Изобретение относится к системам автоматического управления и может быть использовано в цифровых следящих системах управления электродвигателями и электроприводами постоянного тока.
Известно устройство, в котором управление цифровым электроприводом осуществляется от ЭВМ.
Известна система управления цифровым приводом.
К недостаткам данных устройств следует отнести наличие нескольких датчиков (положения и скорости) для обеспечения требуемого быстродействия и точности позиционирования.
Известна также цифровая следящая система. Она частично свободна от указанных недостатков и обеспечивает требуемые динамические и точностные характеристики при использовании только цифрового датчика положения.
Известная цифровая следящая система содержит первое корректирующее устройство, блок задания скорости, формирователь импульсов скорости, второе корректирующее устройство, устройство выборки групп ключей мостового инвертора, мостовой инвертор, исполнительный электродвигатель, цифровой датчик узла, логическое устройство. Данная система наиболее близка по технической сущности к изобретению и принята за прототип.
На первый информационный вход системы (третий вход первого корректирующего устройства) подается сигнал о направлении перемещения, который в случае отсутствия блокирующего сигнала с логического устройства поступает через первое корректирующее устройство на третий вход устройства выборки групп ключей и тем самым осуществляет выбор соответствующей группы ключей мостового инвертора и обеспечивает направление вращения вала электродвигателя в ту или иную сторону.
На второй информационный вход системы (четвертый вход первого корректирующего устройства) подается сигнал о необходимом перемещении, на основании которого в первом корректирующем устройстве формируется значение номинальной скорости в виде двоичного параллельного кода, поступающего на вход блока задания скорости, и определяется момент достижения системой номинального значения скорости и переключения системы на режим торможения.
Блок задания скорости предназначен для обеспечения постепенного достижения системой значения номинальной скорости и при торможении для обеспечения постепенного уменьшения скорости до нуля. Он выдает на вход формирователя импульсов скорости текущее значение скорости в виде параллельного двоичного кода. Формирователь формирует импульсы желаемой скорости в виде двоичного последовательного кода, частота которых является функцией текущего значения скорости, поступающие на первый вход второго корректирующего устройства, на второй вход которого поступают импульсы от логического устройства, который определяет величину скорости и направление перемещения. В момент несовпадения импульсов желаемой и реальной скорости второе корректирующее устройство обеспечивает соответствующее управление устройством выборки групп ключей и, следовательно, коммутацию ключей мостового инвертора в последовательности, обеспечивающей заданную точность позиционирования и требуемые динамические характеристики при управлении исполнительным двигателем.
К недостатком данной системы управления следует отнести неполное использование динамических возможностей электропривода в части быстродействия, поскольку блок задания скорости обеспечивает постепенное достижение скорости при разгоне и постепенное снижение скорости до нуля при торможении. В энергетическом отношении подобный режим работы системы не является оптимальным, так как характеризуется повышенными потерями мощности. К недостаткам данной системы также можно отнести очевидную сложность реализации.
Целью изобретения является повышение быстродействия.
Цель достигается тем, что в цифровую следящую систему, содержащую устройство выборки групп ключей мостового инвертора, соединенное через мостовой инвертор с входом исполнительного электродвигателя, выход которого соединен с входом цифрового датчика угла, введены блок определения направления вращения и углового рассогласования, первый и второй блоки разрешения включения режима торможения, первый и второй элементы ИЛИ и блок периодического включения режима торможения, при этом выход цифрового датчика угла соединен с первым входом блока определения направления вращения и углового рассогласования, первый выход которого соединен одновременно с входами первого и второго блоков разрешения включения режима торможения, выходы которых через первый элемент ИЛИ соединены с входом блока периодического включения режима торможения, выход которого соединен с первым входом второго элемента ИЛИ, второй вход которого соединен с вторым выходом блока определения направления вращения и углового рассогласования, а выход с первым входом устройства выборки групп ключей мостового инвертора, второй вход которого соединен с третьим выходом блока определения направления вращения и углового рассогласования, второй вход которого является информационным входом цифровой следящей системы.
Сопоставительный анализ с прототипом показывает, что заявляемая система отличается наличием новых блоков: первого и второго блоков разрешения включения режима торможения, блока определения направления вращения и углового рассогласования, первого и второго элементов ИЛИ, блока периодического включения режима торможения. Таким образом, заявляемая система соответствует критерию изобретения "новизна".
Сравнение заявляемой системы с другими техническими решениями показывает, что блок определения направления вращения и углового рассогласования, элементы ИЛИ известны. Однако при их введении в указанной связи с остальными элементами в цифровую следящую систему они проявляют новые свойства, что приводит к повышению быстродействия. Блоки разрешения включения режимов торможения и блок периодического включения режима торможения не известны. Это позволяет сделать вывод о соответствии предлагаемого технического решения критерию "существенные отличия".
