Изобретение относится к средствам аварийного останова и может быть использовано в текстильных машинах, преимущественно в ткацких станках с ремизоподъемной кареткой.
Известно устройство для автоматического останова ткацкого станка, содержащее датчики технологических параметров, датчик положения главного вала, исполнительный механизм останова станка, блок формирователей импульсов, блок запуска, регистр сдвига, счетчик импульсов, схему совпадения, генератор и формирователь тактовых импульсов. К недостаткам устройства следует отнести отсутствие возможности установления точной причины останова (номер несработавшей рамки).
Наиболее близким по технической сущности и достигаемому положительному эффекту к заявляемому изобретению являются способ и устройство контроля машинных прометок в ремизоподъемной каретке. Предлагаемый в прототипе способ контроля работы ремизных рамок включает следующую последовательность операций: определение вертикальных положений ремизных рамок в течение одного цикла, соответствующего программе выработки данного артикула ткани; сохранение последовательности определенных положений всех ремизных рамок; сравнение сохраненных положение рамок с положениями, определенными для следующего цикла; формирование управляющего сигнала при несовпадении сохраненных и вновь определенных положений рамок.
Предложенное в прототипе устройство содержит средства для выполнения описанных выше операций, а именно датчики вертикального положения ремизных рамок, блок памяти для хранения измеренных положений рамок, блок сравнения, блок формирования сигнала останова станка и блок индикации. Для задания длины программы переплетений предлагается использование клавиатуры.
Недостаток прототипа недостаточная достоверность результатов контроля. При реальной работе ткацкого станка происходят аварийные остановы, не связанные с контролем работы ремизных рамок, при которых нарушается последовательность движений ремизных рамок по сравнению с заданной программой переплетений. Например, при обрыве уточной нити, необходимо выполнять операцию "розыск раза" для извлечения оборванной нити. Программа переплетений выполняется в обратной последовательности, что приводит к искажению измеряемой последовательности положений рамок по отношению к сохраненной. При использовании прототипа в этом случае должны появляться ложные остановы станка и как следствие, необходимость повторного формирования программы для восстановления синхронизации. При устойчивой неисправности в работе ремизных рамок, например обрыве тяги одной из рамок, предлагаемый метод не дает положительного результата, так как измеряемые последовательности положений рамок совпадают между собой, но не соответствуют требуемым для данного артикула ткани. Те же недостатки характерны и для предложенного в прототипе устройства.
Цель изобретения повышение достоверности контроля работы ремизных рамок с учетом реальных условий работы ткацкого станка и упрощение конструкции соответствующего устройства.
Сущность изобретения состоит в том, что при несовпадении фактических положений ремизных рамок заданным в текущем кадре программы производят условную синхронизацию программы работы ремизной каретки с фактическими положениями рамок. Программа работы ремизных рамок (программа переплетений) рассматривается как ограниченная последовательность кадров, каждый из которых содержит информацию о соответствующем наборе положений всех ремизных рамок. Порядок кадров соответствует последовательности положений рамок в точках выстоя при каждом обороте главного вала станка в процессе выработки ткани. Сущность условной синхронизации программы работы ремизных рамок состоит в том, что существуют ситуации, когда неизвестно, какому кадру программы соответствует текущее положение ремизных рамок. В таких ситуациях несовпадение фактических положений рамок с заданными в текущем кадре может объясняться двумя причинами: заданные положения взяты из несоответствующего кадра; неправильная работа ремизных рамок.
Для того, чтобы различать эти причины, используется следующий способ. Если синхронизация программы работы рамок с их фактическими положениями не установлена, делается попытка установления синхронизации. Если фактические положения рамок не соответствуют заданным в текущем кадре программы, то они сравниваются со следующим кадром программы до тех пор, пока не произойдет совпадения или пока не будут просмотрены все кадры программы. В последнем случае фиксируется неисправность работы ремизных рамок. Синхронизация программы считается установленной, если количество последовательно совпавших с кадрами программы положений ремизных рамок равно количеству кадров программы.
