Изобретение относится к грузоподъемной технике и может быть использовано в различных отраслях промышленности.
Известен крановый захват для штучных грузов, содержащий подвесную раму, шарнирно закрепленные на ней захватные рычаги и механизм их фиксации, выполненный в виде взаимодействующих с каждым из рычагов и закрепленных на общей оси звездочки и кулачка, причем взаимодействующие с механизмом фиксации концы рычагов выполнены с расположенными на разной высоте и смещенными в горизонтальной плоскости упорами для взаимодействия соответственно с кулачком и со звездочкой (авт.св. СССР N 787336, кл. В 66 С 1/30).
Недостаток данного захвата заключается в сложности конструкции механизма фиксации и в высокой трудоемкости изготовления, что связано с необходимостью выдерживания высокой точности размеров при изготовлении. Кроме того, имеет место повышенный износ взаимодействующих деталей.
Известен механизм фиксации захватного устройства, содержащий закрепленный на несущей раме устройства корпус, взаимодействующий с корпусом с возможностью вертикального перемещения устройства ползун и размещенное внутри корпуса и ползуна фиксирующее приспособление, включающее в себя закрепленный на оси в ползуне поворотный рычаг с консольным цилиндрическим упором на нижнем конце, жестко закрепленный в корпусе копир, имеющий наклонные поверхности и расположенную снизу полукруглую выемку, и расположенную под копиром с зазором опору для фиксации цилиндрического упора рычага при нижнем положении ползуна (авт.св. СССР N 1074804, кл. В 66 С 1/42).
Недостаток данного фиксирующего механизма заключается в сложности конструкции.
