Изобретение относится к измерению координат поверхности геометрических тел различной формы и может быть использовано, в частности, при измерении в автоматическом режиме внутренних размеров негатива протеза (гильзы) или внешних размеров позитива культи (гипсового слепка) инвалида в процессе подготовки и изготовления протеза. Пригодно для измерений других параметров на поверхности тел.
Известны различные устройства, предназначенные для измерения координат поверхности (снятия геометрических размеров), например с использованием фотоэлементов [1] методом сечения световой плоскостью [2] теневым методом [3] и др.
Однако они на выпуклой поверхности не позволяют определять координаты поверхности вмятин, что ограничивает возможности устройств.
Наиболее близкой по технической реализации и достигаемому результату к изобретению является устройство [4] для координатного контроля поверхностей изделий, содержащее реверсивно вращающуюся платформу (стол), на которую устанавливается измеряемый объект, например лопасть гидротурбины (макет приемной гильзы культи), связанный с нею редуктор (шестерни) и механизм поступательного перемещения измерительной головки параллельно оси вращения платформы.
Кроме того, прототип имеет две оси вращения стола, измерительная головка имеет возможность перемещаться в поперечном направлении и вращаться, имеются раздельные приводы для вращения стола и перемещения измерительной головки. Фактически это набор механизмов, обеспечивающих перемещение измерительной головки в заданную точку измеряемого объекта под заданным углом. Производительность этого устройства очень низкая.
Цель изобретения увеличение информативности и/или производительности.
Это достигается тем, что механизм относительного перемещения измеряемого объекта и измерительной головки, содержащий реверсивно вращающуюся платформу, связанный с нею редуктор и устройство перемещения измерительной головки параллельно оси вращения платформы, снабжен муфтой сцепления, входной вал которой связан с редуктором, выходной вал с устройством перемещения измерительной головки, а муфта сцепления имеет свободный ход.
Кроме того, свободный ход муфты сцепления равен половине оборота платформы.
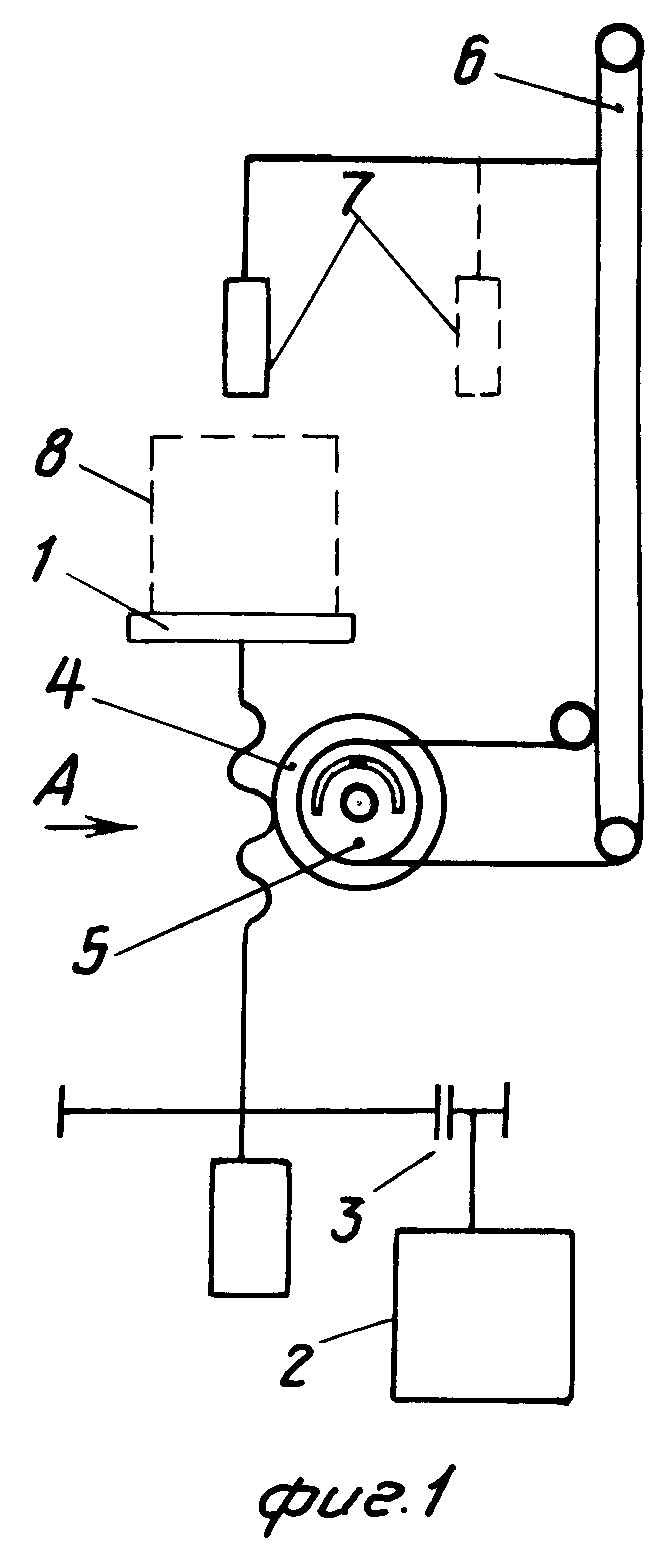
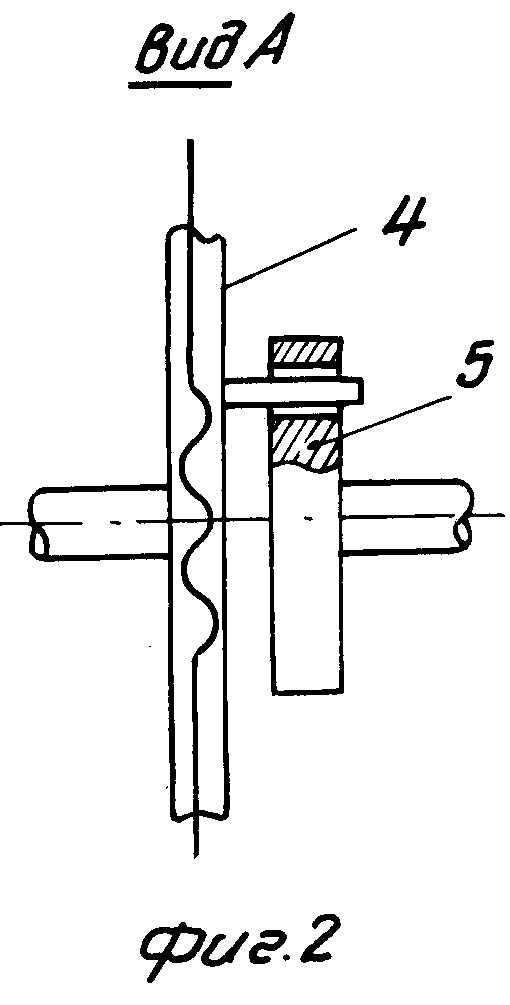
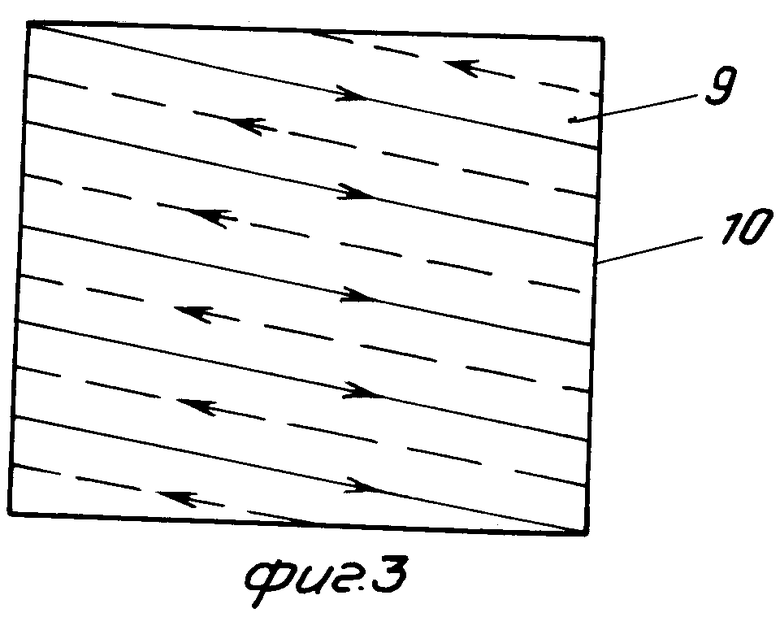
На фиг.1 приведена кинематическая схема механизма; на фиг.2 увеличенное изображение редуктора и муфты сцепления (вид по стрелке А на фиг.1); на фиг. 3 плоская развертка траектории измерения координат на поверхности измеряемого объекта цилиндрической формы.
