Изобретение относится к области автоматического регулирования, а конкретно к системе управления многостепенными динамическими стендами, содержащими в своем составе несколько следящих систем, каждая из которых управляет одним исполнительным механизмом, например исполнительными силовыми гидроцилиндрами, управляющими единой нагрузкой динамического стенда - тренажера транспортного средства, работающего в комплексе полунатурного моделирования условий полета при тренировках и обучении экипажей транспортных средств, в частности самолетов и вертолетов.
Известны динамические стенды, предназначенные для использования в тренажерах, например динамический стенд КТС ТУ-204 [1], предназначенный для воспроизведения акселерационной информации и содержащий платформу с полезной нагрузкой (кабиной тренажера имитируемого транспортного средства) и управляемый шестью силовыми гидроцилиндрами, штоки которых попарно с помощью верхних шарниров соединены с платформой, а корпуса с помощью нижних шарниров - с фундаментом.
Каждый силовой гидроцилиндр имеет устройство для измерения длины его выдвижения и в комплекте с ним, гидроусилителем и электрической схемой управления образует следящую систему, управляемую внешним задающим сигналом, поступающим из системы управления тренажером и обеспечивающим разложение управляющих сигналов по координатам, соответствующим каждому силовому гидроцилиндру.
Качественные параметры каждого гидропривода определяются [2, стр.214], [3] как функция входящих в него составляющих: гидроцилиндра, гидроусилителя, элементов электрической схемы управления и т.д. Все перечисленные звенья имеют неизменную в процессе работы передаточную функцию и только гидроцилиндр имеет передаточную функцию  , изменяющуюся в зависимости от текущего положения его в пространстве и параметров движения его штока.
, изменяющуюся в зависимости от текущего положения его в пространстве и параметров движения его штока.

где  - коэффициент усиления гидроцилиндра,
- коэффициент усиления гидроцилиндра,
р - оператор Лапласа,
Тг - гидравлическая постоянная времени,
Тм - механическая постоянная времени.
Поэтому одним из главных условий качественной работы комплекса следящих гидроприводов динамического стенда, является высокое качество регулирования, точность и синхронность их работы, что обеспечивается равенством частотных характеристик гидроприводов и их реакций на управляющие и возмущающие воздействия. При этом требуется не только равенство переходных процессов гидроприводов, но и апериодический характер их протекания с высоким качеством регулирования для исключения возможности появления переходных процессов с перерегулированиями и автоколебаниями, а также излишней длительности их протекания при скачках управляющего воздействия вверх и вниз для каждого гидропривода.
Выполнение этих условий осложняется тем, что каждый гидропривод динамического стенда находится под воздействием существенной неуравновешенности, обусловленной весом платформы и полезной нагрузки, приходящимися на каждый силовой гидроцилиндр. При имитации движений реального объекта неуравновешенность, воздействующая на каждый силовой гидроцилиндр, постоянно изменяется в зависимости от угловых положений платформы динамического стенда и ее линейных перемещений в горизонтальной плоскости.
Существенное улучшение частотных характеристик следящих приводов и выравнивание параметров переходных процессов при движении штоков силовых гидроцилиндров можно получить за счет использования в структуре каждого гидропривода коррекции по сигналу скорости, ускорению или дифференциала ошибки [4]. Чем больше коэффициенты передачи контуров обратных связей по скорости и ускорению, тем меньше разница в переходных процессах. Технические решения, частично обеспечивающие выполнение этих условий, используются в динамическом стенде КТС ТУ-204 [1]. Однако невысокое качество регулирования и ограничения, накладываемые условиями устойчивости контуров привода, не позволяют обеспечить такие коэффициенты передачи контуров следящей системы, которые позволили бы полностью уравнять переходные процессы и придать им апериодический характер протекания при движении штоков силовых гидроцилиндров вверх и вниз.