Это устраняется тем, что в механизме фиксации грузозахватного устройства, содержащем закрепленный на несущей раме устройства вертикальный корпус, взаимодействующий с корпусом с возможностью вертикального перемещения устройства ползун и размещенное внутри корпуса и ползуна фиксирующее приспособление, включающее в себя закрепленный на оси в ползуне поворотный рычаг с консольным цилиндрическим упором на нижнем конце, жестко закрепленный в корпусе копир, имеющий наклонные поверхности и расположенную снизу полукруглую выемку, и расположенную под копиром с зазором опору для фиксации цилиндрического упора рычага при нижнем положении ползуна, верхнее плечо рычага подпружинено, копир выполнен клиновидным и наклонные поверхности расположены по бокам копира, в опора представляет собой вертикальную планку, размещенную с возможностью прохода цилиндрического упора рычага.
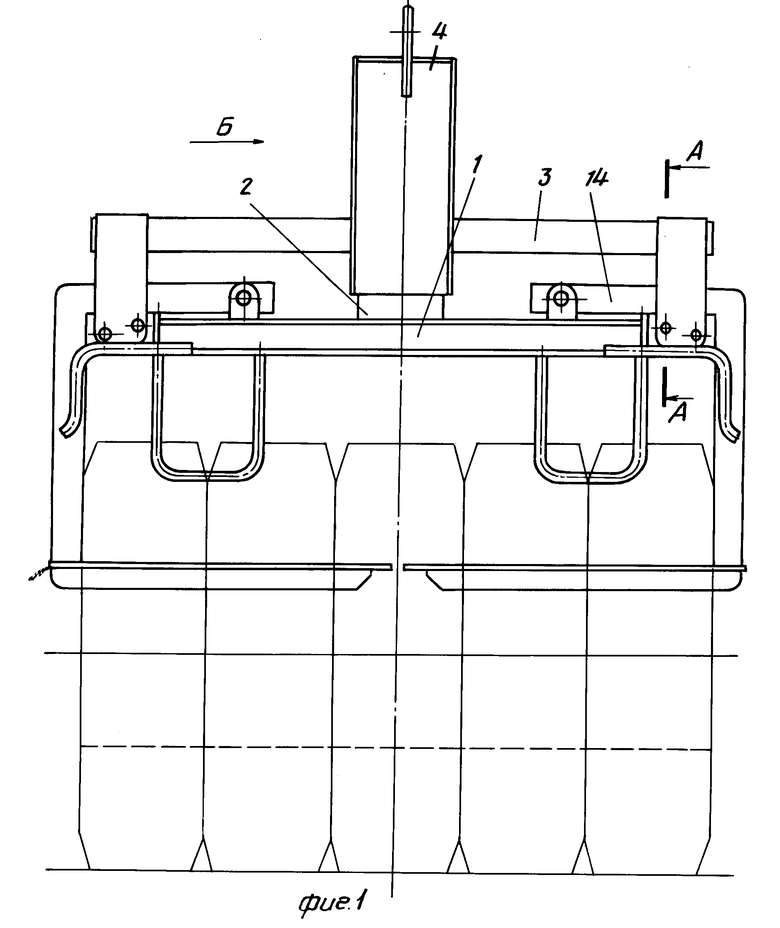
