3
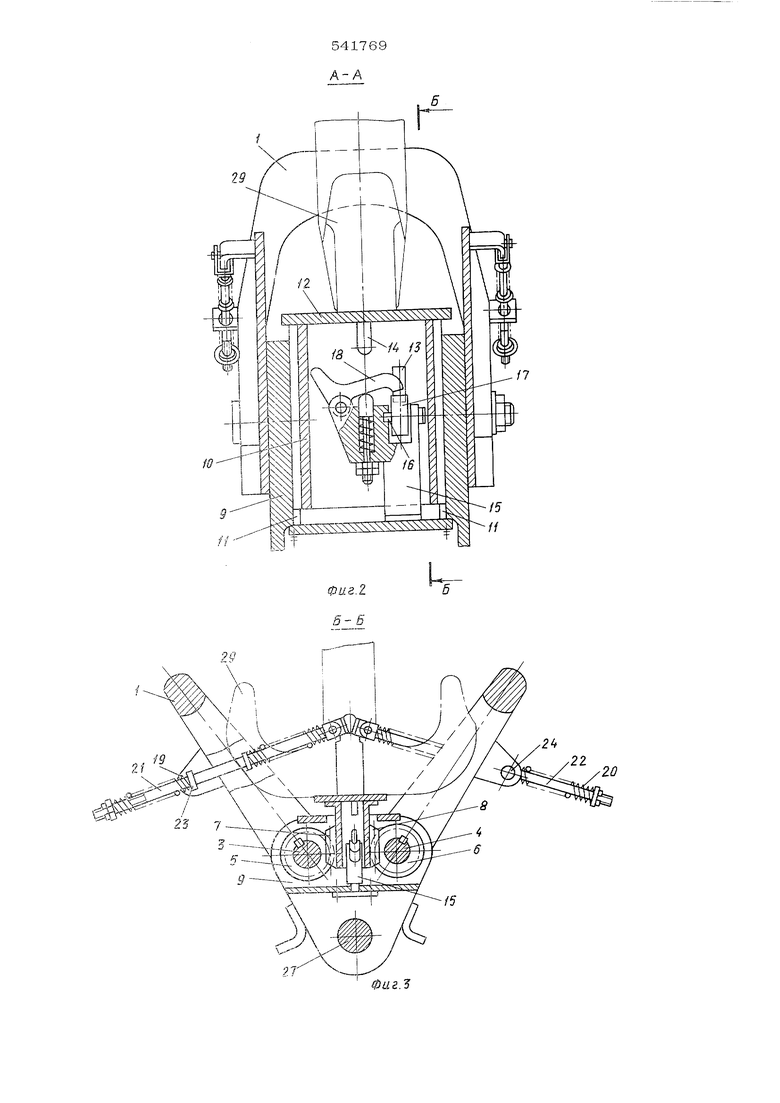
чажок 18, благодаря кратности плеч которого сведены к вертик-Эльное перемещение стойки для разворота звездочки 17 и связанный с этим поворот серьги 1 и серьги 2.
Звездочка 17, рычажок 18 в кол/тпекте с выступом 13 и упором 14 образуют фиксатор рабочего положения стойгки 10,
Таким образом, стойка 10 через плиту 1 2 контактирует с крюком грузаподъемпой
машины, а через выступ 13 и упэр 14
с фиксатором рабочего положения.
Пружины 19 и 20 на тягах 21 и 22 через шарнирные оси,2,3 и 24 частично уравновеш,ивают момент, создаваемый серь гами 1 и 2 Б раскрытом положении на ося 3 и 4. Пружины .25 и 26 создают усилия, необходимые для вывода кз равновесия серги 1 и серьги 2 (разводят :;:х) из положения максимального их сблрзкения на крюк
Шарнир 27 служит для соединения устройства с верхним шарниром лшешей или с другой оснасткой, а опорные листы 28 для устойчивого иопожения устройства ка клепшх.
Устройство работает следующим обра зом.
В исходном положении И|;1испособление для навешивания захваттгого ; стройства на двурогий крюк размешено HEL стенде: серьг
Iи 2 в раскрытом положении 1„ стойка
10в своем верхт- ем положении, звездочка 17 своей большой осью располоясена вертикально.