Известен динамический многостепенной стенд [5], содержащий платформу, несущую полезную нагрузку - жестко закрепленную кабину тренажера имитируемого транспортного средства, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве. Каждый гидропривод имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента (датчика положения штока силового гидроцилиндра), сумматора, устройства компенсации действующей на цилиндр неуравновешенности, усилителя мощности, гидроусилителя и силового гидроцилиндра. Электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен ко второму входу гидроусилителя, а вход чувствительного элемента связан с платформой. Устройство компенсации действующей на гидроцилиндр неуравновешенности, присутствующее в структуре каждого гидропривода и предназначенное для обеспечения равенства переходных процессов при движении штока силового гидроцилиндра каждого гидропривода вверх и вниз, выполнено в виде вычислительного устройства и двух параллельно соединенных цепей, состоящих из последовательно соединенных детектора и управляемого усилителя-ограничителя, включенных между сумматором и усилителем мощности, а управляющие входы управляемых усилителей-ограничителей соединены с выходом вычислительного устройства, входы которого соединены с выходами чувствительных элементов всех следящих приводов.
При статических и небольших динамических изменениях моментов неуравновешенности нагрузки, введение устройства компенсации в структуру каждого гидропривода обеспечивает более существенную по сравнению с [1] компенсацию влияния действующей на шток каждого силового гидроцилиндра неуравновешенности, обусловленной весом платформы и полезной нагрузки, что заметно выравнивает переходные процессы гидроприводов.
Однако при значительных динамических изменениях моментов неуравновешенности нагрузки, возникающих при имитации маневренных движений реальных объектов, например, самолета, выполняющего сложное маневрирование или фигуры высшего пилотажа, не удается обеспечить приемлемого равенства переходных процессов гидроприводов и апериодического характера их протекания. Это связано с тем, что в динамическом стенде [5] при выравнивании переходных процессов следящих гидроприводов при их движении по- и против неуравновешенности учитываются лишь текущие положения штоков гидроцилиндров, без учета величины и направления их векторов скоростей и ускорений и не обеспечивается необходимого качества регулирования.
Вследствие этого даже при относительном равенстве переходных процессов следящих приводов возможно и перерегулирование с автоколебаниями, и необоснованно большая длительность переходных процессов. Такое движение штоков силовых гидроцилиндров приводит либо к паразитному «раскачиванию» платформы, либо к большим запаздываниям в отработке управляющих сигналов, в результате у тренирующегося экипажа возникают неадекватные ощущения, препятствующие привитию правильных навыков пилотирования.
Целью предлагаемого изобретения является повышение точности и качества воспроизведения динамическим стендом управляющих воздействий за счет повышения качества регулирования каждого следящего гидропривода, точности и синхронности их работы, т.е. достижения равенства передаточных функций гидроприводов, их частотных характеристик и переходных процессов с апериодическим характером протекания при любых статических и динамических изменениях неуравновешенности нагрузки на каждый гидропривод при любых движениях платформы.
Сущность предлагаемого изобретения заключается в том, что в состав динамического стенда, содержащего платформу с полезной нагрузкой, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных датчика положения штока гидроцилиндра, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра, причем штоки гидроцилиндров попарно с помощью верхних шарниров соединены с платформой, корпусы гидроцилиндров через нижние шарниры соединены с фундаментом, электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен ко второму входу гидроусилителя, а вход датчика положения штока гидроцилиндра связан со штоком гидроцилиндра, дополнительно введены последовательно соединенные блок констант, вычислительное устройство, блок частотных характеристик, а в каждом гидроприводе между сумматором и усилителем мощности установлен регулируемый узел коррекции, первый вход которого подключен к выходу сумматора, а выход - к входу усилителя мощности. В каждом гидроприводе второй вход регулируемого узла коррекции соединен с соответствующим данному гидроприводу выходом блока констант, а третий вход - с соответствующим выходом блока частотных характеристик. Дополнительные входы вычислительного устройства соединены с выходом датчика положения штока гидроцилиндра соответствующего гидропривода.
Вычислительное устройство, а также блок констант и блок частотных характеристик, соединенные с возможностью взаимодействия с включенным в структуру каждого гидропривода регулируемым узлом коррекции, в каждый момент времени обеспечивают высокое качество регулирования, демпфируя «разгруженный» гидропривод и увеличивая добротность «перегруженного» гидропривода, обеспечивая тем самым желаемую идентичность передаточных функций гидроприводов, равенство и апериодический характер переходных процессов с учетом влияния действующей на каждый силовой гидроцилиндр неуравновешенности, изменяющейся в зависимости от текущего положения гидроцилиндра в пространстве, скоростей, ускорений движения его штока, определяемых по совокупности изменения величин перемещений, скоростей и ускорений штоков всех силовых гидроцилиндров с учетом направления их движения.
