1
(21)4839314/28 (22) 14.06.89 (46)30.09.92. Бюл. №36
(71)Пензенский политехнический институт
(72)С.Б Демин
(56)Авторское свидетельство СССР № 1024692, кл. G 01 В 7/00, 1983.
Авторское свидетельство СССР № 1368628, кл. G 01 В 17/00, 1988. (54) УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ
(57)Изобретение относится к измерительной технике, а именно к магнитоакустиче- ским преобразователям перемещений, и может найти применение в робототехниче- ских системах и комплексах для двухкоор- динатного измерения параметров линейного перемещения объекта. Цель изобретения - повышение точности и надежности измерения перемещений. Ультразвуковой преобразователь перемещения содержит Г-образный магнитострикцион- ный звукопровод с установленными на нем неподвижными сосредоточенными элементами считывания и подвижными поляризующими магнитами, которые механически связаны с перемещающимся объектом. В ветвях магнитострикционного звукопрово- да импульсами тока возбуждаются акустические волны, которые распространяются от точек расположения поляризующих магнитов к концам звукопроводов. По времени распространения указанных волн в ортогонально расположенных ветвях звукопрово- да судят о координатах перемещающегося объекта 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1552002A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2100775C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
Изобретение относится к измерительной технике, а именно к магнитоакустиче- ским преобразователям перемещений, и может найти применение в системах двух- координатного измерения параметров кинематического движения объекта,
Известен ультразвуковой преобразователь перемещений, содержащий два реохорда, источник напряжения постоянного тока, источник напряжения пульсирующего тока и регистратор.
Известен ультразвуковой преобразователь перемещений, выбранный в качестве прототипа, который содержит основание, звукопровод, закрепленный на основании, первый и второй акустические поглотители, установленные на концах звукопровода, первый и второй сосредоточенные элементы считывания, установленные на звукопро- воде рядом с акустическими поглотителями, подключенные к выходам последних первый и второй избирательные усилители- формирователи считывания и последовательно соединенные формирователь импульсов и усилитель записи
Основными недостатками известного устройства являются невысокая точность и надежность измерения двухкоординатного перемещения объекта.
Целью изобретения является повышение точности и надежности измерения перемещений.
Это достигается тем, что в ультразвуковой преобразователь перемещений, содержащий основание,звукопровод,закрепленный на основании, первый и второй акусти О СП О Ю О
ческие поглотители, установленные на концах звукопровода, первый и второй сосредоточенные элементы считывания, установленные на звукопроводе рядом с акустическими поглотителями, подключенные к выходам последних, первый и второй избирательные усилители-формирователи считывания и последовательно соединенные формирователь импульсов и усилитель записи, дополнительно введены первый и второй поляризующие магниты, установленные на расположенных ортогонально ветвях звукопровода с возможностью продольного перемещения, первый и второй триггеры управления, триггер контроля ошибки, первый и второй измерительные генераторы, первый и второй, счетчики результата, первый и второй инверторы, первый и второй элементы ИЛИ, звукопровод выполнен из магнитострикционного материала и гальванически связан с выходом усилителя записи, выходы первого и второго избирательных усилителей-формирователей считывания подключены соответственно к синхровходам первого и второго триггеров управления, их выходы соединены со входами первого и второго измерительных генераторов и входами первого элемента ИЛИ. Выход последнего служит шиной запроса, выходы измерительных генераторов подключены соответственно к счетным входам первого и второго счетчиков результата, их разрядные выходы служат первой и второй шинами результата. Выходы переноса первого и второго счетчиков через второй элемент ИЛИ подключены к синхровходу триггера контроля ошибки, нулевые входы объединены с входами первого и второго инверторов и подключены к выходу формирователя импульсов, сигнальный вход последнего служит шиной запу- .ска, а управляющий вход служит шиной управления и соединен с нулевыми входами первого и второго триггеров управления и триггера контроля ошибки, единичные входы всех триггеров объединены и соединены с выходом первого инвертора, выход триггера контроля ошибки служит шиной контроля ошибки, выход второго инвертора - шиной синхронизации, а поляризующие магниты предназначены .для кинематического соединения с перемещающимся объектом.