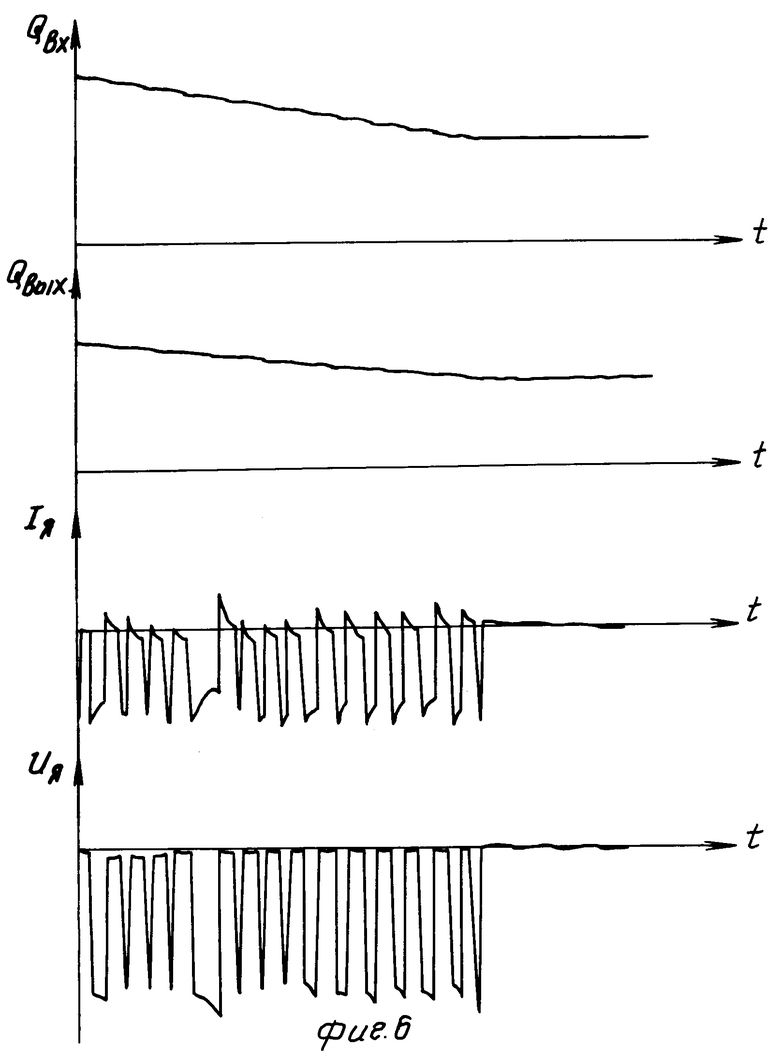
На фиг.1 приведена функциональная схема цифровой следящей системы, где 1 устройство выборки групп ключей мостового инвертора 2, 3 исполнительный электродвигатель, 4 цифровой датчик угла, 5 блок определения направления вращения и углового рассогласования, 6 первый блок разрешения включения режима торможения, 7 второй блок разрешения включения режима торможения, 8 первый элемент ИЛИ, 9 блок периодического включения режима торможения, 10 второй элемент ИЛИ.
Устройство 1 выборки групп ключей мостового инвертора 2 через мостовой инвертор соединено с входом исполнительного электродвигателя 3, выход которого через цифровой датчик 4 угла соединен с первым входом блока 5 определения направления вращения и углового рассогласования. Первый выход блока 5 соединен одновременно с входами первого 6 и второго 7 блоков разрешения включения режима торможения, выходы которых через первый элемент ИЛИ 8 соединен с входом блока 9 периодического включения режима торможения. Выход блока 9 соединен с первым входом второго элемента ИЛИ 10, второй вход которого соединен с вторым выходом блока 5 определения направления вращения и углового рассогласования, а выход с первым входом устройства 1 выборки групп ключей мостового инвертора. Второй вход устройства 1 соединен с третьим выходом блока 5 определения направления вращения и углового рассогласования, второй вход которого является информационным входом цифровой следящей системы.
Работает предлагаемая следящая система следующим образом.
На первый вход блока 5 поступает код с цифрового датчика 4 угла, на второй вход управляющий код от внешнего устройства. В результате работы блока 5 на его первом выходе выделяется разностный сигнал углового рассогласования в виде параллельного двоичного кода, на втором выходе сигнал о равенстве двух поданых кодов, на третьем выходе сигнал знака разности, который поступает на второй вход устройства 1 и по которому определяется направление вращения электродвигателя 3. При отсутствии сигнала включения режима торможения, поступающего с выхода второго элемента ИЛИ 10 на первый вход устройства 1, в последнем обеспечивается открывание той или иной диагонали мостового инвертора и тем самым максимально возможное нарастание скорости вращения электродвигателя до номинальной величины и его вращение в ту или иную сторону в зависимости от направления тока через его обмотку с максимально возможной скоростью. С выходным валом электродвигателя механически связан цифровой датчика 4 угла, информация с которого поступает в виде цифрового параллельного кода для сравнения в блок 5. Если разность входного и выходного кодов положительна и достигнет определенной величины, например единицы младшего разряда датчика 4, заранее заложенной в блок 6, то на его выходе появляется сигнал, который через элемент ИЛИ 8 поступает на блок 9 и запускает его (в исходный момент на выходе элемента ИЛИ 8 присутствует сигнал, блокирующий работу блока 9). В результате на первый вход элемента ИЛИ 10 поступает первый импульс включения режима торможения.