Технических решений, учитывающих изменение вектора нагрузки на каждый силовой гидроцилиндр динамического стенда в зависимости от их текущего взаимного положения, величины и направления векторов ускорений каждого гидроцилиндра, т.е. динамической нагрузки на каждый гидропривод и обеспечивающих высокое качество регулирования, равенство передаточных функций гидроприводов, их частотных характеристик и переходных процессов с апериодическим характером протекания в патентной и научно-технической литературе не обнаружено, что обеспечивает предлагаемому решению соответствие критерию «изобретательский уровень».
На фигуре 1 приведена структурная схема многостепенного динамического стенда;
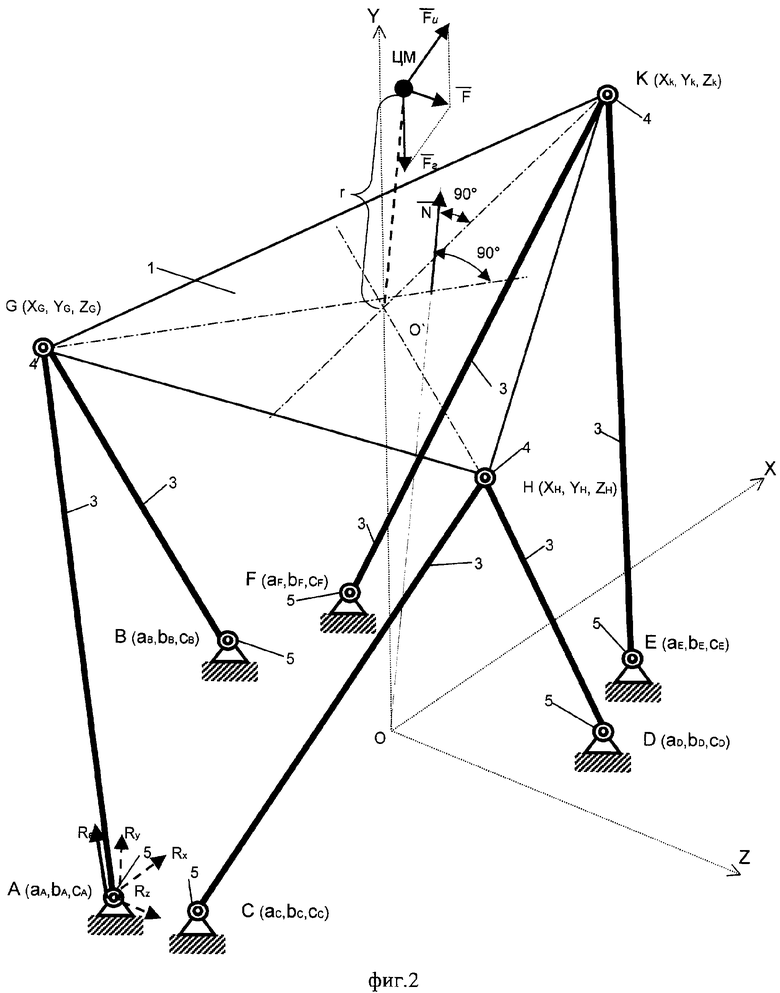
на фигуре 2 - кинематическая схема многостепенного динамического стенда;
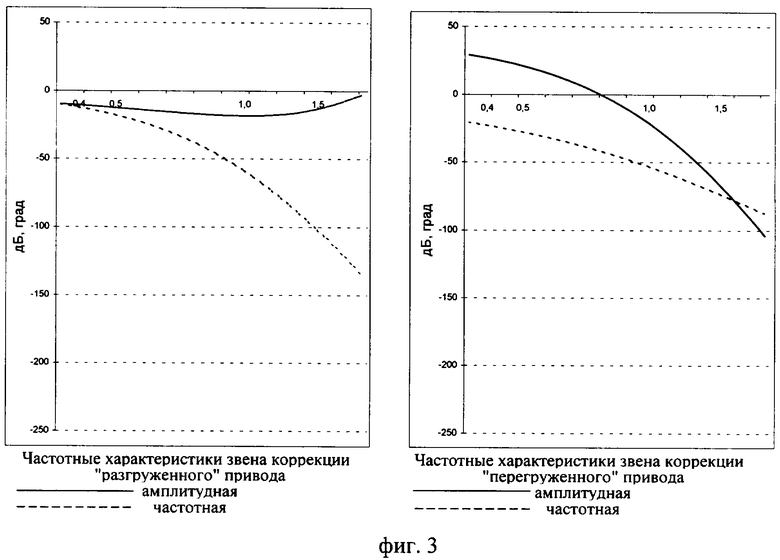
на фигуре 3 - частотные характеристики регулируемого узла коррекции для «разгруженного» и «перегруженного» следящих гидроприводов;
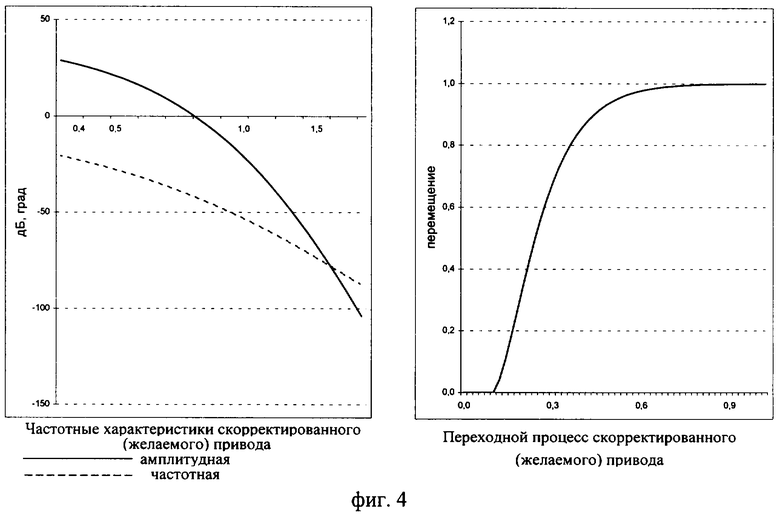
на фигуре 4 - частотные характеристики и переходной процесс скорректированных следящих гидроприводов.
