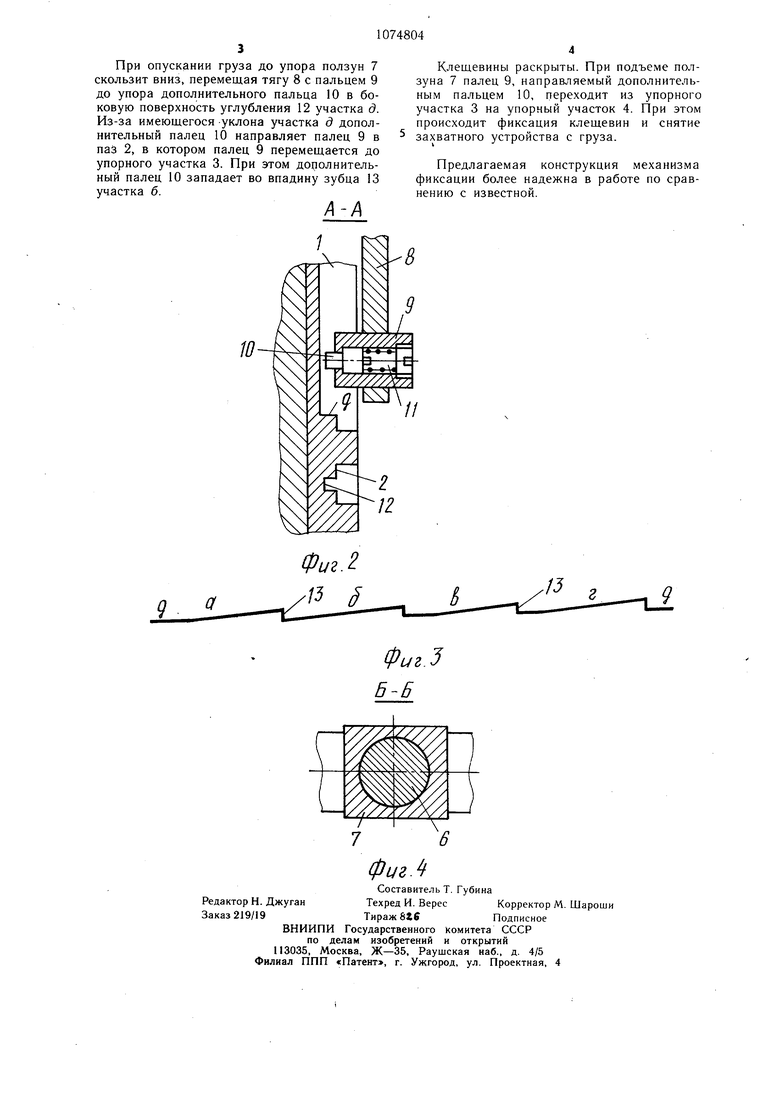
Изобретение относится к подъемным устройствам, а именно к захватам, захватывающим только наружные или внутренние поверхности изделий или грузов, и предназначено для применения при работе с горячими слитками. Известен механизм фиксации грузозахватного устройства, содержащий корпус с фигурным пазом, имеющим упорные участки и подвижный относительно него ползун с шарнирно закрепленной на нем тягой, на свободном конце которой закреплен установленный в пазу корпуса палец 1. Однако известное устройство недостаточно надежно в работе, так как в нем не исключена возможность обратного хода пальОбъясняется это тем, что тяга закреплена на ползуне щарнирно и при работе механизма она соверщает колебательные движения. А при отклонениях тяги от вертикальной оси возникают усилия, возвращающие ее в исходное положение. При этом палец не переходит на последующий упорный участок, а возвращается на предыдущий. Это приводит к нарушениям циклов работы механизма, т. е. к уменьшению надежности его работы. Кроме того, при установке грузозахватного устройства на не строго горизонтальную опорную поверхность не исключены случаи, когда усилия, возвращающие тягу с пальцем в вертикальное положение, увеличиваются, что дополнительно снижает надежность работы захвата. Целью изобретения является повышение надежности в работе. Цель достигается тем, что механизм фиксации грузозахватного устройства, содержащий корпус с фигурным пазом, имеющим упорные участки и подвижный относительно него ползун с щарнирно закрепленной на нем тягой, на свободном конце которой закреплен установленный в пазу корпуса палец, снабжен дополнительным пальцем, размещенным в отверстии, выполненном в первом пальце, и подпружиненным относительно последнего, при этом фигурный паз выполнен с углублением для дополнительного пальца по всей его протяженности, поверхность которого имеет развертку в виде храповика с зубцами, размещенными в местах сопряжения упорных участков фигурной прорези. Предлагаемое выполнение механизма фиксации исключает возможность обратного хода пальца, что повышает надежность его работы. На фиг. 1 изображен предлагаемый механизм фиксации грузозахватного устройства в раскрытом положении, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 развертка дополнительного копирного паза по основанию; фиг. 4 - разрез Б-Б на фиг. 1. Механизм фиксации клещевин грузозахватного устройства в раскрытом положении имеет корпус 1 с фигурным (петлеобразным) копирным пазом 2, имеющим упорные участки 3-5. На корпусе 1 в вертикальной направляющей 6 установлен ползун 7 с шарнирно закрепленной на нем тягой 8, на свободном конце которой закреплен палец 9, установленный в петлеобразном копирном пазу 2. Верхняя (по чертежу) часть копирного паза 2 выполнена открытой со стороны ползуна 7, что увеличивает диапазон захвата предлагаемого устройства. Палец 9 (фиг. 2) выполнен с отверстием, в котором установлен дополнительный палец 10 с пружиной 11. Для перемещения дополнительного