Предлагаемый механизм содержит реверсивно вращающуюся платформу 1 с приводом 2 вращения и датчиком 3 угла поворота, редуктор 4, муфту 5 (или полумуфту) сцепления, устройство 6 поступательного перемещения измерительной головки, измерительную головку 7, измеряемый объект 8, развертку 9 измеряемого объекта цилиндрической формы; 10 траектория измерения координат на поверхности измеряемого объекта (на плоской развертке измеряемого объекта цилиндрической формы).
Пунктиром на фиг.1 показано другое положение измерительной головки при измерении координат внешней поверхности измеряемого объекта.
Выполнено устройство следующим образом.
Вращающаяся платформа 1 с жестко связанным с нею датчиком 3 угла поворота механически (с помощью шестерен, ремня или червяка) связана с реверсивным приводом вращения 2 (электродвигатель).
Устройство 6 поступательного перемещения измерительной головки вдоль оси вращения платформы 1 (на чертеже показано ременное или цепное устройство, но может быть и любое другое, например, винтовое, как в прототипе), на котором установлена измерительная головка 7, связано с платформой 1 через редуктор 4 и муфту 5 сцепления.
Особенность муфты сцепления заключается в том, что она при изменении направления вращения платформы обеспечивает заданный свободный ход, например половину оборота платформы. Муфту сцепления и редуктор (при некоторых конструктивных изменениях) можно поменять местами. Кроме того, они могут быть объединены в один механизм, выполняющий обе функции.
На фиг.3 сплошными линиями 10 на развертке 9 измеряемого объекта 8 (фиг. 1), имеющего в частном случае форму цилиндра, показана траектория измерения при перемещении измерительной головки вниз, а пунктирными при движении вверх при свободном ходе муфты, равном половине оборота.
Устройство работает следующим образом.
В исходном состоянии измерительная головка 7 находится в верхнем положении. При включении привода вращения 2 начинает вращаться платформа с установленным на ней измеряемым объектом 8 (показан пунктиром). Муфта 5 сцепления выбирает люфт, и измерительная головка 7 начинает опускаться во внутреннюю полость измеряемого объекта 8. Начинается процесс измерения объекта по траектории 10 плоской развертки 9, проведенной на фиг.3, например, из левого верхнего угла снижающимися вправо сплошными линиями.
Когда измерительная головка опустится до нижнего положения (правый нижний угол плоской развертки 9 на фиг.3), механизм останавливается. После этого включается реверс платформы. В течение времени, пока муфта сцепления выбирает люфт, например, в половину оборота, измерительная головка не поднимается и траектория измерения пролегает горизонтально, например, от нижнего правого угла до середины плоской развертки 9 (фиг.3). В этот момент люфт муфты сцепления выбирается, измерительная головка начинает подниматься и траектория измерения ложится на пунктирные линии, поднимающиеся влево от середины нижнего края плоской развертки 9 точно между снижающимися линиями, получившимися при опускании измерительной головки.