Предлагаемый многостепенной (шестистепенной - фиг.1) динамический стенд состоит из платформы 1, источника гидропитания 2 и нескольких одинаковых следящих гидроприводов по количеству силовых гидроцилиндров 3, штоки которых с помощью верхних шарниров 4 попарно присоединены к платформе 1, а корпуса гидроцилиндров 3 через нижние шарниры 5 прикреплены к фундаменту. Каждый из следящих гидроприводов состоит из последовательно соединенных датчика положения штока гидроцилиндра 6, сумматора 7, усилителя мощности 8, гидроусилителя 9 и силового гидроцилиндра 3.
В состав динамического стенда введены последовательно соединенные блок констант 10, вычислительное устройство 11 и блок частотных характеристик 12. В структуру каждого гидропривода между сумматором 7 и усилителем мощности 8 введен регулируемый узел коррекции 13, первый вход которого подключен к выходу сумматора 7, а выход соединен с входом усилителя мощности 8. Второй вход регулируемого узла коррекции 13 соединен с соответствующим данному гидроприводу выходом блока констант 10, третий вход - с соответствующим выходом блока частотных характеристик 12. Дополнительные входы вычислительного устройства 11, по количеству гидроцилиндров 3, соединены с соответствующими выходами датчиков положения штоков гидроцилиндров 6.