На второй вход элемента ИЛИ 10 поступает сигнал включения режима торможения с второго выхода блока 5 только в том случае, если сравниваемые коды равны, т.е. если электродвигатель отработал заданный угол. Если рассогласование имеет место, то сигнал включения режима торможения снимается и не влияет на работу блоков 1 и 10.
При поступлении импульса включения режима торможения, длительность которого выбирается в зависимости от максимальной скорости вращения электродвигателя и заранее закладывается в блоке 9 при изготовлении, в устройстве 1 обеспечивается коммутация групп ключей таким образом, чтобы переключить мостовой инвертор в режим форсированного (динамического) торможения, наиболее эффективный также в энергетическом отношении. По инерции электродвигатель продолжает вращаться, но убывание скорости от максимальной до нуля происходит за минимально возможное время. Если не включать заранее до совпадения кодов на входах блока 5 режима торможения, то за счет инерции электродвигатель может выйти из заданной зоны позиционирования в следующее положение датчика 4 угла, что ведет к резкому ухудшению динамических характеристик системы и значительным временным задержкам на возврат электродвигателя в заданное положение. Использование блоков 6, 7, 8 и 9 позволяет включать режим динамического торможения до совпадения кодов на входах блока 5 и тем самым обеспечить предварительное торможение электродвигателя перед его входом в заданную зону позиционирования. В этот момент на втором выходе блока 5 появляется сигнал о равенстве кодов, который через элемент ИЛИ 10 подтверждает режим динамического торможения для электродвигателя. Таким образом, полная остановка электродвигателя осуществляется в заданной зоне позиционирования и он удерживается в нем сигналом, сформированным на втором выходе блока 5, при этом на его первом выходе код рассогласования становится нулевым и по этому сигналу отключаются блоки 6, 7, 8 и 9. Сигнал с третьего выхода блока 5 не влияет на работу системы до тех пор, пока на ее информационный вход не будет подан новый код управления, с второго выхода блока 5 не будет снят блокирующий сигнал включения режима торможения. Если новый управляющий код такой, что разность между ним и кодом с датчика 4 угла отрицательна, то значение углового рассогласования в виде параллельного кода появляется на первом выходе блока 5, на втором его выходе снимается сигнал о равенстве кодов и, следовательно, с первого входа устройства 1 снимется сигнал включения режима торможения. Знак углового рассогласования с третьего выхода блока 5 поступает на второй вход устройства 1 включается другая диагональ мостового инвертора и на обмотку якоря электродвигателя подается полное напряжение питания обратного знака. В результате электродвигатель начинает вращаться в обратном направлении с максимальной скоростью. По мере вращения на первом выходе блока 5 происходит смена кодов углового рассогласования. Как только его величина достигает значения, записанного в блоке 7, на его выходе появляется сигнал, который через элемент ИЛИ 8 запускает блок 9 и на его выходе формируется импульс, поступающий через элемент ИЛИ 10 на первый вход устройства 1, включающего ту группу ключей мостового инвертора 2, которая обеспечивает форсированное торможение электродвигателя в течение промежутка времени, записанного в блоке 9. Если в течение этого времени электродвигатель по инерции вошел в заданную зону позиционирования, то в дальнейшем он удерживается в режиме динамического торможения сигналом с второго выхода блока 5, как было указано выше. При больших моментах на валу электродвигателя торможение и полная остановка могут закончиться до входа электродвигателя в заданную зону позиционирования, в этом случае по окончании импульса торможения, с выхода блока 9 формируются импульсы, в течение которых электродвигатель досылается в заданную зону.
На первом входе устройства 1 снимается сигнал переключения в режим торможения на время, также зафиксированное в блоке 9, и электродвигатель продолжает вращение в том же направлении до достижения заданной зоны позиционирования. Если по окончании времени на досыл электродвигатель не отработал заданный угол, то блоком 9 периодически формируются импульсы, в течение которых электродвигатель последовательно досылается в заданную зону позиционирования.
Повышение быстродействия в предлагаемой цифровой следящей системе достигается за счет того, что отработка поданного кода управления осуществляется с максимально возможной скоростью, поскольку в момент подачи управляющего кода на вход блока 5 на выходе мостового инвентора формируется полное напряжение питания того или иного знака в зависимости от направления вращения, подаваемое на обмотку якоря электродвигателя. Поэтому выход электродвигателя на номинальную скорость осуществляется с максимально возможным быстродействием. Вращение электродвигателя также осуществляется с максимально возможной скоростью.
Для уменьшения времени торможения в предлагаемой системе используется форсированное (динамическое) торможение, включаемое до входа электродвигателя в заданную зону позиционирования, что позволяет исключить перерегулирование в системе, сохранив одновременно точность отработки управляющего кода. При номинальной величине нагрузки торможение электродвигателя начинается в течение первого импульса включения режима торможения, сформированного в блоке 9, электродвигатель по инерции входит в заданную зону позиционирования, где происходит его полная остановка по сигналу режима торможения с второго выхода блока 5 при равенстве кодов управления и обратной связи. Этим сигналом электродвигатель и удерживается в заданном положении.