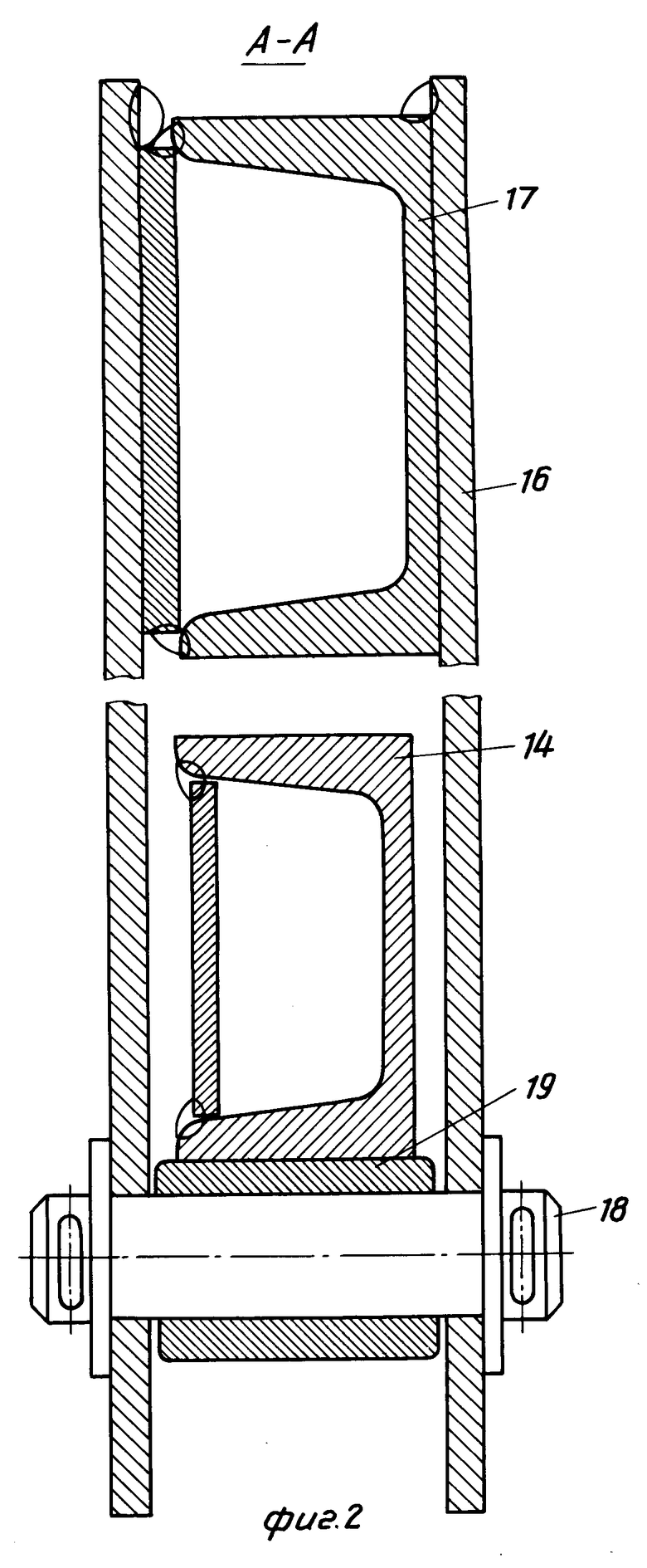
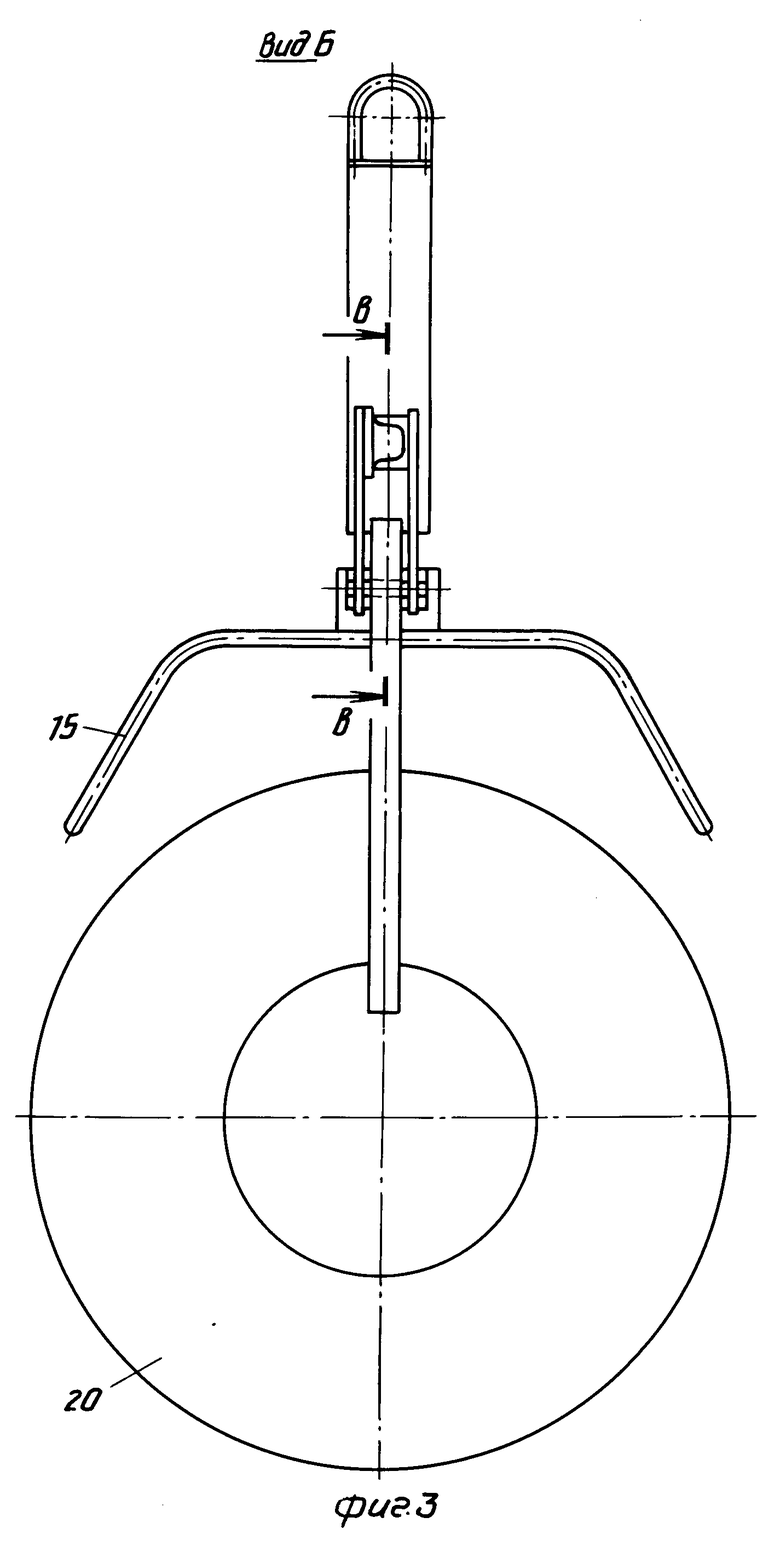
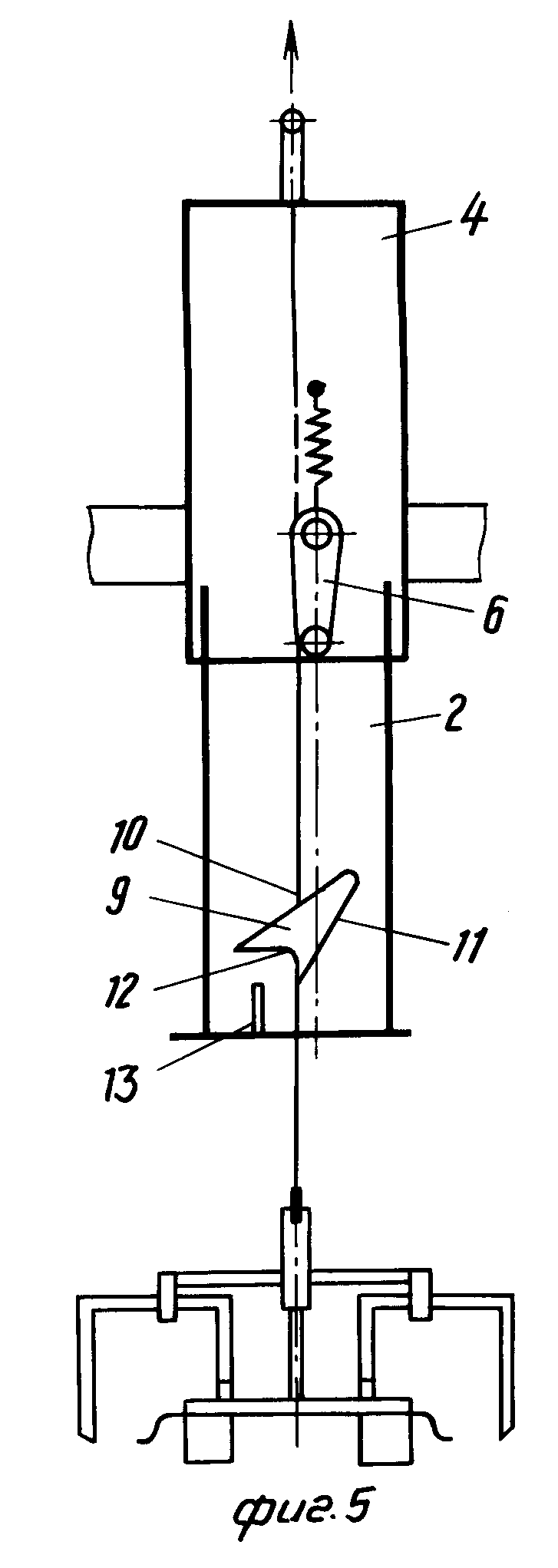
На фиг. 1 изображен общий вид предлагаемого механизма; на фиг.2 разрез А-А на фиг. 1; на фиг.3 вид по стрелке Б на фиг.1; на фиг.4 разрез В-В на фиг.3; на фиг.5, 6, 7 и 8 механизм фиксации в четырех различных положениях.
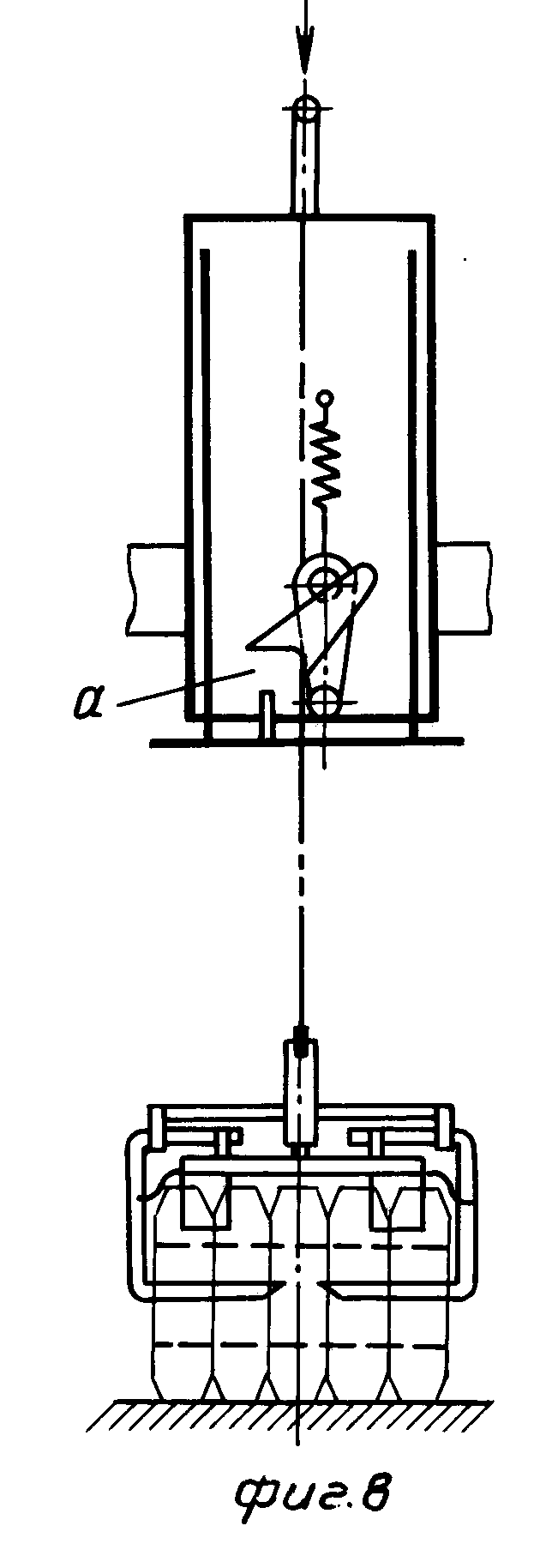
Механизм содержит закрепленный на несущей раме 1 грузозахватного устройства корпус 2, соединенный с траверсой 3 устройства ползун 4, взаимодействующий с корпусом 2 с возможностью вертикального перемещения, и помещенное внутри корпуса 2 и ползуна 4 фиксирующее приспособление, выполненное в виде установленного на оси 5 в ползуне 4 поворотного рычага 6, верхний конец которого подпружинен относительно ползуна 4 пружиной 7. Нижний конец рычага 6 снабжен консольным цилиндрическим упором 8, взаимодействующим с жестко закрепленным в корпусе 2 клиновидным копиром 9, имеющим наклонные боковые поверхности 10 и 11 и выполненную снизу полукруглую выемку 12. Под копиром 9 закреплена к корпусу 2 вертикальная опорная планка 13, установленная относительно нижней поверхности копира 9 с зазором а для прохода упора 8 рычага 6.
Грузозахватное устройство содержит также соединенные с траверсой 3 поворотные захватные скобы 14 и опорную металлоконструкцию 15. Траверса 3 выполнена из двух охватывающих скобы 14 поперечин 16, соединенных между собой сверху балкой 17 и снизу посредством осей 18 с роликами 19.
Механизм работает следующим образом.
В положении транспортирования грузозахватного устройства без груза (фиг. 5) фиксирующее устройство разомкнуто, захватные скобы 14 раскрыты.