Динамический стенд работает следующим образом:
При движении подвижной платформы 1, в зависимости от текущих положений в пространстве гидроцилиндров, неуравновешенности нагрузки, действующей на них и параметров движения их штоков, изменяется передаточная функция каждого гидропривода. Причем передаточные функции сумматора 7, усилителя мощности 8, гидроусилителя 9, датчика положения штока гидроцилиндра 6, входящих в состав каждого гидропривода, не изменяются при перемещениях платформы динамического стенда в пространстве, изменяется только передаточная функция гидроцилиндра [2, стр.214], [3]

или
где kгц - коэффициент усиления гидроцилиндра,
 - обобщенная постоянная времени,
- обобщенная постоянная времени,
 - коэффициент затухания,
- коэффициент затухания,
p - оператор Лапласа,
Тг - гидравлическая постоянная времени,
Тм - механическая постоянная времени.
Tг=const, т.к. зависит от не изменяющихся величин - объемного модуля упругости рабочей жидкости и ее объема и т.п. [2, стр.200].
где J=ΔmR2=var - момент инерции приводного звена [6];
r=const - приведенное значение утечек рабочей жидкости,
km=var - коэффициент момента;
Δm=var - текущее значение массы, приведенной на шток i-го гидроцилиндра, определяемое как функция реакции опоры Ri;
R=var - радиус вращения центра масс, приведенного на шток i-го гидроцилиндра, определяемое как функция длины гидроцилиндра;
При движении подвижной платформы 1, в каждый момент времени с выходов блока 10 констант на соответствующие входы вычислительного устройства 11 поступают значения координат нижних шарниров 5 и расстояний между верхними шарнирами 4, а на остальные входы - текущие значения сигналов с датчиков 6 положения штоков гидроцилиндров 3. Вычислительное устройство 11 вычисляет фактическое положение гидроцилиндров 3 (величины выдвижения их штоков и углы наклона к горизонтальной плоскости) и положение подвижной платформы относительно начальной системы координат, а также линейные и угловые ускорения верхних шарниров 4 и величины реакций нижних шарниров 5. Вычисленные параметры с выходов вычислительного устройства 11 поступают на входы блока 12 частотных характеристик, моделирующего имеющиеся амплитудные и фазовые частотные характеристики каждого гидропривода в реальном масштабе времени, которые с его выходов поступают на третий вход регулируемого узла 13 коррекции соответствующего гидропривода, а на второй вход регулируемого узла 13 коррекции - с выходов блока 10 констант поступают желаемые амплитудно-фазовые частотные характеристики. В регулируемом узле 13 коррекции каждого гидропривода сравниваются параметры имеющейся и желаемой амплитудно-фазовых частотных характеристик соответствующего гидропривода и по результатам моделируются параметры (индивидуальные для каждого гидропривода) частотных характеристик регулируемого узла 13 коррекции. При увеличении нагрузки на шток гидроцилиндра 3 имеющаяся механическая постоянная времени гидроцилиндра Тми возрастает и начинает превалировать форсирующее воздействие регулируемого узла 13 коррекции для увеличения добротности гидропривода; при уменьшении нагрузки на шток гидроцилиндра 3 величина Тми уменьшается и соответственно начинает превалировать демпфирующее воздействие; при оптимальной величине нагрузки на шток гидроцилиндра 3 величина имеющейся механической постоянной времени Тми становится равной величине желаемой механической постоянной времени Тмж и регулируемый узел 13 коррекции работает как усилитель с коэффициентом передачи, равным 1; при этом во всех случаях качество следящего гидропривода остается оптимальным.
