Изобретение относится к области перегрузки грузов с помощью грузозахватных устройств, используемых совместно с грузоподъемными машинами для подъема, опускания и перемещения грузов, в частности с помощью устройств на постоянных магнитах, и предназначено для перегрузки диамагнитных грузов.
Известен способ транспортирования и перегрузки, например, контейнеров ИСО, заключающийся в том, что на контейнер устанавливают cпредеры, фиксируют их в фитингах, а перегрузку и перевозку осуществляют грузоподъемными средствами.
Недостатком указанного способа является его огpаниченная универсальность. Например, в условиях необорудованного берега после установки и фиксации спредера на контейнере невозможно осуществить вертолетом в полете направленное автоматическое наведение захвата на геометрический центр спредера вследствие его колебаний на весу и значительных потоков воздуха от его движителя в зоне работы. Особенно возрастают неблагоприятные факторы под воздействием окружающей среды в районах Крайнего Севера, где осуществляется выгрузка контейнеров из судов на рейдах на необорудованный берег.
Известен способ транспортировки и перегрузки грузов в пакетах, состоящий в том, что на средство укрупнения, оснащенное центральной вертикальной стойкой с воронкой на верхнем конце, устанавливают группы пакетов, нацеливают к грузоподъемному средству на канатах захват, на воронку, вводят его внутрь воронки, автоматически фиксируют и перегружают средство укрупнения с грузом, затем автоматически извлекают захват из воронки.
Недостатком такого способа являются его ограниченная универсальность (по перечисленным выше причинам, присущим спредеру) и недостаточная производительность погрузоразгрузочных работ в связи с необходимостью механического наведения захвата на воронку.
Известны способ и устройство для перегрузки грузов грузоподъемными машинами c навешенными на них захватами на постоянных магнитах, которые в исходном немагнитном состоянии накладывают на ферромагнитные грузы, затем придают захвату магнитные свойства, захватывают груз, перемещают его и укладывают, после чего придают захвату немагнитные свойства и освобождают груз (приняты в качестве прототипа).
Недостатки этих способа и устройства являются возможность перегрузки только ферромагнитных грузов и недостаточная производительность вследствие отсутствия возможности центровки захвата относительно груза.
Цель изобретения расширение технологических возможностей и повышение производительности путем обеспечения перегрузки любых грузов и исключения механической наводки захвата на груз.
Поставленная цель достигается тем, что перед наведением на груз захвата на его катушку управления магнитом подают импульс тока, затем наводят его на магнит, встроенный в грузонесущее средство, после чего груз транспортируют.
Устройство для осуществления предлагаемого способа, включающее грузозахватный орган в виде магнитного захвата, имеющего перемагничиваемый и неперемагничиваемый магниты, а также катушку управления захватом, согласно изобретению дополнительно содержит грузонесущее средство, например спредер, со встроенными в него магнитами, расположенными симметрично относительно его вертикальной оси.
Предлагаемый способ перегрузки диамагнитных грузов обеспечивает автоматическое наведение захвата на грузонесущее средство, захват груза и его транспортировку посредством магнитного захвата, что расширяет технологические возможности способа и повышает производительность перегрузочных работ.
Наличие в устройстве грузонесущего средства со встроенными в него постоянными магнитами позволяет в результате взаимодействия магнитных полей, создаваемых захватом и встроенными в грузонесущее средство магнитами, обеспечить автоматическое наведение, правильную ориентацию, стыковку с грузонесущим устройством и надежную транспортировку, тем самым расширяются технологические возможности захвата, повышается производительность работ.
Указанные признаки способа и устройства отличают предлагаемые технические решения от прототипа, т. е. они соответствуют критерию изобретения "новизна".
При просмотре патентной и научно-технической литературы не обнаружены объекты, содержащие признаки, отличающие заявляемые объекты от прототипа, ввиду чего они соответствуют критерию изобретения "существенные отличия".