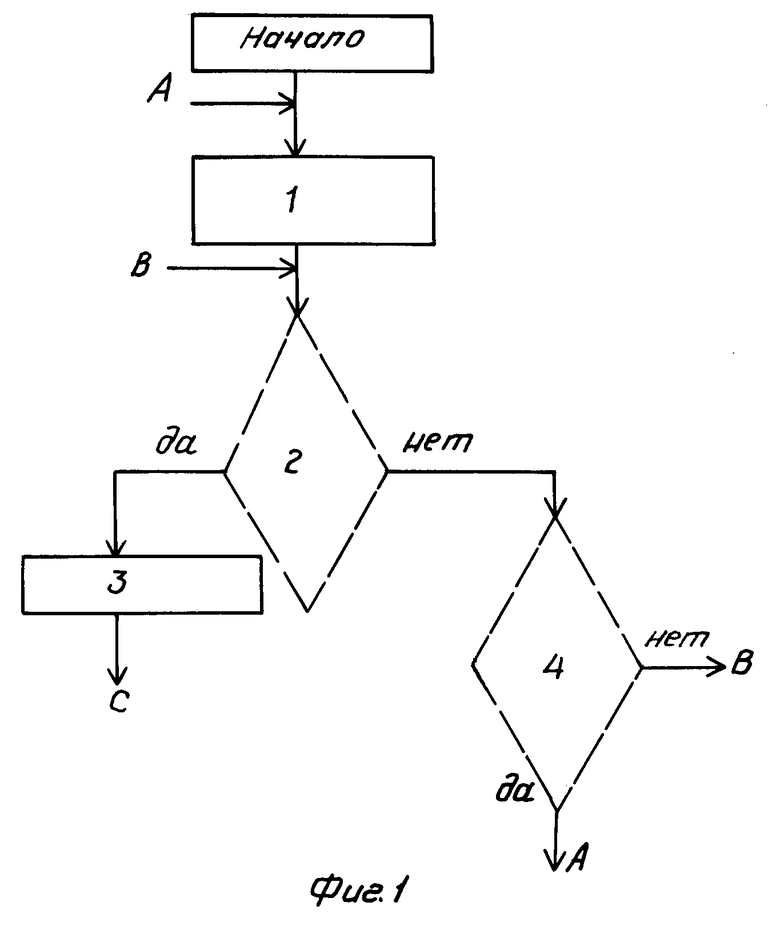
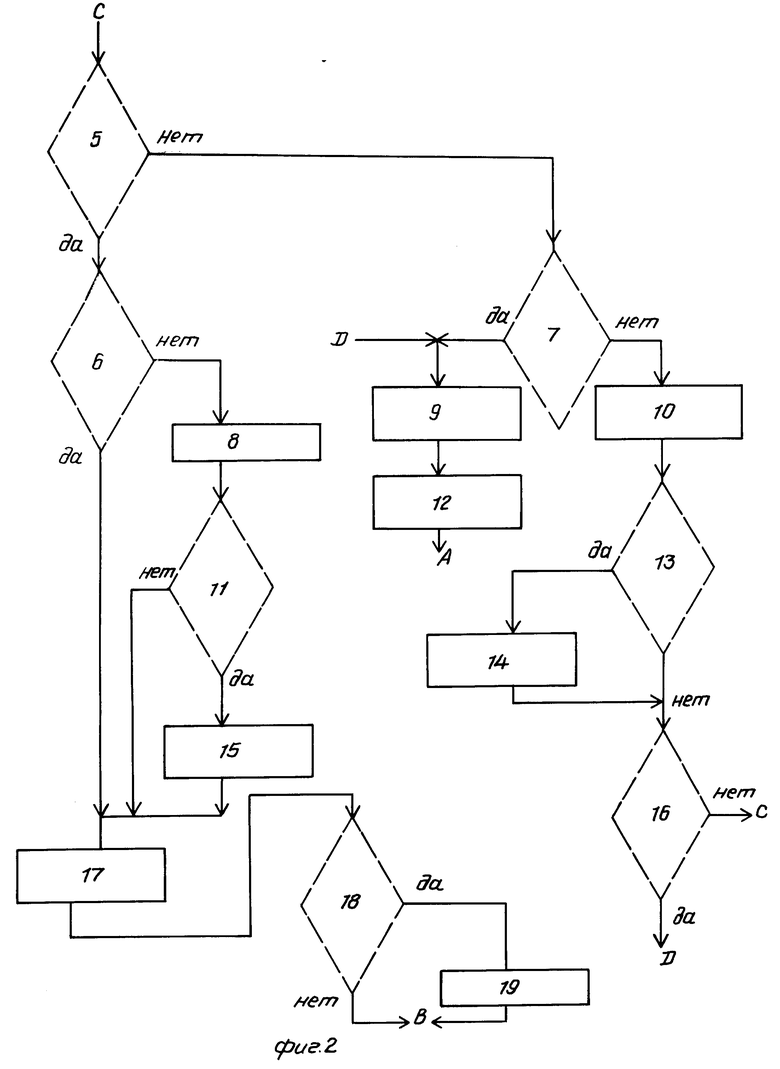
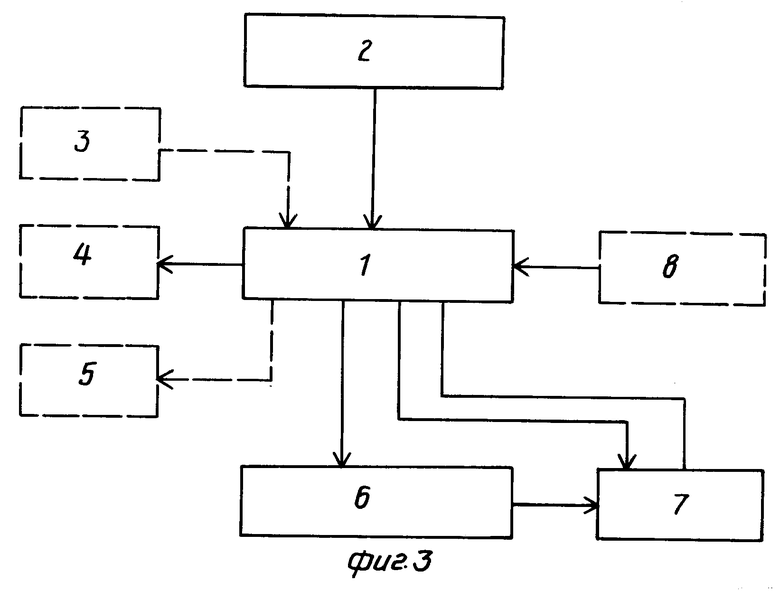
На фиг. 1 и 2 приведен алгоритм способа контроля работы ремизных рамок; на фиг. 3 структурная схема устройства контроля.
Способ осуществляется следующим образом. Вначале устанавливается в единицу счетчик кадров программы N, cбрасываются счетчики совпавших Nс и несовпадавших Nn кадров и признак синхронизации программы FSYN (шаг 1). Затем ожидается синхросигнал (шаг 2), при поступлении которого считываются показания датчиков положения рамок S(N) (шаг 3). Если синхросигнал не поступает в течение заданного времени (шаг 4), станок считается остановленным и признак синхронизации сбрасывается (шаг 1). После считывания S(N), эти показания сравниваются с заданными по программе положениями рамок Р(N) (шаг 5). При совпадении проверяется признак синхронизации (шаг 6) и, если он не установлен, увеличивается счетчик совпавших кадров Nc (шаг 8). Если счетчик Nc достиг количества кадров программы Nр (шаг 11), устанавливается признак синхронизации (шаг 15). Затем увеличивается счетчик кадров программы N и сбрасывается счетчик несовпавших кадров Nn (шаг 17). При достижении счетчиком кадров программы N ее конца (шаг 18), его значение устанавливается в исходное состояние (шаг 19). При несовпадении показаний датчиков с заданными (шаг 5) проверяется значение признака синхронизации (шаг 7). Если признак синхронизации FSYN установлен, производится останов станка (шаг 9) и индикация о причинах остановки (шаг 12). Если FSYN не установлен, сбрасывается счетчик Nc совпавших кадров и увеличиваются счетчики N и Nn кадров программы достиг ее конца (шаг 13), он устанавливается в исходное состояние (шаг 14). Затем количество несовпавших кадров Nn сравнивается с количеством кадров программы Nр (шаг 16). При достижении этой величины производится останов станка и индикация о причине (шаги 9 и 12), иначе производится сравнение считанных показаний датчиков с содержанием следующего кадра программы (шаг 5).