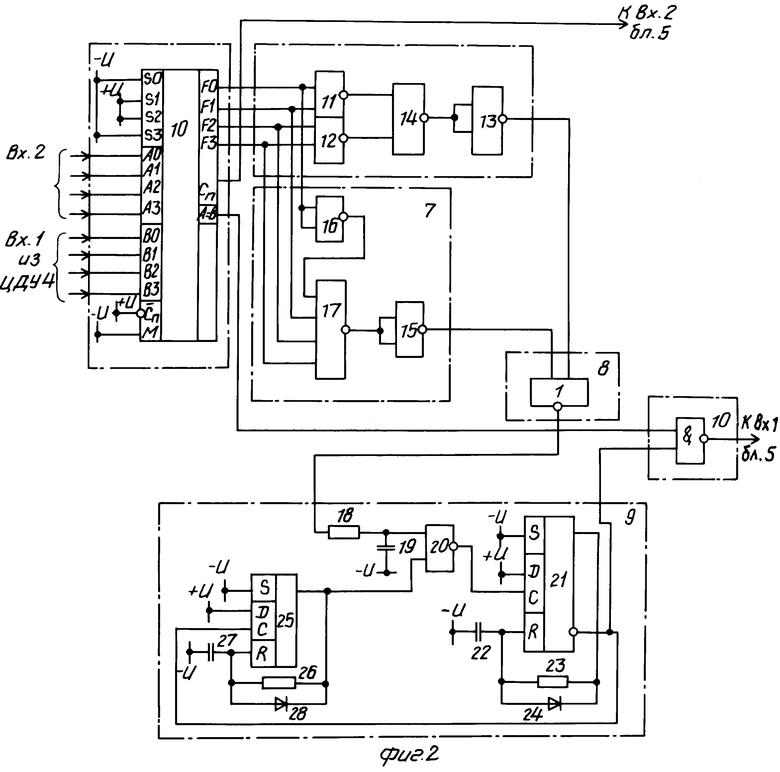
На фиг. 2 приведена возможная реализация блоков 5-10. Так, блок 5 может быть реализован на микросхеме 564ИП3 (параллельное четырехразрядное арифметическо-логическое устройство АЛУ). Многоразрядное АЛУ собирают из нескольких корпусов 564ИП3 совместно с внешней схемой ускоренного переноса 564ИП4, при этом многоразрядный выход АЛУ соединяется с многоразрядными входами блоков 6 и 7.
АЛУ 564ИП3 реализует в данном случае арифметическую операцию А-В-1. Код данной операции набирается на входах S0, S1, S2, S3 (0110), при этом на вход М подает уровень "0", означающий переключение в режим выполнения арифметических операций. Подача на вход  уровня "1" означает, что выполняемая операция производится с активными напряжениями высокого уровня. На входы А0, А1, А2, А3 подается управляющий многоразрядный двоичный код от внешнего устройства (слово А), на входы В0, В1, В2, В3 подается информация с датчика 4 угла в виде параллельного многоразрядного двоичного кода (слово В), В результате выполнения операции А-В-1 на выходах F0, F1, F2, F3 появляется результат операции в виде многоразрядного двоичного кода, несущий информацию об угловом рассогласовании. Определение знака разности (направления вращения) обеспечивается путем сравнения чисел, при этом если А≅В, то на выходе
уровня "1" означает, что выполняемая операция производится с активными напряжениями высокого уровня. На входы А0, А1, А2, А3 подается управляющий многоразрядный двоичный код от внешнего устройства (слово А), на входы В0, В1, В2, В3 подается информация с датчика 4 угла в виде параллельного многоразрядного двоичного кода (слово В), В результате выполнения операции А-В-1 на выходах F0, F1, F2, F3 появляется результат операции в виде многоразрядного двоичного кода, несущий информацию об угловом рассогласовании. Определение знака разности (направления вращения) обеспечивается путем сравнения чисел, при этом если А≅В, то на выходе  формируется уровень "1", если A > B, на выходе
формируется уровень "1", если A > B, на выходе  формируется уровень "0". Если входные слова А и В равны, на выходе А В появляется напряжение низкого уровня сигнал о равенстве двух поданных кодов.
формируется уровень "0". Если входные слова А и В равны, на выходе А В появляется напряжение низкого уровня сигнал о равенстве двух поданных кодов.
Блок 6 реализован на микросхемах 565ЛЕ5 (элементы 11-13) и 564ЛА7 (элемент 14). На его выходе формируется уровень "1" только в том случае, если результат операции А-В-1 в блоке 5 станет "0000" и на всех выходах F0, F1, F2 и F3 появятся сигналы низкого уровня. Появление этого сигнала означает, что рассогласование кодов А и В составляет единицу младшего разряда (младшие разряды А0 и В0 соответственно), причем А > B.
Блок 7 реализован на микросхемах 564ЛЕ5 (элемент 15), 564ЛА7 (элемент 16), 564ЛА8 (элемент 17). На его выходе формируется уровень "1" только в том случае, если результат операции А-В-1 в блоке 5 станет F0 0, F1 1, F2 1, F3 1. Появление этого сигнала означает, что рассогласование кодов А и В также составляет единицу младшего разряда, но при А < B.