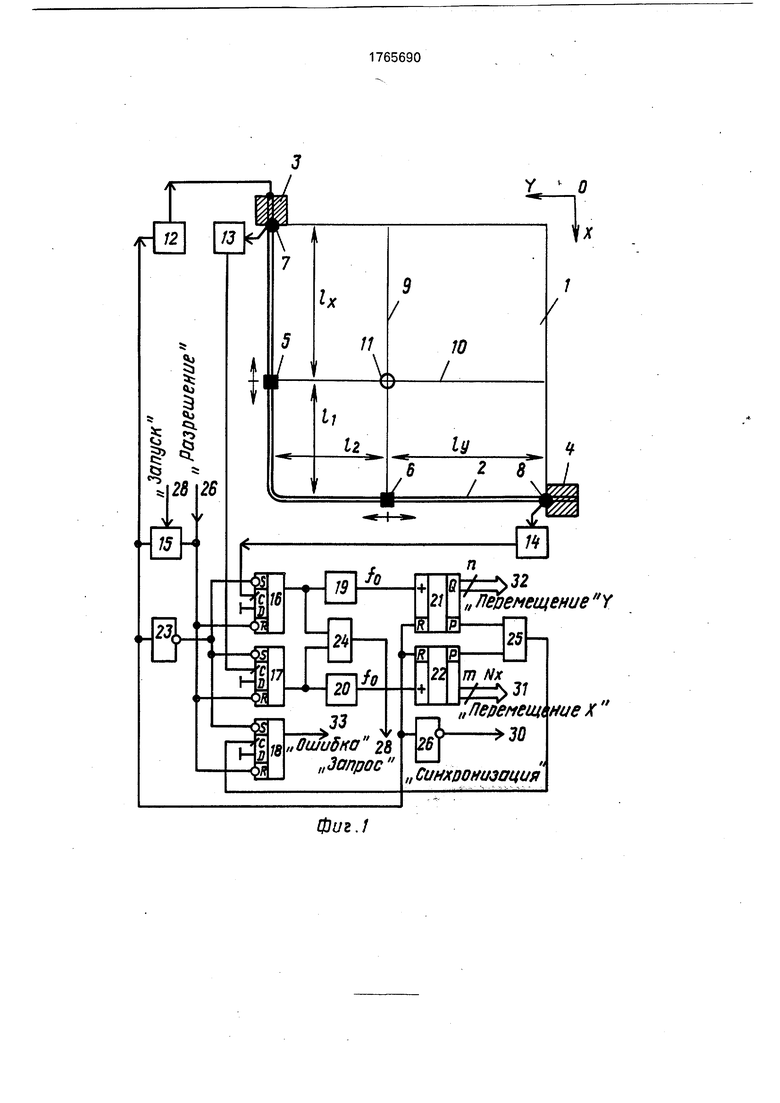
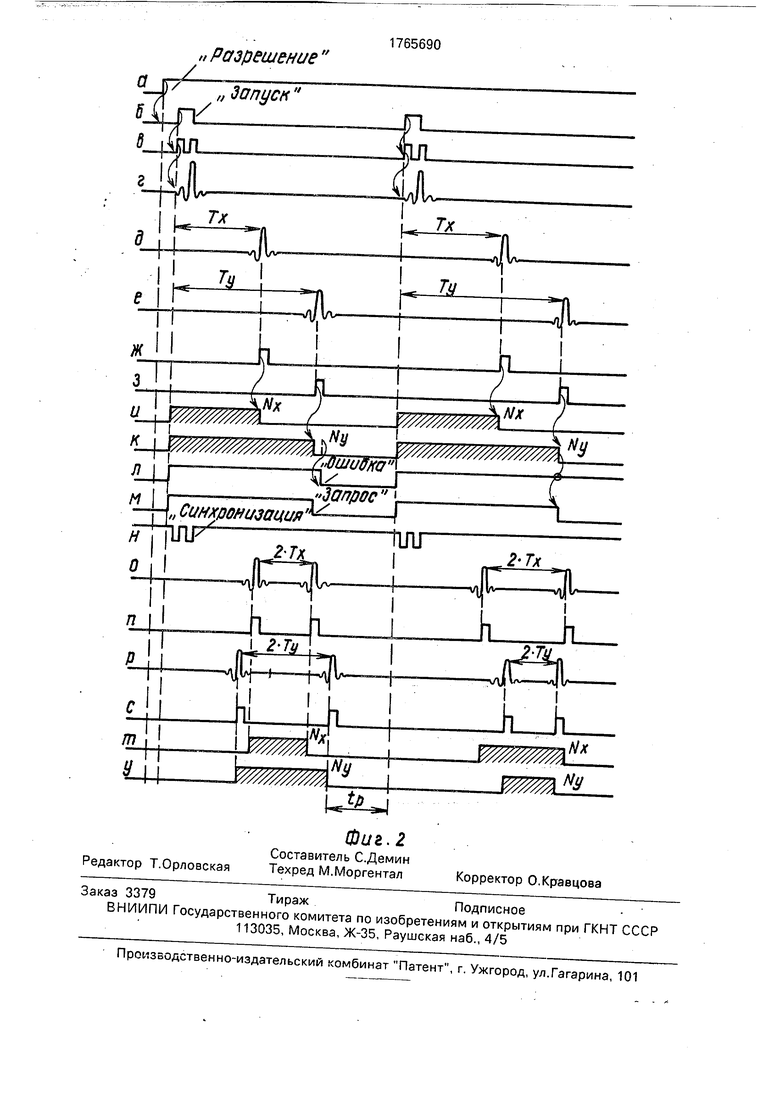
На фиг,1 приведена блок-схема ультразвукового преобразователя перемещений; на фиг.2 - основные временные диаграммы, поясняющие его работу.
Ультразвуковой преобразователь перемещений (фиг.1), содержит двухкоординат- ный первичный магнитострикционный
преобразователь перемещений (ДМПП), состоящий из основания 1, Г-образного звуко провода 2 из магнитострикционного материала, двух акустических поглотителей
5 3,4, подвижных поляризующих магнитов 5,6, неподвижных сосредоточенных элементов 7,8, считывания и координатных поводковых элементов 9,10 с визирным элементом 11, усилителя 12 записи и двух
0 избирательных усилителей-формирователей 13,14 считывания и вторичный преобразователь, состоящий из формирователя 15 импульсов, двух триггеров 16,17 управления и триггера 18 контроля ошибки, двух изме5 рительных генераторов 19,20 и счетчиков 21,22 результата, первого инвертора 23, двух элементов ИЛИ 24,25, второго инвертора 26, а также шину 27 управления, шину 28 запроса, шину 29 запуска, шину 30 синх0 ронизации, первые и вторые шины 31,32 результата и шину 33 контроля ошибки,
На основании ДМПП закреплен Г-об- разный магнитострикционный звукопровод 2 с углом изгиба 90°, заключенный в акусти5 ческие поглотители 3,4 и включенный гальванически в электрическую цепь записи усилителя 12 записи. На его ортогональных ветвях закреплены поляризующие магниты 5,6, выполненные с возможностью переме0 щения, которые через координатные поводковые элементы 9,10 и визирный элемент 11 кинематически подключены к объекту.
Вблизи акустических поглотителей 3,4 на ветвях звукопровода. 2 неподвижно за5 креплены сосредоточенные элементы 7,8 считывания, подключенные к входам первого и второго избирательных усилителей- формирователей 13,14 считывания. Их выходы подсоединены к синхровходам пер0 вого и второго триггеров 16,17 управления вторичного преобразователя, которые в свою очередь подключены к входам первого и второго измерительных генераторов 19,20 первого элемента 24 ИЛИ соответственно.