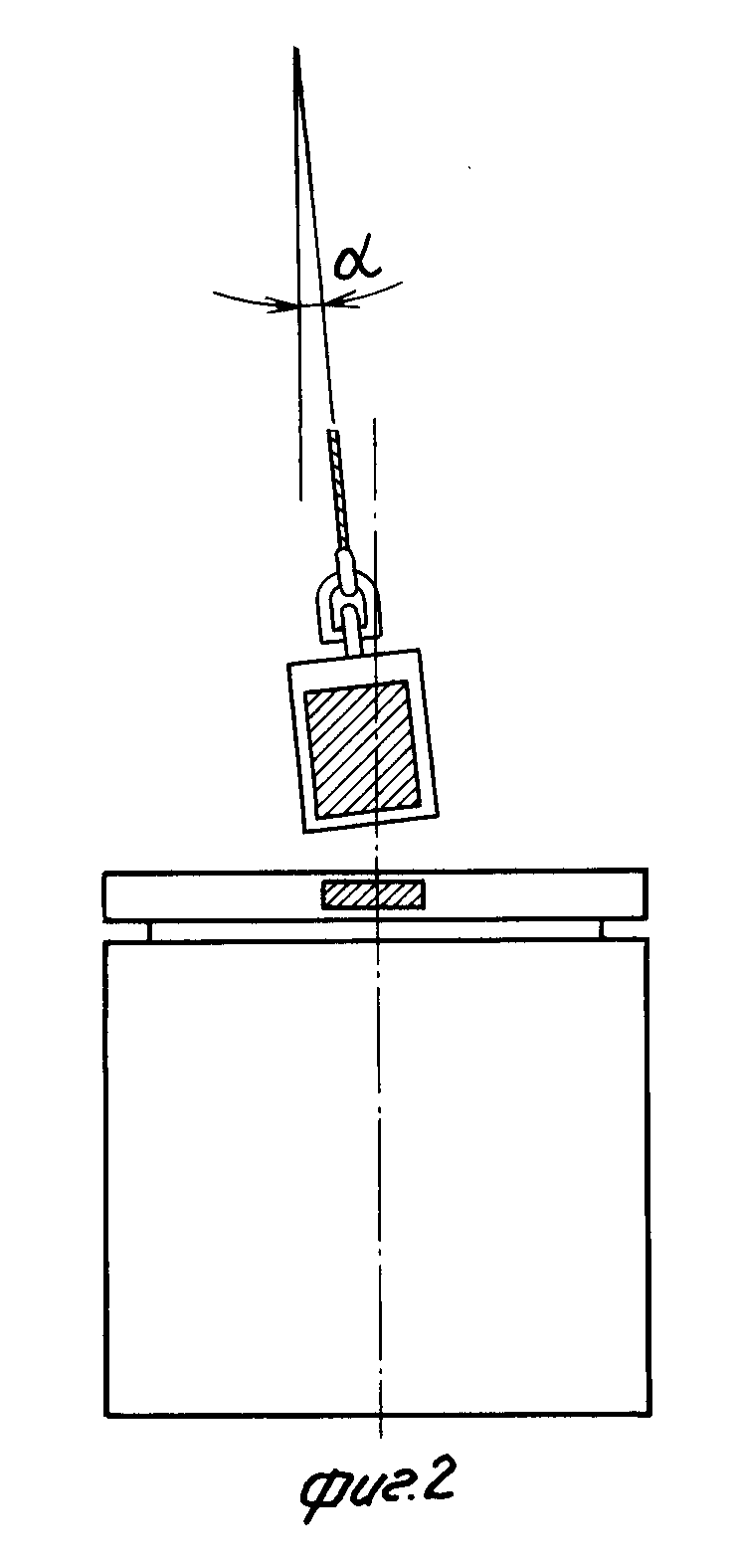
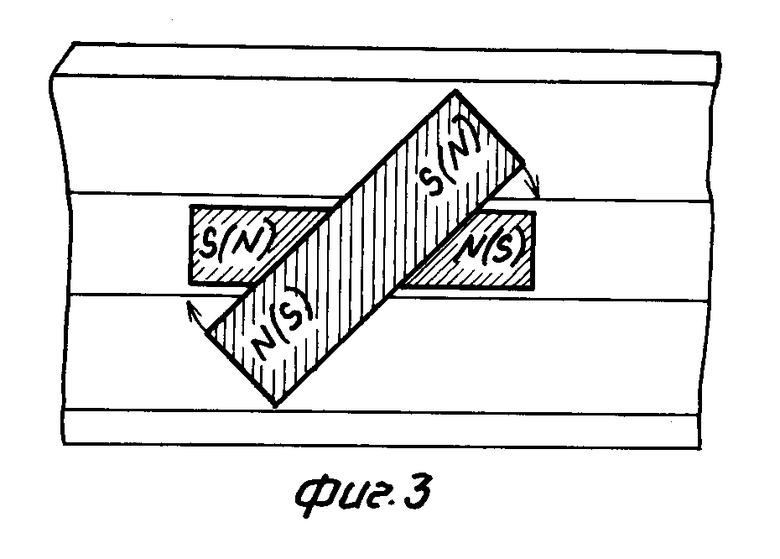
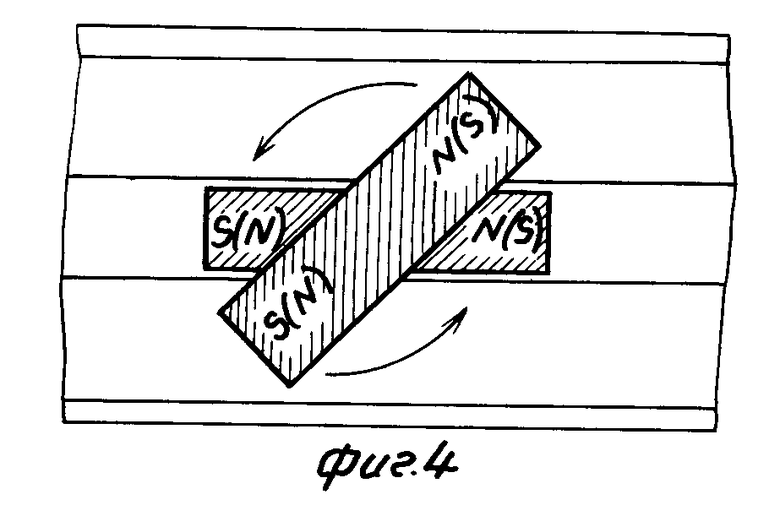
Изобретение поясняется чертежами, где на фиг.1 представлен пример реализации способа при перегрузке контейнера, а также предлагаемое устройство; на фиг. 2 сближение и центровка магнитного захвата и грузонесущего средства; на фиг.3 и 4 ориентация захвата в результате взаимодействия полюсов магнитов.
Устройство для перегрузки диамагнитных грузов включает грузозахватный орган в виде постоянного магнита (далее захват) 1, подвешиваемого на гибкой подвеске 2. Захват 1 имеет катушку управления 3, перемагничиваемый магнит 4 и неперемагничиваемый магнит 5. Устройство дополнительно содержит грузонесущее средство (спредер) 6, выполненный, например, из диамагнитного материала со встроенными в него магнитами 7. Позицией 8 обозначен груз (контейнер).
Работа устройства и способ заключаются в следующем.
Захват 1 подвешивают на гибкой подвеске 2 к подъемному средству. Через катушку управления 3 пропускают импульс тока, тем самым сообщая захвату 1 магнитные свойства. Посредством грузоподъемного средства наводят захват 1 на груз 8 и начинают сближение с грузонесущим средством 6, причем благодаря взаимодействию магнитных полей захвата 1 и грузонесущего средства 6 процесс сближения, наведения и центровки захвата 1 относительно груза 8 автоматизируется и ускоряется. Дальнейшее автоматическое сближение захвата и грузонесущего средства приводит к их стыковке и захвату груза. Затем груз транспортируют, после чего подачей импульса обратной полярности освобождают груз.