Таким образом, для компенсации несинхронностей, определяются в реальном масштабе времени возникающие фактические значения реакций Ri, нижних шарниров 5, которые зависят от величины и направления суммарного усилия  , приложенного к центру масс ЦМ (фиг.2) и представляющего собой геометрическую сумму [7. стр.20]:
, приложенного к центру масс ЦМ (фиг.2) и представляющего собой геометрическую сумму [7. стр.20]:

где  - инерциальная сила,
- инерциальная сила,
 - ускорение, действующее в ЦМ,
- ускорение, действующее в ЦМ,
 - гравитационная сила тяжести,
- гравитационная сила тяжести,
 =9,82 м/с2 - ускорение свободного падения,
=9,82 м/с2 - ускорение свободного падения,
т.е, 
Т.к. полезная нагрузка жестко зафиксирована на платформе, то их суммарная масса m расположена в центре масс ЦМ (фиг.2) на расстоянии r от геометрического центра О' плоскости платформы. Начало координат располагается в плоскости, проходящей через центры нижних шарниров 5, продольная ОХ и поперечная OZ оси лежат в той же плоскости, вертикальная ось OY в начальном (исходном) положении платформы 1 проходит через центр масс ЦМ и точку О'. Таким образом, нормальный вектор  плоскости GHK коллинеарен вектору
плоскости GHK коллинеарен вектору  :
:

Кинематическая схема (фиг.2) представляет собой пространственную систему четырех связанных плоскостей:
- неизменяемой формы GHK,
- изменяемой формы (за счет изменения длины гидроцилиндров 3): AGB, CHD, FKE,
где точками G, Н и К обозначены центры верхних шарниров 4 с переменными координатами в системе OXYZ соответственно (хG, yG, zG), (хH, yH, zH) и (хK, yK, zK), а центры нижних шарниров 5 точками А, В, С, D, Е, F с неизменными координатами соответственно (аA, bA, cA)...(аF, bF, cF).
Текущие значения длины i-го (i=1...6) гидроцилиндра 3, т.е. сигналы с датчиков 6 положения их штоков и неизменные значения расстояний между центрами верхних шарниров 4 Lm, однозначно связывают вычисляемые текущие значения координат верхних шарниров 4:

Численное решение уравнений (6) производится в вычислительном устройстве 11, на входы которого с соответствующих выходов блока 10 констант поступают значения координат (ai, bi, сi) нижних шарниров 5 и расстояний Lm между верхними шарнирами 4, а на его дополнительные входы (с выходов соответствующих датчиков положения штоков гидроцилиндров 6) значения si.
Далее в вычислительном устройстве 11 по текущим значениям координат центров верхних шарниров 4 определяется уравнение плоскости GHK в виде матрицы [8, стр.160]:
и после математических преобразований которой получается уравнение плоскости [8, стр.167]:
xcosα+ycosβ+zcosγ-N=0
где N - нормальный вектор - перпендикуляр к плоскости GHK из начала координат О' (фиг.2),
α, β, и γ - соответственно углы между нормальным вектором N и положительными направлениями осей OX, OY и OZ.
В соответствии с (5) векторы  и коллинеарны, следовательно, углы между вектором усилия r и осями OX, OY и OZ также соответственно равны α, β, и γ, исходя из чего, в вычислительном устройстве 11 определяются составляющие нагрузки Fx, Fy, Fz вдоль и моментов Мх, My, Мz вокруг ортогональных осей OXYZ, воздействующие на гидроцилиндр 3.
и коллинеарны, следовательно, углы между вектором усилия r и осями OX, OY и OZ также соответственно равны α, β, и γ, исходя из чего, в вычислительном устройстве 11 определяются составляющие нагрузки Fx, Fy, Fz вдоль и моментов Мх, My, Мz вокруг ортогональных осей OXYZ, воздействующие на гидроцилиндр 3.
Текущее значение ускорения  (4) определяется в вычислительном устройстве 11 по соответствующим изменениям положений координат верхних шарниров 4 (хn, yn, Zn) путем вычисления в вычислительном устройстве 11 их вторых производных.
(4) определяется в вычислительном устройстве 11 по соответствующим изменениям положений координат верхних шарниров 4 (хn, yn, Zn) путем вычисления в вычислительном устройстве 11 их вторых производных.
Усилие уравновешивается реакциями Ri нижних шарниров 5 [8], которые направлены вдоль осей гидроцилиндров 3 (фиг.2).
Шесть реакций (RA...RF) нижних шарниров 5, вычисляемые путем численного решения статически определенной задачи [7, стр.191]:

с выходов вычислительного устройства 11 поступают на входы блока 12 частотных характеристик, где в соответствии с уравнением (1) определяется текущее значение имеющейся механической постоянной времени Тми и моделируется значение имеющейся передаточной функции W(p)u.
Для приведения результирующих передаточных функций каждого следящего гидропривода к желаемому единообразию узел коррекции 13 выполнен регулируемым и представляет из себя звено с передаточной функцией W(p)к, формирующее желаемую передаточную функцию W(p)ж, значение которой с выхода блока 10 констант поступает на второй вход регулируемого узла 13 коррекции.