Элемент ИЛИ 8 реализован на микросхеме 564ЛЕ5, и на его выходе формируется уровень "0", когда на одном из его входов появляется уровень "1" с выхода блока 6 или 7.
Уровень "0" с выхода элемента ИЛИ 8 поступает на вход блока 9, представляющего собой запускаемый генератор импульсов регулируемой скважности. На входе блока стоит фильтр (элементы 18 и 19, резистор С2-23-10 кОм, конденсатор К10-17-0,1 мкФ), который защищает устройство от ложных срабатываний в момент смены кодов на выходах блока 5. Поступающий входной сигнал инвертируется на элементе 20 (микросхема 564ЛЕ5) и вызывает срабатывание одновибратора на элементах 21 (микросхема 564ТМ2), 22 (конденсатор К10-17-2 мкФ), 23 (резистор С2-23-56 кОм), 24 (диод 2Д510А). В течение времени срабатывания одновибратора, величина которого составляет Тт 0,66˙R23˙C22, происходит разрешение включения режима торможения, после чего формируется импульс, досылающий электродвигатель в заданную зону позиционирования. Досылающий импульс формируется на одновибраторе на элементах 25 (микросхема 564ТМ2), 26 (резистор С2-23-30 кОм), 27 (конденсатор К10-А-1 мкФ), 28 (диод 2Д510А). Длительность досылающего импульса определяется из соотношения Тд 0,66˙R26˙C27.
Импульсы периодического включения режима торможения с выхода блока 9 или сигнал с выхода блока 5 о равенстве кодов управления и кодов с датчика угла подаются на соответствующие входы элемента ИЛИ 10 на микросхеме 564ЛА7.
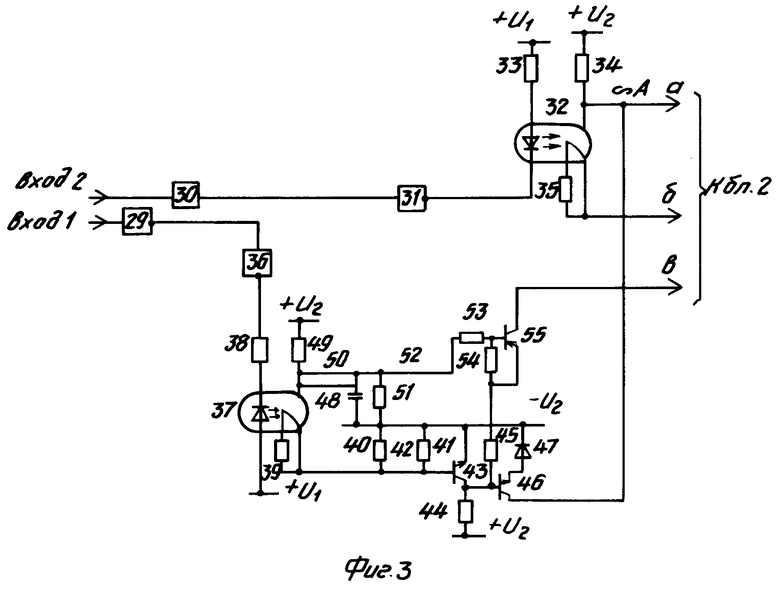
Возможная реализация устройства 1 приведена на фиг.3. При отсутствии сигнала включения режима торможения с выхода элемента ИЛИ 10 (уровень "0"), который поступает на вход элемента 29 (микросхема 564ЛН2), сигнал о знаке разности кодов управления с выхода блока 5 поступает на вход элемента 30 (микросхема 564ПУ4), а затем через элемент 31 (микросхема 155ЛН1), усиливающий сигнал по току, на вход оптопары 32 (30Т110Б). В зависимости от уровня поданного напряжения происходит включение или выключение светодиода оптопары 32. Элемент 33 (резистор С2-23-330 Ом) ограничивает максимальный ток через светодиод оптопары. Включение или выключение светодиода оптопары приводит к открыванию или закрыванию фототранзистора, через который течет или не течет ток, величина которого ограничена резистором 34 (1,6 кОм), Резистор 35 (130 кОм) определяет время включения и выключения элемента 32. Если фототранзистор элемента 32 закрыт, ток от +U2 через резистор 34 запитывает диагональ мостового инвертора, обеспечивающую вращение электродвигателя в одну сторону. Если фототранзистор открыт, то весь ток от +U2 через резистор 34, открытый элемент 32 запитывает другую диагональ мостового инвертора, обеспечивая тем самым вращение электродвигателя в другую сторону.
Сигнал включения режима торможения (уровень "1") подается через элемент 29 и элемент 36 (микросхема 155ЛН1), усиливающие сигнал по току, на вход элемента 37 (оптопары 30Т110Б). Этот сигнал выключает светодиод оптопары (в исходный момент через него течет ток, величина которого ограничена резистором 38 (330 Ом)).