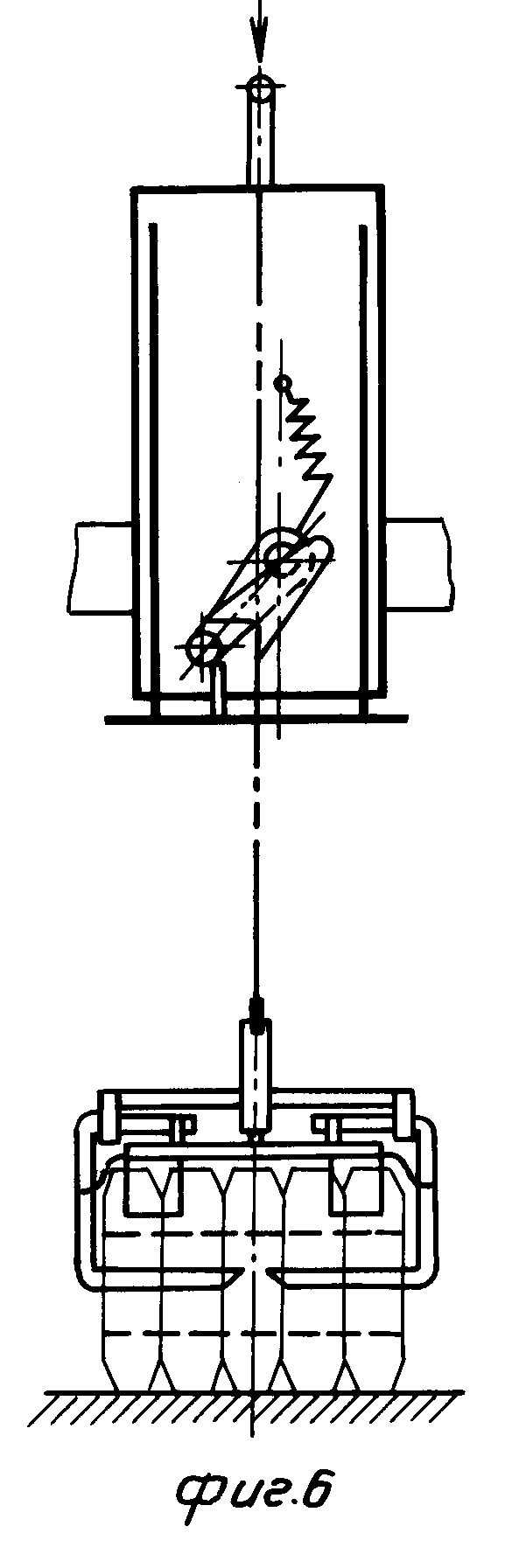
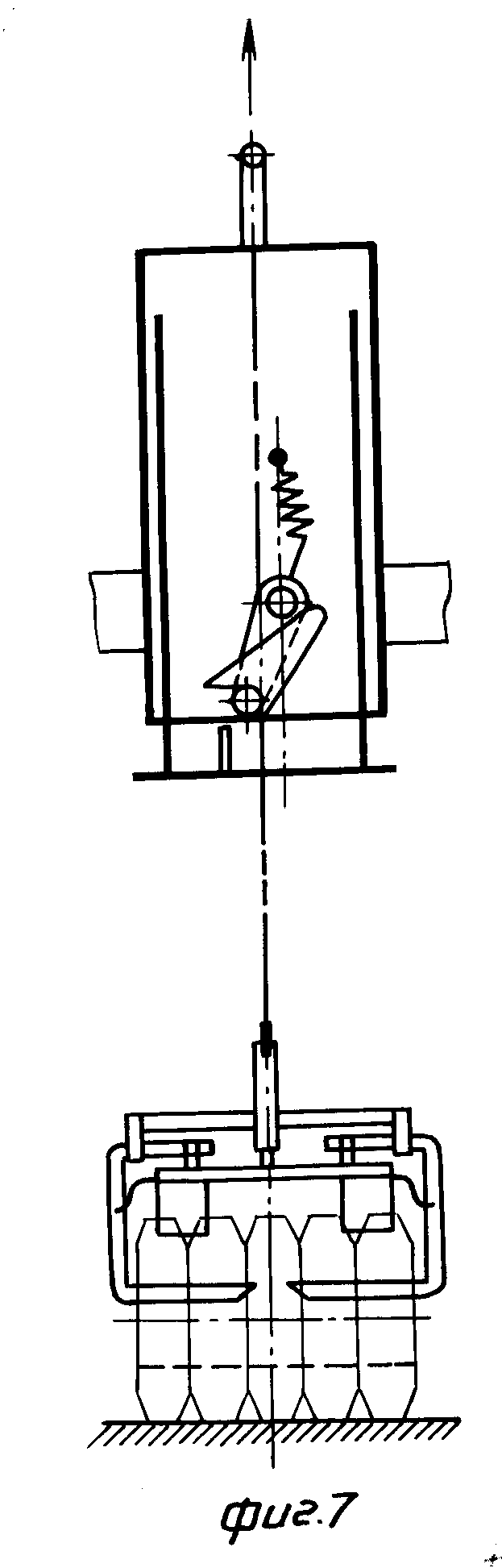
Для захватывания грузов (например, пакета шин 20) грузозахватное устройство опускают грузоподъемным механизмом (не показан). В процессе опускания устройства опорная металлоконструкция 15 ложится на шины 20, после чего траверса 3 с ползуном 4 продолжает опускаться, при этом захватные скобы 14 поворачиваются вниз и захватывают пакет шин 20 за их отверстия, а консольный упор 8 рычага 6, встречая на пути верхнюю наклонную поверхность 10 клиновидного копира 9, отклоняет рычаг 6 кверху, натягивая пружину 7, а после прохождения всей поверхности 10 копира 9 под воздействием собственного веса и пружины 7 переходит в положение упора в планку 13 (фиг.6). Затем поджимают устройство с пакетом шин. В начале движения вверх траверсы 3 с ползуном 4 упор 8 рычага 6 отходит от опорной планки 13 и под действием собственного веса и пружины 7 входит в зацепление с полукруглой выемкой 12 копира 9 (фиг. 7), фиксируя траверсу 3 относительно рамы 1, после чего подъем устройства с грузом продолжают.