Из уравнения (1) видно, что в зависимости от параметров движения штока гидроцилиндра и его положения в пространстве изменяется только имеющаяся составляющая
 ,
,
которая корректируется до желаемой формы W(р)ж путем последовательного включения корректирующего звена W(p)к, [9] т.е.
W(p)ж=W(р)uW(p)k,
следовательно:

гдех(р) - воздействующая величина,
у(р) - выходная величина,
На фиг.3 в качестве примера приведены экспериментальные частотные характеристики реализуемых в регулируемых узлах 13 коррекции корректирующих звеньев для случаев «разгруженного» привода (Ri>Rном) и «перегруженного» привода (Ri<Rном), откуда видно, что «разгруженный» привод несколько демпфируется, а для «перегруженного» привода увеличивается его добротность, вследствие чего результирующие частотные характеристики в обоих случаях приобретают устойчивый вид, приведенный на фиг.4, а график переходного процесса имеет апериодический характер, идентичный для всех приводов, что повышает точность отработки задаваемых параметров движения подвижной платформы 1, устраняет фоновые (паразитные) движения, в результате чего повышается точность и качество воспроизведения динамическим стендом управляющих воздействий и соответственно увеличиваются обучающие возможности тренажера в целом.
Источники информации
1. КТС ТУ-204, Техническое описание, ПКБМ, г.Пенза.
2. Гамынин Н.С., Основы следящего гидравлического привода, М., Оборонгиз, 1962 г., стр.200, 214.
3. Безбогов А.А., Дубовый Л.М., Зобков П.П., Клюев Б.В., Современные авиационные тренажеры, Часть 3., Моделирование акселерационной обстановки, Издание РВВАИУ им. Я.Алксниса, Рига, 1988 г., стр.45.
4. Чупраков Ю.И., Гидропривод и средства гидроавтоматики, М., Машиностроение, 1979 г., стр.140.
5. Жуков А.А., Смирнов Б.А., Тимаков В.М., Федоров B.C., патент на изобретение RU №2129305, С1, от 27.12.1996 г., МПК G09B /08, опубл. 20.04.1999 г. (прототип).
6. Кухлинг X., Справочник по физике, Перевод с немецкого под редакцией Лейкина Е.М., изд. 2-е., М., Мир, 1985 г., стр.96.
7. Добронравов В.В., Никитин Н.Н., Дворников А.Л., Курс теоретической механики, изд. 2-е, М., Высшая школа, 1968 г., стр.20, 91.
8. Выгодский М.Я., Справочник по высшей математике, М., Наука, 1976 г., стр.160, 167.
9. Иващенко Н.Н., Автоматическое регулирование, М., Машиностроение, 1978 г., стр.273.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2004 |
|
RU2259597C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| ДИНАМИЧЕСКИЙ СТЕНД | 2005 |
|
RU2285959C2 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| ФИЗИЧЕСКАЯ МОДЕЛЬ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2224295C2 |
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