5 Выходы генераторов 19,20 соединены со счетными входами первого и второго счетчиков 21,22 результата. Их разрядные выходы подключены соответственно к первым и вторым шинам 31,32 результата, а
0 выходы переноса через второй элемент 25 ИЛИ подсоединен к синхровходу триггера 18 контроля ошибки. Его выход подключен к шине 33 контроля ошибки, а выход первого элемента 24 ИЛИ подключен к шине 28
5 запроса. Нулевые входы триггеров 16,17,18 объединены, соединены с одним входом формирователя 15 импульсов и подключены к шине 27 управления. Сигнальный вход формирователя 15 импульсов подключен к
шине 29 запуска, а выход соединен с входами усилителя 12 записи, первого и второго инверторов 23,26 и нулевыми входами счетчиков 21,22 результата. Выход второго инвертора 26 подключен к шине 30 синхронизации, а выход первого инвертора 23 соединен с единичными входами триггеров 16,17,18.
Ультразвуковой преобразователь перемещений работает следующим образом.
В исходном состоянии по шине 27 управления выставлен запрещающий работу преобразователя сигнал (фиг.1). В этом режиме его запуск невозможен. Перевод преобразователя в режим работы производится при подаче сигнала Разрешение (фиг.2а) по шине 27 управления. Разблокируются формирователь 1§.импульсов и триггеры 16,17,18, установленные первоначально в нулевое состояние (фиг.2и,к).
По шине 28 запроса выставляется сигнал Запрос (фиг.2м), в ответ на который через время реакции tp по шине 29 запуска выставляется сигнал Запуск (фиг.26). Формирователь 15 импульсов вырабатывает сдвоенный прямоугольный видеоимпульс записи со скважностью равной 2 (фиг.2в), которым возбуждается усилитель 12 записи, обнуляются счетчики 21,22 результата и через инвертор 23 устанавливаются в единичное состояние триггеры 16,17,18. Это приводит к синхронному запуску измерительных генераторов 19,20, вырабатывающих счетные импульсы частоты fo, которые проходят на счетные входы первого и второго счетчиков 21,22 результата, где и накапливаются (фиг.2и,к). По шине 28 запроса снимается сигнал Запрос (фиг.2м), а по шине 30 синхронизации выставляется сигнал Синхронизация (фиг.2н).
На выходе усилителя 12 записи формируются токовые посылки, которые проходят через среду магнитострикционного звуко- провода 2 и возбуждают в его среде под поляризованными магнитами 5,6 упругие волны удвоенной амплитуды (фиг.2г) вслед- ствии магнитомеханического преобразования. Упругие волны распространяются в обе стороны по ортогональным ветвям звуко- провода 2 со скоростью волны кручения VKp и достигают первый и второй сосредоточенные элементы 7,8 считывания через искомые временные интервалы перемещения:
Т,
х
Iv
Т - У VKP
у-чг-О)
«кр
где x,ly - расстояние между поляризующими магнитами 5,6 и элементами 7,8 считывания по координатным осям X и Y.
Проходя по ветвям звукопровода 2 под элементами 7,8 считывания упругие волны (фиг.2,д,е) наводят на их выводах импульсы напряжения считывания вследствии магнитоупругого преобразования, которые усиливаются и преобразуются в прямоугольные видеоимпульсы считывания избирательными усилителями-формирователями 13,14 считывания (фиг.2ж,з). Сигналы считывания
проходят на синхровходы первого и второго триггеров 16,17 управления и переводят их в исходное состояние. Измерительные генераторы 19,20 останавливаются, и в следующий момент на выходах первого и второго
счетчиков 21,22 результата выставляются m и п - разрядные коды искомого двухкоорди- натного перемещения объекта
20
Nx Tx-fo, Ny Ty -fo, (2)
формируя по шинам 31,32 результата сигналы Перемещение X и Перемещение Y (фиг.2и,к). По шине 28 запроса выставляется сигнал Запрос (фиг.2м). Другие упругие волны, распространяясь далее по ветвям звукопровода 2, проходят в его смежные ветви и через время:
Tiasli + b±lxi T2 l+il±iy (3)
V
кр
V,
кр
где(h+te)- расстояние между поляризующими магнитами 5,6 по образующей звукопровода 2,
считываются элементами 7,8 считывания. На выходах избирательных усилителей-формирователей 13,14 считывания формируются сигналы считывания, которые подтверждают состояние триггеров 16,17 управления. Достигая акустические поглотители 3,4 упругие волны испытывают поглощение и образование, накопление в среде магнитострикционного звукопровода 2 акустической энергии отраженных волн не
происходит, поддерживается заданное отношение сигнал/помеха. На этом цикл преобразования завершается и он переходит в режим ожидания очередного цикла преобразования, который начинается по инициативе пользователя и выполняется согласно рассмотренного.