При свободном ходе муфты, равном полному обороту, могут быть сняты координаты всей кромки измеряемого объекта для подготовки, например, переходной обечайки или другого переходного устройства. Может потребоваться свободный ход более одного оборота платформы.
Однако, учитывая, что переходные устройства обычно выполняют стандартными, наиболее целесообразным свободным ходом следует признать именно половину оборота. В таком случае траектории измерения при опускании измерительной головки 7 и при ее подъеме нигде не пересекаются и равномерно с двойной плотностью покрывают поверхность измеряемого объекта 8. При этом количество полезной информации по сравнению с прототипом за то же время измерения (время движения измерительной головки вниз и вверх) также увеличивается вдвое. При этом поверхность измеряемого объекта покрывается равномерными траекториями измерений, что упрощает последующую математическую обработку результатов измерений и увеличивает их точность.
Такое решение устройства при избытке информации (ежели таковой имеется или образуется) позволяет увеличить производительность за счет того, что в устройстве может быть увеличена (например, вдвое) скорость движения измерительной головки по вертикали (за счет увеличения шага движения по вертикали), поскольку при этом все равно сохраняется количество шагов измерения на данный измеряемый объект за один цикл измерения.
Приведенным примером не исчерпываются варианты использования устройства. Так, расположив измерительную головку 7 ближе к механизму 6 поступательного перемещения измерительной головки (это положение измерительной головки показано пунктиром на фиг.1), можно определять координаты наружной поверхности измеряемого объекта 8, например гипсового слепка.
Возможны и другие применение данного устройства. Так, установив соответствующую измерительную головку можно определять толщину покрытия, цвет или температуру отдельных участков объекта, наличие дефектов на поверхности объекта, уровень вибрации и т.д.
Следует отметить, что реверсивно вращающаяся платформа может не иметь связанного с нею датчика 3 угла поворота, если в качестве реверсивного привода будет использован шаговый двигатель, угол поворота которого однозначно связан с количеством поданных на него импульсов.
Таким образом совокупность новых признаков дает новый положительный эффект, заключающийся в увеличении информативности и/или производительности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2006431C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ЗАДАННОЙ ОСИ ДО ТОЧЕК ПОВЕРХНОСТИ | 1993 |
|
RU2057284C1 |
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1992 |
|
RU2029934C1 |
| СПОСОБ РАЗГРУЗКИ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2028256C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШАРОВОГО ШАРНИРА | 1991 |
|
RU2029665C1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ | 1991 |
|
RU2011062C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| ИНТЕГРАТОР ПОСТОЯННОГО ТОКА (НАПРЯЖЕНИЕ) | 1990 |
|
RU2006945C1 |
| ШЕСТЕРЕННЫЙ НАСОС | 1991 |
|
RU2027909C1 |
| ИЗМЕРИТЕЛЬ УГЛА ОТКЛОНЕНИЯ ОСИ КОСМИЧЕСКОГО АППАРАТА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1993 |
|
RU2020412C1 |
Изобретение относится к измерению координат поверхности геометрических тел различной формы и может быть использовано в частности,при измерении в автоматическом режиме геометрических размеров негатива протеза (гильзы) или позитива культи (гипсового слепка) инвалида в процессе подготовки и изготовления протеза. Цель изобретения увеличение информативности и/или производительности. Это достигается тем, что в механизм относительного перемещения измеряемого объекта и измерительной головки, содержащий реверсивно вращающуюся платформу, связанный с нею редуктор, и устройство перемещения измерительной головки, дополнительно введена муфта сцепления, входной вал которой связан с редуктором, а выходной - с устройством перемещения измерительной головки, причем муфта сцепления имеет свободный ход (люфт), равный половине оборота платформы. 1 з.п. ф-лы, 3 ил.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для координатного контроля поверхностей изделий | 1970 |
|
SU524067A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