Освобождение грузозахватного устройства от груза осуществляют следующим образом. Опускают пакет шин на опорную поверхность, после чего при дальнейшем опускании траверсы 3 с ползуном 4 упор 8 рычага 6 выходит из зацепления с выемкой 12 копира 9, занимая положение, показанное на фиг.8. Затем, при подъеме грузозахватного устройства, в начальный момент которого поджимается траверса 3 с ползуном 4, а рама 1 с корпусом 2 остается неподвижной, упор 8 рычага 6 скользит по нижней наклонной поверхности 11 копира 9, а затем под действием собственного веса и пружины 7 устанавливается в вертикальное положение, показанное на фиг.5. После полного раскрытия захватных скоб 14 при их соприкосновении с балкой 17 траверсы 3 начинается подъем вcего грузозахватного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ТРАВМ ВЕРХНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2074679C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| ДИСТАНЦИОННО-УПРАВЛЯЕМАЯ ЗАДВИЖКА | 1994 |
|
RU2087658C1 |
| КОНДУКТОРНАЯ ПОДВЕСКА ДЛЯ СБОРКИ ВЕЛОСИПЕДОВ | 1992 |
|
RU2032580C1 |
| МАНИПУЛЯТОР ДЛЯ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2113343C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ И ВУЛКАНИЗАЦИИ ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1997 |
|
RU2131355C1 |
| БИНОКУЛЯРНАЯ СТЕРЕОСКОПИЧЕСКАЯ ЛУПА | 1995 |
|
RU2107934C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОЛЕЦ С КОНИЧЕСКИМ ОТВЕРСТИЕМ | 1992 |
|
RU2008165C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
Использование: изобретение относится к грузоподъемной технике и может быть использовано в различных отраслях промышленности. Сущность изобретения: механизм фиксации грузозахватного устройства содержит закрепленный на несущей раме грузозахватного устройтсва корпус 2, взаимодействующий с корпусом с возможностью вертикального перемещения и соединенный с траверсой