В случае нарушения режима работы преобразователя в виде переполнения раз- рядных сеток счетчиков 21,22 производится переключение триггера 18 контроля ошибки и по шине 33 контроля ошибки будет выставлен сигнал Ошибка (фиг.2л), информируя пользователя о недостоверности
информации в текущем цикле преобразователя.
Точность измерения перемещения объекта по сравнению с прототипом повышена за счет уменьшения составляющей погрешности из-за дисперсии скорости упругой волны в звукопроводе. Применение поляризующих магнитов в качестве координатных задатчиков положения объекта повышает динамические характеристики ДМПП и срок эксплуатации, упрощает его кинематическую схему, что ведет к расширению области .применения. Возбуждение в среде магнитострикционного звукопровода ДМПП упругих волн удвоенной амплитуды и повышение избирательности цепей считывания повышает помехоустойчивость преобразования, а использование самоконтроля - повышает надежность преобразователя.
Формула изобретения Ультразвуковой преобразователь перемещений, содержащий основание, звуко- провод, закрепленный на основании, первый и второй акустические поглотители, установленные на концах звукопровода, первый и второй сосредоточенные элементы считывания, установленные на звукопроводе рядом с акустическими поглотителями, подключенные к выходам последних, первый и второй избирательные усилители- формирователи считывания и последовательно соединенные формирователь импульсов и усилитель записи, о т л и ч а га- щи и с я тем, что, с целью повышения точности и надежности измерения перемещений, он снабжен первым и вторым поляризующими магнитами, установленными на расположенных ортогонально ветвях звукопровода с возможностью продольного перемещения, первым и вторым триггерами управления, триггером контроля ошибки, первым и вторым измерительными генераторами, первым и вторым счетчиками результата, первым и вторым инверторами, первым и вторым элементами ИЛИ, звуко- провод выполнен из магнитострикционного материала и гальванически связан с выходом усилителя записи, выходы первого и
второго избирательных усилителей-формирователей считывания подключены соответственно к синхровходам первого и второго триггеров управления, их выходы соединены с входами первого и второго измерительных генераторов и входами первого элемента ИЛИ, выход последнего служит шиной запроса, выходы измерительных генераторов подключены соответственно к счетным входам первого и второго счетчиков результата, их разрядные выходы служат первой и второй шинами результата, выходы переноса первого и второго счетчиков через второй элемент ИЛИ подключены к синхровходу триггера контроля ошибки,и
нулевые входы объединены с входами первого и второго инверторов и подключены к выходу формирователя импульсов, сигнальный вход последнего служит шиной запуска, а управляющий вход служит шиной управления и соединен с нулевыми входами первого и второго триггеров управления и триггера контроля ошибки, единичные входы всех триггеров объединены и соединены с выходом первого инвертора, выход триггера контроля ошибки служит шиной контроля ошибки, выход второго инвертора - шиной синхронизации, а кольцевые поляризующие магниты предназначены для кинематического соединения с перемещающимся контролируемым объектом.
Фиг. I
Ј. О
„Разрешение
U
л м
K-jrW MtMzm ТйиШка
11
L
, Y, Синхронизация - /ГГШ1
5
Запрос
/
7
U
п
L г-й
Редактор Т.Орловская
Фаг .2
Составитель С.Демин Техред М.Моргентал
1765690
Wt zzzzzm.
г
шг
7
..
h-
Jn-Ji
t
Корректор О.Кравцова
