностики, блок формирования адреса и блок управления модемом, содержащий блок формирования прерывания контроллера, узел формирования вектора прерывания модема, преобразователь параллельного кода в последовательный, блок коммутации, блок формирования ответа на запрос, узел формирования запроса прерывания, элемент памяти и элемент И, выход которого соединен с первым входом элемента памяти, второй вход которого объединен с входом преобразователя параллельного кода в последовательный и является первым входом блока управления модемом, первый и второй выходы элемента памяти подключены к одноименным входам блока формирования ответа на запрос, третий вход которого соединен с первым выходом преобразователя параллельного кода в последовательный, второй выход которого соединен с инверсным входом элемента И и с первым входом блока коммутации, второй вход которого соединен с третьим выходом элемента памяти, выход блока коммутации является выходом блока управления модемом, прямой вход элемента И объединен с первыми входами узла формирования запроса прерывания и узла формирования вектора прерывания модема и является вторым входом блока управления модемом, первый и второй выходы блока формирования ответа на запрос подключены к второму и третьему входам узла формирования запроса прерывания соответственно, четвертый вход которого объединен с вторым входом узла формирования вектора прерывания модема и является третьим входом блока управления модемом, пятый вход узла формирования запроса прерывания объединен с третьим входом узла формирования вектора прерывания модема и является четвертым входом блока управления модемом, четвертый и пятый входы узла формирования вектора прерывания модема объединены с третьим и вторым входами узла формирования запроса прерывания соответственно, выход узла формирования запроса прерывания соединен с входом блока формирования прерывания контроллера, входы группы преобразователя параллельного кода в последовательный, узла формирования вектора прерывания модема и блока формирования прерывания контроллера являются соответственно пятым, шестым и седьмым входами блока управления модемом, блок формирования адреса содержит генератор, узел управления формирования адреса и формирователь адреса, выход генератора соединен с первым входом узла управления формирования адреса, второй вход которого объединен с входами формирователя адреса и является первым входом блока формирования адреса, третий вход узла управления формирования адреса является вторым входом блока формирования адреса, первый выход узла управления формирования адреса соединен с входом формирователя адреса, выходы которого являются первым выходом блока формирования адреса, второй выход узла управления формирования адреса является вторым выходом блока формирования адреса, блок диагностики, содержащий элемент И, дешифратор, коммутатор и блок формирования тестовых сигналов, вход которого соединен с выходом элемента И, выходы блока формирования тестовых сигналов подключены к одноименным входам коммутатора, вход которого объединен с первым входом элемента И, подключен к выходу дешифратора и является первым входом блока диагностики, второй вход элемента И является первым входом блока диагностики, входы дешифратора являются вторым выходом блока диагностики, выходы коммутатора вторым выходом блока диагностики, первый блок сопряжения содержит первый третий элементы И, коммутатор, блок сравнения, первый и второй регистры, группа входов первого регистра является первым входом блока сопряжения, первый вход первого элемента И вторым входом блока сопряжения, первый вход второго элемента И третьим входом блока сопряжения, первый вход третьего элемента И объединен с вторыми входами первого и второго элементов И и подключен к выходу дешифратора, группа входов которого является четвертым входом блока сопряжения, второй вход третьего элемента И соединен с выходом блока сравнения, выход третьего элемента И является первым выходом блока сопряжения, вход первого регистра соединен с выходом первого элемента И, выход второго элемента И подключен к инверсным входам коммутатора и второго регистра, выходы коммутатора являются вторым выходом блока сопряжения, выходы первого регистра третьим выходом блока сопряжения, первый, второй и третий выходы второго регистра подключены к одноименным входам блока сравнения, четвертый выход второго регистра к одноименному входу блока сравнения и к первому входу коммутатора, второй вход которого объединен с первым входом второго регистра и с пятым входом блока сравнения, шестой вход которого объединен с вторым входом второго регистра и с третьим входом коммутатора, первый, второй и третий входы коммутатора являются пятым входом блока сопряжения, вход-выход контроллера подключен к первому входу первого блока сопряжения и объединен с шинами системной магистрали, третий вход контроллера соединен с вторым выходом блока формирования адреса, выход контроллера с первым входом блока формирования адреса, второй вход блока формирования адреса, второй и третий входы и первый выход первого блока сопряжения подключены к шине управления системной магистрали, второй выход первого блока сопряжения подключен к информационной шине системной магистрали, четвертый вход первого блока сопряжения, второй вход контроллера и первый выход блока формирования адреса подключены к адресной шине системной магистрали, первый вход второго блока сопряжения соединен с соответствующими шинами системной магистрали, второй и третий входы второго блока сопряжения и его первый выход и первые вход и выход блока диагностики подключены к шине управления системной магистрали, второй выход второго блока сопряжения соединен с вторым входом блока диагностики, третий выход второго блока сопряжения подключен к информационной шине системной магистрали, второй выход блока диагностики соединен с адресной шиной системной магистрали, первый выход блока управления модемом подключен к второму входу модема, первый вход блока управления модемом соединен с выходом блока ввода, второй вход блока управления модемом подключен к второму выходу модема, вход-выход которого соединен с линией связи, третий и четвертый входы блока управления модемом соединены с вторым и третьим выходами асинхронного приемопередатчика соответственно, пятый, шестой и седьмой входы блока управления модемом подключены к шинам системной магистрали соответственно.
| Проспект фирмы Huword Electric Limited "Система дистанционного контроля и управления SENTRIE MINOS |