пальца 10 корпус 1 выполнен с дополнительным и идентичным по форме нижней части копирного паза 2 углублением 12, имеющим участки а, б, в, г и д. Углубление 12 имеет развертку в виде храповика с зубцами 13, образованными от пересечения смежных участков а, б, в, г и д. Механизм фиксации работает следующим образом. Грузозахватное устройство навещивается на грузоподъемный орган через звено, соединенное с ползуном 7 (не показано). Палец 9 находится на упорном участке 4 копирного паза 2. При этом дополнительный палец 10 находится во впадине зубца 13 участка в (см. также фиг. 3), что соответствует фиксации клещевин в раскрытом положении. Грузозахватное устройство опускается на захватываемый груз. Ползун 7 при этом за счет собственного веса узлов грузозахватного устройства перемещается вниз по вертикальной направляющей 6 грузозахват ° о устройства. Одновременно палец 9, направляемый дополнительным пальцем 10, скользящим по участку е в углублении 12, переходит из упорного участка 4 на упорный участок 5 паза 2. Дополнительный палец 10, перемещаясь в углублении 12 за счет уклона на участке е, перемещается вдоль оси паль ца 9 и сжимает пружину 11. Ползун 7 опускается вниз до упора пальца 9 в упорный участок 5, при этом дополнительный палец 10 западает во впадину 13 участка г. После этого грузоподъемный орган поднимает ползун 7. Палец 9, направляемый дополнительным пальцем 10, скользит в пазу 2. Клещевины при этом сходятся. Палец 9 выходит из лаза 2, при этом дополнительный палец 10 западает во впадину зубца 13 участка д, клещевины захватывают груз, обеспечивая возможность его транспортировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Механизм фиксации грузозахватногоуСТРОйСТВА | 1978 |
|
SU839986A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Механизм фиксации положения рычагов грузозахватного устройства | 1986 |
|
SU1381056A1 |
| Револьверная головка | 1980 |
|
SU908544A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ СЛИТКОВ | 2006 |
|
RU2309889C1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Механизм фиксации положения захватных рычагов грузозахватного устройства | 1987 |
|
SU1477652A1 |
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА, содержащий корпус с фигурным пазом, имеющим упорные участки, и подвижный относительно него ползун с шарнирно закрепленной на нем тягой, на свободном конце которой закреплен установленный в пазу корпуса палец, отличающийся тем, что, с целью повыщения надежности в работе, он снабжен дополнительным пальцем, размещенным в отверстии, выполненном в первом пальце, и подпружиненным относительно последнего, при этом фигурный паз выполнен с углублением для дополнительного пальца по всей его протяженности, поверхность которого имеет развертку в виде храповика с зубцами, размещенными в местах сопряжения упорных участков фигурной прорези. (Л 4 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм фиксации грузозахватногоуСТРОйСТВА | 1978 |
|
SU839986A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