Двурогий крюк 29 грузоподъемной маидины опускается на плиту 12 рогами к одной и другой серьге. Своим вЛ;ом крюк давит через плиту 12 на стойку 10, которая, перемешаясь вниз по направляюшим
IIтраверсы 9 через рейки 7 и В, шестерни 5 и 6, оси 3 и 4 поворачивает серьги
1 и 2 навстречу Другу в положенке
11над крюком. При этом сила пружин 1 9 и 20 должна компенсировать разншду момеи-тов на осях 3 и 4, создаваемы./; весом серьги 1 и 2 и моментом, развиваемым весом крюка 29.
Сила пружин 25 и 26 должна преодолеваться моментом, разв-иваемым крюком, и в то же время доля-сна бь:ть достаточной для вывода серьги 1 и 2 из состояния равновесия.
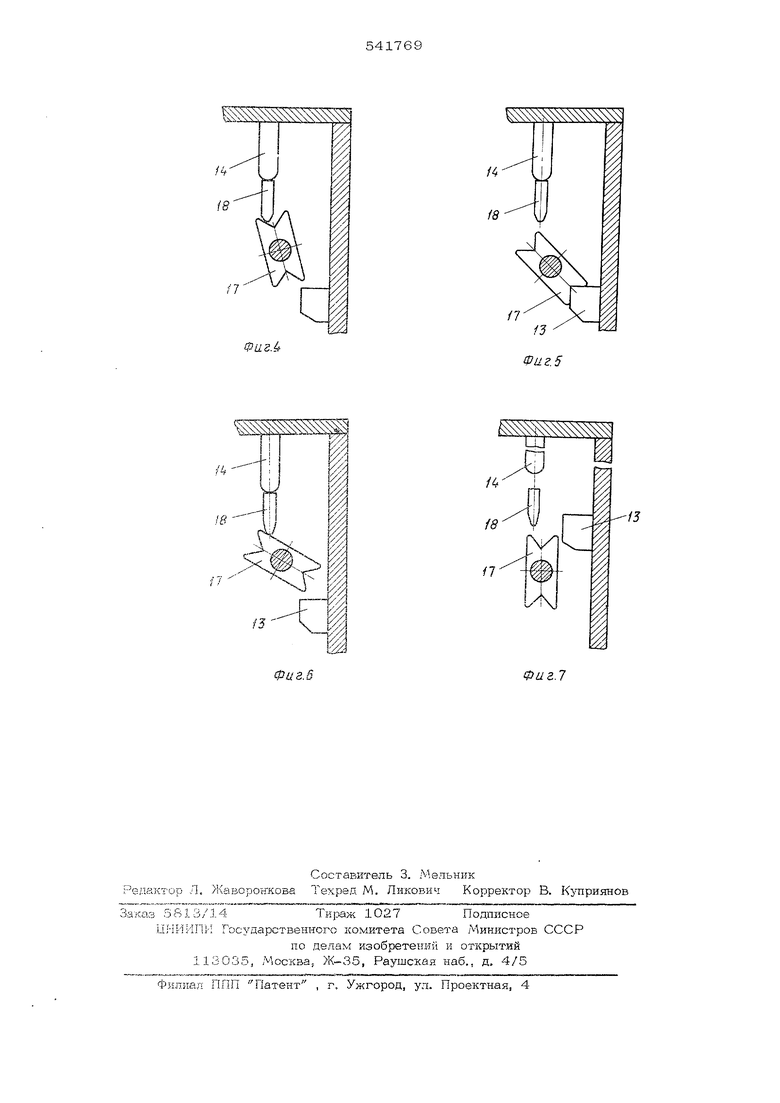
При двилсении стойки 10 вниз таор 14 нажимает на рычажок 18. который, лово- рачиваясь своей оси, сЕюбодным концом нажимает на скос в.ерхнего левого зуба звездочки 17; поворачивает ее па некоторый угол. При этом звездочзс.а 17 своим нижним правым зубом оказывается
4
над 13, стойка 10 находится в своем нижнем положении, плита 12 стойки опирается на верхнюю часть траверсы 9.