Время включения и выключения фототранзистора оптопары задается резистором 39 (130 кОм). После закрывания фототранзистора закрывается ключ на резисторах 40 и 41, стабилитроне 42 (2С456А) и транзисторе 43 (2Т312Б), открывая тем самым ключ на резисторах 44 и 45, транзисторе 46 (2Т630Б) и диоде 47 (2Д510А). Открывание транзистора 46 приводит к тому, что потенциал в (˙) А становится близким к нулевому и ток от шины +U2 через резистор 34, транзистор 46 и диод 47 течет на шину U2, обесточивая тем самым обе диагонали мостового инвертора независимо от того, открыт или закрыт фототранзистор оптопары 32. Это означает, что все транзисторы мостового инвертора предварительно закрываются. Время, необходимое на предварительное закрывание транзисторов мостового инвертора, регулируется подбором величины конденсатора 48, после заряда которого через резистор 49 происходит срабатывание ключа на элементах 50 (диод 2Д510А), резисторе 51, стабилитроне 52 (два последовательно включенных стабилитрона 2С456А), резисторах 53 и 54 и транзисторе 55 (2Т630Б). Открывание транзистора 55 приводит к открыванию верхних транзисторов мостового инвертора и включает режим динамического торможения. В момент начала движения режим торможения снимается сигналом "0" с выхода элемента ИЛИ 10.
Этот сигнал проходит через элементы 29, 36 и вызывает открывание фототранзистора элемента 37. Поскольку порог срабатывания у стабилитрона 52 больше, чем у стабилитрона 42, то на аноде диода 50 устанавливается напряжение меньшее, чем на катоде, в результате чего он закрывается. Из-за отсутствия соответствующего тока базы закрывается транзистор 55. В результате все транзисторы мостового инвертора заперты. Через открытый фототранзистор элемента 37 происходит одновременно разряд емкости 49 и переключение транзисторов 43 и 46. При этом транзистор 43 открывается, а транзистор 46 закрывается. Таким образом в (˙) А снимается блокирующее напряжение и происходит включение соответствующей диагонали мостового инвертора.
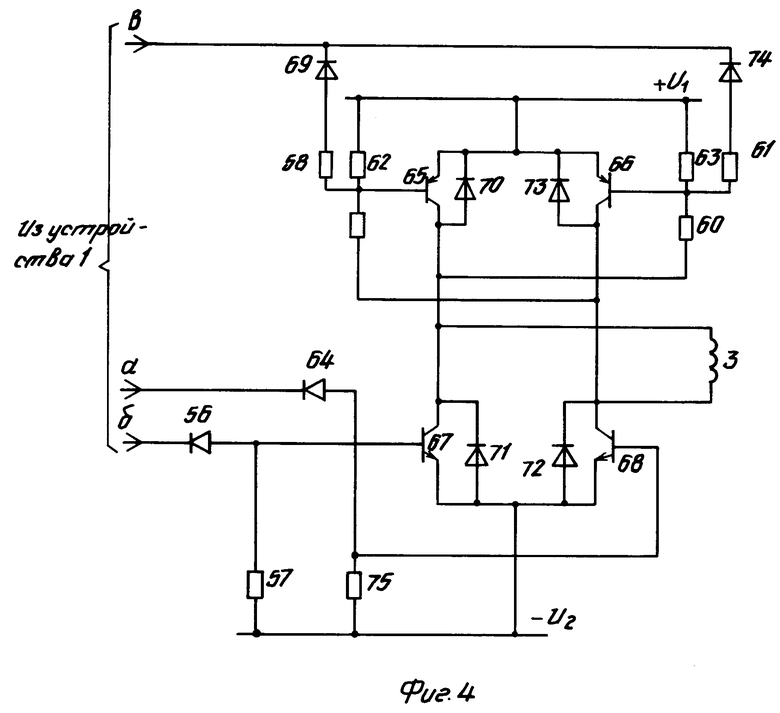
Возможная реализация мостового инвертора 2 приведена на фиг.4, где элемент 56 стабилитрон 2С456А, элементы 57-61 резисторы 470 Ом, элементы 62 и 63 резисторы 330 Ом, элемент 64 стабилитрон 2С456А, элементы 65 и 66 транзисторы 2Т825А, элементы 67 и 68 транзисторы 2Т827А, элементы 69-74 диоды 2Д213А. На фиг.4 также показано подключение обмотки якоря электродвигателя к мостовому инвертору.
Если в (˙) А (фиг.3) отсутствует блокирующее напряжение и элемент 32 закрыт, ток через элемент 64 открывает элемент 68, который, в свою очередь, током через резистор 59 открывает элемент 65. Ток через обмотку электродвигателя течет по цепи: +U элемент 65 обмотка электродвигателя элемент 68 -U, обеспечивая тем самым вращение электродвигателя по часовой стрелке.
Если блокирующее напряжение в (˙) А отсутствует и отрон 32 открыт, то в (˙) А устанавливается напряжение, величина которого близка к напряжению стабилизации элемента 56. Этим напряжением закрывается элемент 64, и транзисторы 65 и 68 закрываются токами утечки через элементы 62 и 75. В свою очередь, ток через элемент 56 открывает транзистор 67, который через резистор 60 формирует ток базы, открывающий транзистор 66. Ток через обмотку якоря течет по цепи: +U элемент 66 обмотка электродвигателя элемент 67 -U, вращая тем самым электродвигатель против часовой стрелки.