Изобретение относится к области тренажеростроения и может быть использовано в комплексе полунатурного моделирования условий полета при тренировках и обучении экипажей самолетов и вертолетов. Устройство содержит платформу с полезной нагрузкой, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных датчика положения штока гидроцилиндра, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра. Штоки гидроцилиндров попарно с помощью верхних шарниров соединены с платформой, корпусы гидроцилиндров через нижние шарниры соединены с фундаментом. Электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен ко второму входу гидроусилителя, а вход датчика положения штока гидроцилиндра связан со штоком гидроцилиндра. Дополнительно устройство содержит последовательно соединенные блок констант, вычислительное устройство, блок частотных характеристик, а в каждом гидроприводе между сумматором и усилителем мощности установлен регулируемый узел коррекции, первый вход которого подключен к выходу сумматора, второй вход соединен с соответствующим данному гидроприводу выходом блока констант, третий вход - с соответствующим выходом блока частотных характеристик, а выход регулируемого узла коррекции соединен с входом усилителя мощности. Дополнительные входы вычислительного устройства соединены с выходом датчика положения штока гидроцилиндра соответствующего гидропривода. Технический результат заключается в повышении точности и качества воспроизведения динамическим стендом управляющих воздействий за счет повышения качества регулирования каждого следящего гидропривода при любых движениях платформы. 4 ил.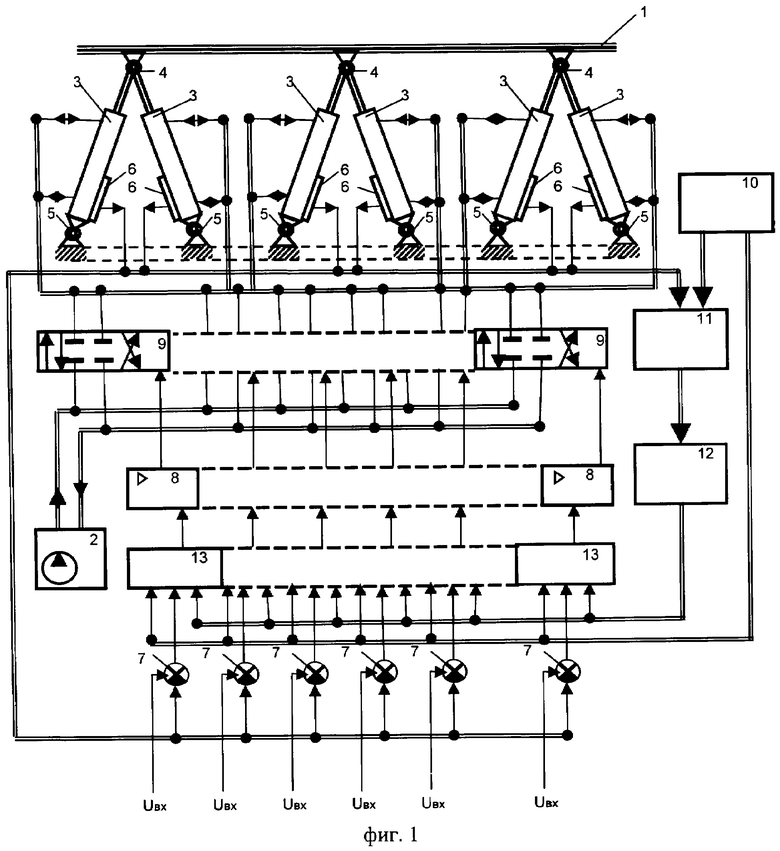
Динамический многостепенной стенд, содержащий платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных датчика положения штока гидроцилиндра, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра, причем штоки гидроцилиндров попарно с помощью верхних шарниров соединены с платформой, корпусы гидроцилиндров с помощью нижних шарниров соединены с фундаментом, электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен ко второму входу гидроусилителя, а вход датчика положения штока гидроцилиндра связан со штоком гидроцилиндра, отличающийся тем, что в состав динамического стенда введены последовательно соединенные блок констант, вычислительное устройство, блок частотных характеристик, а в каждом гидроприводе между сумматором и усилителем мощности установлен регулируемый узел коррекции, первый вход которого подключен к выходу сумматора, второй вход соединен с соответствующим данному гидроприводу выходом блока констант, третий вход - с соответствующим выходом блока частотных характеристик, а выход соединен с входом усилителя мощности, при этом дополнительные входы вычислительного устройства соединены с соответствующим выходом датчика положения штока гидроцилиндра соответствующего гидропривода.
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| Чупраков Ю.И., Гидропривод и средства гидроавтоматики, М., Машиностроение, 1979, с.140 | |||
| Гамынин Н.С., Основы следящего гидравлического привода, М., Оборонгиз, 1962, с.200, 214 | |||
| ТКО-ТЕХШНЕОКАВ БИБЛИОТЕКА | 0 |
|
SU334485A1 |
| Безбогов А.А., Дубовый Л.М., Зобков П.П., Клюев Б.В., Современные авиационные тренажеры, Часть 3, Моделирование акселерационной обстановки, Рига, Издание РВВАИУ им | |||
| Я.Алксниса, 1988, с.45. | |||