устройства ползун 4. Внутри корпуса 2 и ползуна 4 помещено фиксирующее устройство, которое выполнено в виде установленного на оси 5 в ползуне 4 поворотного рычага 6 с подпружиненным верхним концом, снабженного на нижнем конце консольным цилиндрическим упором 8, и жестко закрепленного в корпусе 2 клиновидного копира 9. Копир 9 снабжен для взаимодействия с упором 8 наклонными боковыми поверхностями и выполненной снизу полукруглой выемкой. Под копиром 9 закреплена в корпусе 2 для фиксации цилиндрического упора 8 рычага 6 при нижнем положении ползуна 4 вертикальная опорная планка, установленная относительно нижней поверхности копира 9 с зазором для прохода цилиндрического упора 8. Применение механизма фиксации позволяет упростить конструкцию грузозахватных устройств и обеспечивает долговечность работы при высокой надежности механизма. 8 ил.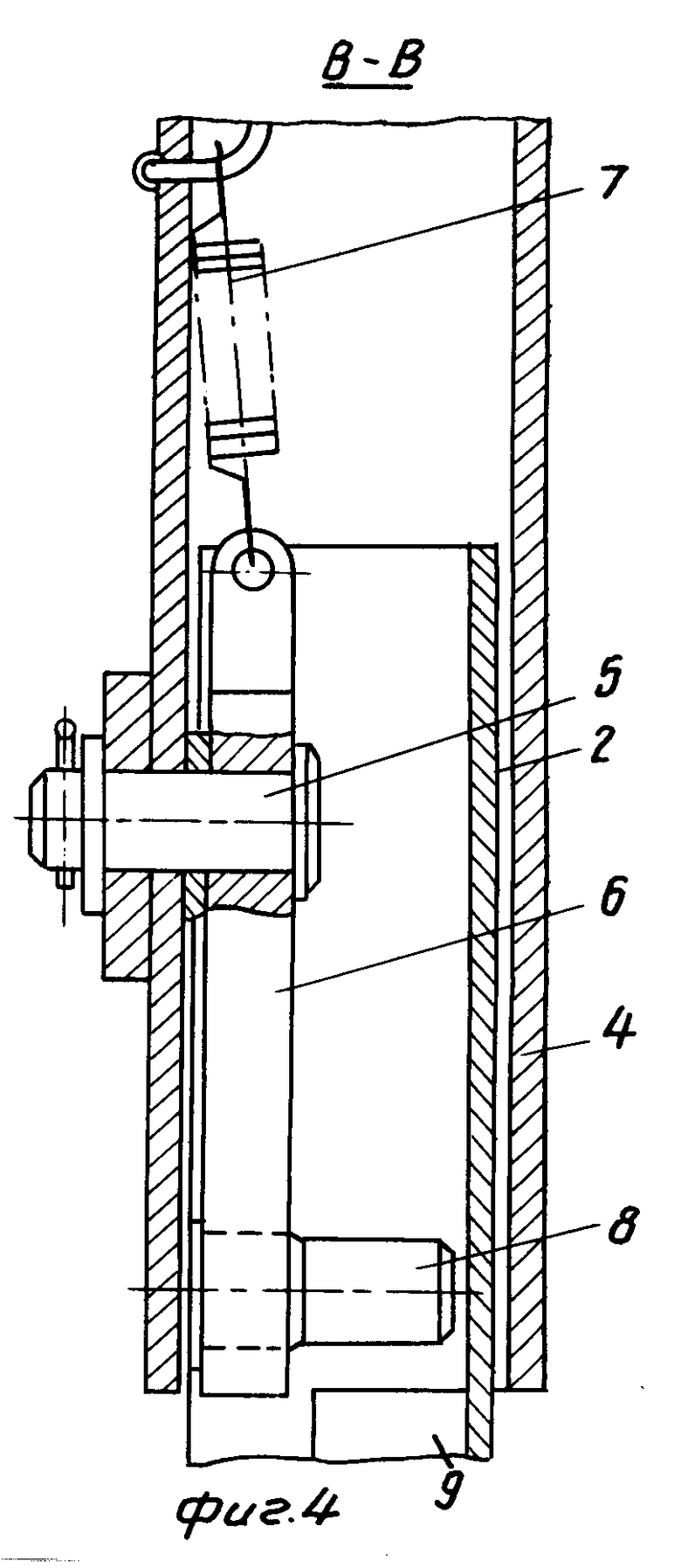
МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА, содержащий закрепленный на несущей раме устройства корпус, взаимодействующий с корпусом с возможностью вертикального перемещения ползун и размещенное внутри корпуса и ползуна фиксирующее приспособление, включающее в себя закрепленный на оси в ползуне поворотный рычаг с консольным цилиндрическим упором на нижнем конце, жестко закрепленный в корпусе копир, имеющий наклонные поверхности и расположенную снизу полукруглую выемку, и расположенную под копиром с зазором опору для фиксации цилиндрического упора рычага при нижнем положении ползуна, отличающийся тем, что верхнее плечо рычага подпружинено, копир выполнен клиновидным и наклонные поверхности расположены по бокам копира, а опора представляет собой вертикальную планку, размещенную с возможностью прохода цилиндрического упора рычага.
| Механизм фиксации грузозахватного устройства | 1982 |
|
SU1074804A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