Подача блокирующего напряжения в (˙) А закрывает одновременно элементы 56 и 64 и все транзисторы мостового инвертора закрываются токами утечки через соответствующие резисторы 62, 63, 57, 75.
Включение режима динамического торможения осуществляется путем открывания транзисторов 65 и 66. Их открывание обеспечивается при срабатывании транзистора 55 (фиг. 3), подключенного коллектором к катодам диодов 69 и 74. Через элементы 55, 58, 69 течет ток базы транзистора 65, через элементы 55, 74, 61 течет ток базы транзистора 66. Динамическое торможение осуществляется за счет ЭДС самоиндукции, накопленной в обмотке якоря электродвигателя. Причем величина ЭДС самоиндукции (а следовательно, и величина тормозящего момента) прямо пропорциональна величине скорости вращения вала электродвигателя. Это означает, что для получения максимального тормозящего момента за счет ЭДС самоиндукции необходимо, чтобы динамическое торможение, т.е. замыкание обмотки якоря на себя, происходило сразу после снятия напряжения питания (закрывания транзисторов мостового инвертора), когда скорость вращения вала электродвигателя максимальна, и величина тормозящего момента может в этом случае достигнуть 90% от номинального момента нагрузки.
Как показывает анализ работы цифровой следящей системы прототипа, постепенный набор скорости при разгоне электродвигателя и последовательный сброс скорости от максимального значения до нуля приводят не только к увеличению времени на отработку необходимого углового рассогласования, но и к значительным потерям мощности, поскольку при таком режиме работы мощность ЭДС самоиндукции не используется в полной мере для создания тормозящего момента. Более того часть этой энергии необходимо при этом рассеивать на мощных транзисторах мостового инвертора.
В предлагаемой системе выключение транзисторов мостового инвертора, т.е. снятие напряжения питания с обмотки якоря электродвигателя, и включение динамического торможения за счет открывания верхних транзисторов мостового инвертора происходят практически одновременно, что позволяет наиболее полно использовать энергию ЭДС самоиндукции для торможения электродвигателя. При этом в зависимости от направления вращения вала электродвигателя ток от ЭДС самоиндукции в одном случае течет по цепи обмотка якоря электродвигателя элемент 70 элемент 66 обмотка якоря электродвигателя. При вращении вала электродвигателя в другую сторону замыкание обмотки его якоря на себя обеспечивается через элементы 73 и 65.
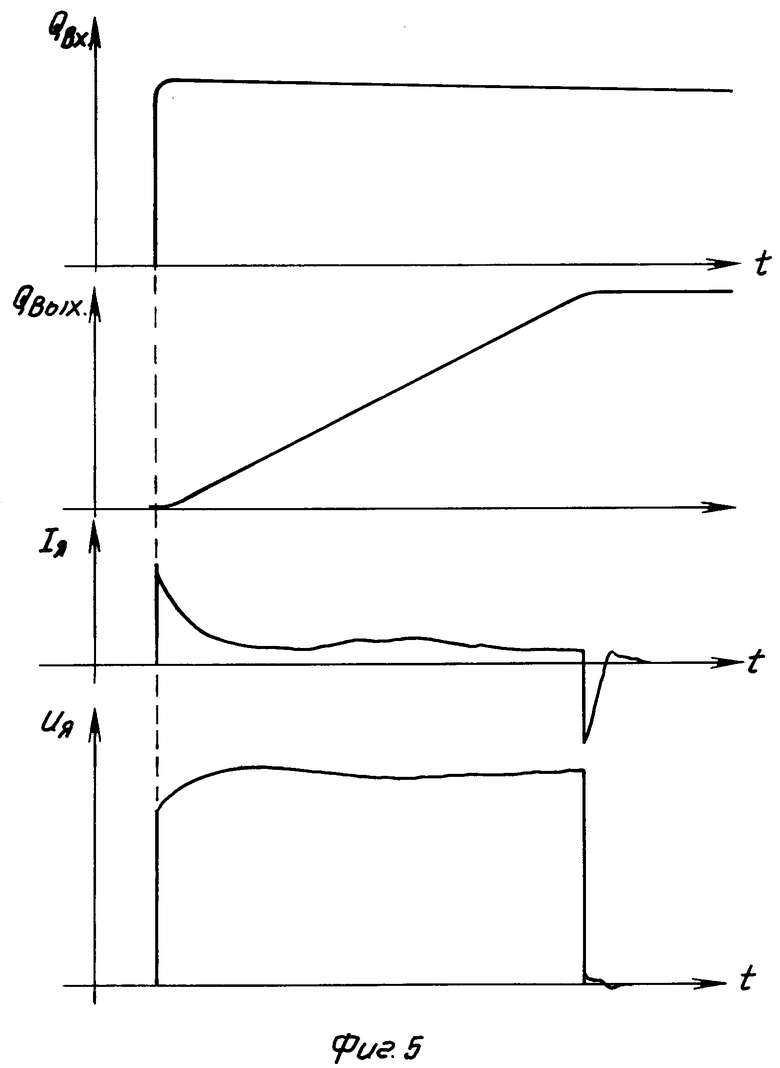
На фиг.5 приведена осциллограмма, полученная при отработке электродвигателем управляющего кода в виде "ступеньки", Осциллограмма θвх получена с выхода цифроаналогового преобразователя и характеризует отрабатываемое угловое рассогласование, θвых телеметрическая информация с потенциометра на валу электродвигателя, Iя ток якоря, Uя напряжение на обмотке якоря электродвигателя.