После достижения нижнего положения плЕты 12 крюк 29 грузоподъемной машины поднимается. Серьги 1 и 2 отжимаются прзжинами 25 и 26, поворачивают оси 3 и 4 через шестерни 5 и 6, рейки 7 и 8 поднимают стойку 10 вслед за крюком до упора выступа 14 в нижние зубья звездочки. Дальнейший подъем стойки, а спедовательно поворот осей 3 и 4 становится невозможным. Вместе с осями 3 и 4 останавливаются и серьги 1 и 2 в положении Hi. над зева:у5и правого и левого крюка 29. 29 при дальнейшем подъеме открывается от 12 н входит в зацеппение с серьгами 1 и 2.
хВтоматЕческоо наве:и1ивание захватного устройства на двурогий крюк грузоподъемной ма:11лаъ1 произЕ.едено.
.Для снятия захватного устройства с крюка необхо,цимо его установить на стенд. Крюк опускается до упора в плиту 12 и вместе с ней под действием веса крюка в ее нижнее положение до упора в траверсу 9. При этом движется вниз стойка 10 и через рейюг 7 п Sj шестерни 5 и 6 оси 3 ;) 4 поворачивают серьги 1 и 2 в положение и , сжимая пружины 25 и 26. При д.виженки стойки 10 вниз выступ 14 нажимает ка рычажок 18. который свободным плечом дав.ит на верхний правый зуб звез5дочки 17, ра.зворачивая ее к концу хода стойки в горизонта.льное положение.
После .достижения плитой 12 своего нижнего положения крюк поднимается. Под действием пружив: 25 и 26 серьги 1 и 2 отктон.яются в стороны, выводятся из равновесиЯ; поворачивают оси 3 и 4 и через шестерни 5, 6, рейки 7 и 8 поднимают стойку 10 в верхнее положение, которое
соответствует положению 1. 1
движении стойки 10 вверх выступ
13 разворачивает звездочку 17 из горизонтального в вертикальное положение. Крюк 29 получает свободу выхода. Автоматическое снятие устройства с двурогого крюка произведено.
Формула изобретения
Приспособление для навешивания захватного устройства на двурогий крюк крана, содержашее .корпус и серьги, закрепленные посредством осей на захватном устройстве, о т л и ч а ю ш е е с я тем, что, с
цепью автоматизации процесса навешивания захватного устройства, оно снабжено стойкой, подвижно установленной в корпусе, на которой укреплены зубчатые рейки, взаимодействующие с шестернями, установленными на осях, и фиксатором рабочего положения, состоящим из рычажка и звездочки с выступом, контактирующими с упором, укрепленным на стойке, а серьги посредством подпружиненных тяг соединены с корпусом.
Источники информации, принятые во внимание при экспертизе:
1.Авт. св. СССР № 179870, кл. В 66 С 1/38, 1964.
2.Рякин А. И., Урванцев Б. А. Строповка грузов г М., 1968, стр. 157,
рис. 107.


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАВЕШИВАНИЯ ГРУЗА НА ДВУРОГИЙ КРЮК КРАНА | 1990 |
|
RU2034768C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАВЕШИВАНИЯ ГРУЗА НА ДВУРОГИЙ КРЮК КРАНА | 2007 |
|
RU2335448C1 |
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |
| Захватное устройство | 1988 |
|
SU1581677A1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |
| Механизм фиксации грузозахватного устройства | 1982 |
|
SU1054276A1 |
| Захватное устройство | 1985 |
|
SU1402536A1 |
| Захват-кантователь | 1982 |
|
SU1031867A1 |
| Устройство для перемещения вагонных тележек | 1989 |
|
SU1794735A1 |
| ПОВОРОТНАЯ ГОЛОВКА ЗАХВАТНОГО УСТРОЙСТВА ДЛЯ ГРУЗОВ | 1995 |
|
RU2148549C1 |
22 Фuг.f 20
29
Фи.г.2. Б- Б
Фаг.
/5
Фиг.6
-/5
rvl
AJ
Фиг.1