Устройство изображено на фиг. 3. Сплошными линиями показаны блоки и связи между ними, соответствующие основному (четвертому) пункту формулы изобретения, а пунктирные блоки и связи соответствуют дополнительным пунктам формулы. Устройство содержит блок 1 синхронизации кадров программы, к первому входу которого подключены датчики 2 положения ремизных рамок, ко второму входу блок 7 сравнения, к третьему входу синхросигнал контроля положений ремизных рамок, к четвертому входу переключатель программ. Первый выход блока 1 подключен к первому входу блока 7 сравнения, второй выход к входу 6 блока памяти, выход которого подключен ко второму входу блока (7), третий выход блока (1) подключен ко входу блока 4 останова станка, четвертый выход ко входу блока 5 индикации. Синхросигнал может формироваться датчиком 3 положения главного вала. Устройство работает следующим образом. При включении питания блок синхронизации кадров программы (1) устанавливается в исходное состояние. Затем по синхросигналу считываются показания датчиков 2 ремизных рамок. В качестве источника синхросигнала можно использовать датчик 3 положения главного вала. Одновременно данные о заданных положениях рамок по сигналу от блока 1 синхронизации передаются из блока 6 памяти в блок 7 поразрядного сравнения, а код датчиков 2 передается из блока 1 синхронизации в блок 7 сравнения. По управляющему сигналу блока 1 на выходе блока 2 появляется результат поразрядного сравнения показаний датчиков 2 и заданных положений из блока памяти 6. Если данные совпадают, блок 1 синхронизации увеличивает содержание счетчика кадров программы и счетчика совпавших кадров, после чего ожидается следующий синхросигнал. При несовпадении данных блок 1 реализует описанный в способе алгоритм.
При введении в состав устройства блока 4 останова, подключенного к третьему входу блока 1, устройство непосредственно вызывает останов станка при нарушениях в работе ремизных рамок.
При введении в состав устройства блока 5 индикации, подключенного к четвертому входу блока 1, на блоке 5 индикации отображается информация о состоянии рамок и возникающих неисправностях.
При введении в состав устройства блока 8 переключателей после включения питания состояние переключателей считывается блоком 1 для определения адреса в блоке 6 памяти, по которому записано начало программы соответствующего артикула ткани. Например, состояния переключателей 8 могут непосредственно определять значения старших адресных разрядов в блоке 6 памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля функционирования логических блоков | 1986 |
|
SU1327107A1 |
| Устройство для тестового диагностирования логических блоков | 1976 |
|
SU661552A1 |
| Устройство кадровой синхронизации | 1989 |
|
SU1817084A1 |
| Устройство для отладки программ | 1986 |
|
SU1399745A1 |
| Система для программного управления | 1985 |
|
SU1251033A1 |
| Устройство для контроля динамических блоков памяти | 1985 |
|
SU1282221A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство для контроля и диагностики цифровых узлов | 1987 |
|
SU1587513A1 |
| Устройство для отладки и контроля хода программ | 1989 |
|
SU1691843A2 |
| Устройство для управления с контролем | 1983 |
|
SU1156074A1 |
Сущность изобретения: способ контроля работы ремизных рамок на ткацком станке отличается тем, что при несовпадении фактических и заданных положений рамок сравнивают фактические положения рамок с заданными по следующим кадрам программы положениями до их совпадения или до окончания программы. Синхронизация считается достигнутой при последовательном совпадении фактических положений рамок с заданными по всем кадрам программы. 2 с и 6 з.п. ф-лы, 3 ил.
| Патент США N 4827986, кл | |||
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