На фиг.6 приведена осциллограмма, полученная при отработке электродвигателем убывающей последовательности кодовых комбинаций. Как видно из осциллограммы, отработка сигнала типа "ступенька" обеспечивается в предлагаемом техническом решении с максимальным быстродействием, что обеспечено главным образом за счет наиболее эффективного использования режима динамического торможения от ЭДС самоиндукции, а также за счет того, что при разгоне к обмотке якоря сразу прикладывается напряжение питания. Характер переходного процесса апериодический без колебательности и перерегулирования. Отработка линейно меняющегося кода управления осуществляется с высокой точностью повторения.
Использование режима динамического торможения позволяет также уменьшить потери мощности в предлагаемой системе по сравнению с прототипом.
Таким образом, предлагаемая цифровая следящая система обеспечивает максимальное быстродействие при отработке "ступенчатого" воздействия, при этом потери мощности сведены к минимуму и обусловлены потерями на полупроводниковых элементах, работающих в ключевом режиме.
Предлагаемая система имеет в отличие от прототипа один управляющий вход и не имеет цепей синхронизации, что делает ее помехоустойчивой, а также позволяет снизить габариты и стоимость за счет использования элементной базы средней степени интеграции.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР ДЛЯ ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2039897C1 |
| ДЕШИФРАТОР | 1990 |
|
RU2007030C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ДВУХПРОВОДНОЙ ЛИНИИ СВЯЗИ | 1991 |
|
RU2022369C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ | 1991 |
|
RU2011062C1 |
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2006431C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ПЛАНЕТУ | 1991 |
|
RU2021173C1 |
| ИЗМЕРИТЕЛЬ УГЛА ОТКЛОНЕНИЯ ОСИ КОСМИЧЕСКОГО АППАРАТА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1993 |
|
RU2020412C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1993 |
|
RU2095295C1 |
Изобретение позволяет повысить быстродействие цифровой следящей системы, в которой в качестве исполнительного органа используется электродвигатель постоянного тока. При этом торможение электродвигателя осуществляется за счет ЭДС самоиндукции без перерегулирования и колебательных процессов в системе. В блоке 5 определения направления вращения и углового рассогласования происходит сравнение кодов управления от внешней ЭВМ и обратной связи с цифрового датчика 4. На выходах блока 5 происходит формирование сигнала разности поданных кодов, по знаку которого определяется направление вращения вала исполнительного электродвигателя 3, а также разностный код, по которому определяется момент включения режима торможения. В результате первый тормозящий импульс в системе формируется до совпадения кодов управления и обратной связи. 6 ил.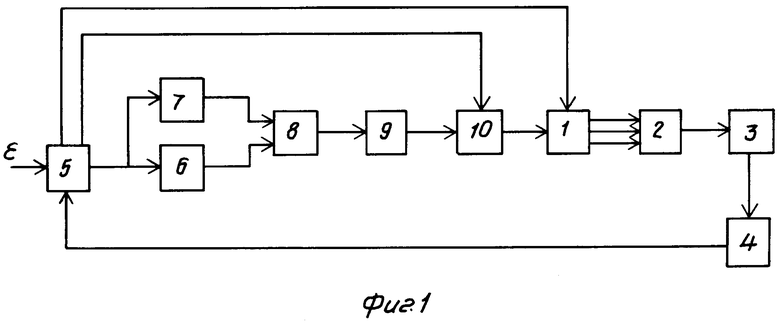
ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА, содержащая устройство выборки групп ключей мостового инвертора, соединенное через мостовой инвертор с входом исполнительного электродвигателя, выход которого соединен с входом цифрового датчика угла, отличающаяся тем, что в нее введены блок определения направления вращения и углового рассогласования, первый и второй блоки разрешения включения режима торможения, первый и второй элементы ИЛИ и блок переодического включения режима торможения, при этом выход цифрового датчика угла соединен с первым входом блока определения направления вращения и углового рассогласования, первый выход которого соединен с входами первого и второго блоков разрешения включения режима торможения, выходы которых через первый элемент ИЛИ соединены с входом блока периодического включения режима торможения, выход которого соединен с первым входом второго элемента ИЛИ, второй вход которого соединен с вторым выходом блока определения направления вращения и углового рассогласования, а выход с первым входом устройства выборки групп ключей мостового инвертора, второй вход которого соединен с третьим выходом блока определения направления вращения и углового рассогласования, второй вход которого является информационным входом цифровой следящей системы.
| Цифровая следящая система управления | 1979 |
|
SU969109A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