Устройство может эффективно использоваться, например, в районах крайнего севера, где осуществляется выгрузка контейнеров из судов на необорудованный берег. При этом захват навешивается на вертолет, который в полете осуществляет строповку спредера, установленного на контейнере.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕГРУЗКИ КОНТЕЙНЕРОВ | 2018 |
|
RU2703365C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТЕЙ ОТ НАСЫПНЫХ ГРУЗОВ | 1992 |
|
RU2060911C1 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1992 |
|
RU2057055C1 |
| ПЛАВУЧИЙ НЕФТЕМУСОРОСБОРНИК | 1991 |
|
RU2066654C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОЗКИ И ПЕРЕГРУЗКИ СЫПУЧИХ ГРУЗОВ | 1990 |
|
RU2032602C1 |
| Поддон | 1990 |
|
SU1782222A3 |
| УСТРОЙСТВО ДЛЯ МОЙКИ ПОЛОТНА БОНОВЫХ ЗАГРАЖДЕНИЙ | 1991 |
|
RU2020004C1 |
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
| Устройство для перегрузки тяжеловесных грузов между судном и берегом | 1987 |
|
SU1631015A1 |
Использование: в области подъемно - транспортной техники. Сущность изобретения: перед наведением на груз захвата на постоянных магнитах на его катушку управления магнитом подают импульс тока, чем автоматически наводят его на магнит, встроенный в грузоподъемное средство, после чего груз транспортируют. Магниты в грузонесущем средстве расположены симметрично относительно его вертикальной оси. Захват 1 подвешивают на гибкой подвеске 2 к подъемному средству. Через катушку управления 3 пропускают импульс тока, тем самым сообщают захвату 1 магнитные свойства. Посредством грузоподъемного средства наводят захват 1 на груз 8 и начинают сближение с грузонесущим средством 6, причем благодаря взаимодействию магнитных полей захвата и грузонесущего средства процесс сближения, наведения и центровки захвата относительно груза автоматизируется и ускоряется. Дальнейшее автоматическое сближение захвата и грузонесущего средства приводит к их стыковке и захвату груза. Затем груз транспортируют, после чего подачей импульса обратной полярности освобождают груз. Положительный эффект: устройство может эффективно использоваться, например, в районах Крайнего Севера, где осуществляется выгрузка контейнеров из судов на необорудованный берег. При этом захват навешивается на вертолет, который в полете осуществляет строповку спредера, установленного на контейнере. 2 с. и 1 з.п. ф-лы, 4 ил.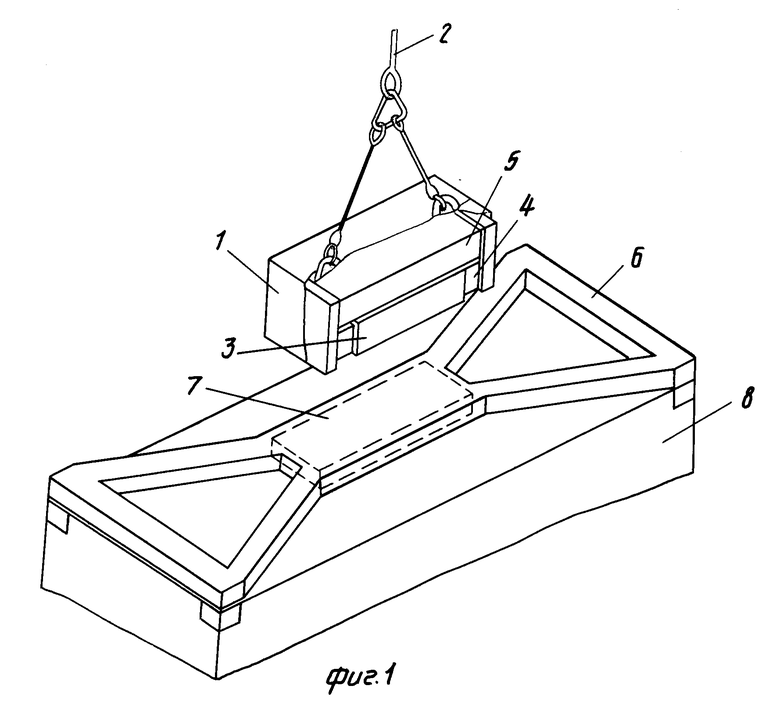
| Магнитный захват | 1982 |
|
SU1068366A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
