Изобретение относится к авиационной технике и может быть использовано для повышения точности определения на борту летательного аппарата вертикальной скорости и барометрической высоты при полете в условиях нестандартной атмосферы.
Используемые сокращения и термины:
ЛА - летательный аппарат,
СВС - система воздушных сигналов,
ИНС - инерциальная система.
Прототипом изобретения является способ определения барометрической высоты и вертикальной скорости, на котором основано функционирование устройства, описанного в патенте США №4882697 (кл. 364/454) в качестве уровня техники. Он использует комплексирование сигнала вертикального ускорения от ИНС и сигнала приборной барометрической высоты, вычисляемой по сигналу датчика статического давления. Для обработки упомянутых сигналов применяют алгоритм «баро-инерциальный фильтр», структурная схема которого приведена на фигуре 1. На схеме приняты следующие обозначения:
ось Z - ось, направленная вертикально вверх,
AZ, BZ - входные сигналы вертикального ускорения и приборной барометрической высоты,
VZ, PZ - выходные сигналы оценок вертикальной скорости и барометрической высоты фильтра,
 - интеграторы, ⊗ - сумматоры,
- интеграторы, ⊗ - сумматоры,
G1, G2 и G3 - коэффициенты усиления.
С помощью ИНС измеряют вертикальное ускорение, а с помощью датчика статического давления - барометрическую высоту. Выходной сигнал вертикальной скорости VZ формируют интегрированием вертикального ускорения. При этом вводят коррекцию и в качестве интегрируемой величины используют разность между сигналом вертикального ускорения AZ и сигналом коррекции ускорения S7. Выходной сигнал высоты PZ формируют интегрированием разности сигнала вертикальной скорости VZ и сигнала коррекции вертикальной скорости S5. Сигналы коррекции ускорения S7 и вертикальной скорости S5 формируют по сигналу рассогласования Е, представляющего собой разность между сигналами S6 (он же PZ) и BZ. Составляющую S3 сигнала коррекции ускорения S7 и сигнал коррекции вертикальной скорости S5 формируют умножением сигнала рассогласования Е соответственно на коэффициенты усиления G2 и G1. Составляющую S1 сигнала коррекции ускорения S7 формируют интегрированием сигнала Е и умножением результата на коэффициент усиления G3. Сигнал S1 обеспечивает компенсацию постоянной или медленно изменяющейся погрешности в сигнале AZ (т.е. погрешности типа "дрейф нуля акселерометра").
Анализ структурной схемы прототипа показывает, что он обладает следующим недостатком. Для того, чтобы на выходе второго интегратора (блока 225) был сформирован сигнал барометрической высоты (PZ), необходимо, чтобы на его вход поступал сигнал производной по времени от той же барометрической высоты  . Однако, как следует из схемы, вместо сигнала
. Однако, как следует из схемы, вместо сигнала  на вход второго интегратора поступает сигнал вертикальной скорости VZ, представляющий собой производную по времени от геометрической высоты (как результат интегрирования вертикального ускорения AZ в первом интеграторе). Таким образом, известный способ дает ошибку, если расхождение между геометрической и барометрической высотой становится существенным (например, при влиянии метеоусловий).
на вход второго интегратора поступает сигнал вертикальной скорости VZ, представляющий собой производную по времени от геометрической высоты (как результат интегрирования вертикального ускорения AZ в первом интеграторе). Таким образом, известный способ дает ошибку, если расхождение между геометрической и барометрической высотой становится существенным (например, при влиянии метеоусловий).
Задачей изобретения является повышение точности измерения барометрической высоты и вертикальной скорости при полете ЛА в условиях нестандартной атмосферы.
Для решения задачи предлагается способ определения барометрической высоты и вертикальной скорости, в котором измеряют вертикальное ускорение и с помощью датчика статического давления приборную барометрическую высоту, значение вертикальной скорости получают путем интегрирования разности вертикального ускорения и поправки ускорения, значение барометрической высоты получают путем интегрирования разности вертикальной скорости и поправки скорости, разность между полученным таким образом значением барометрической высоты и значением приборной барометрической высоты используют для вычисления упомянутых поправок ускорения и скорости, отличающийся тем, что при определении упомянутой барометрической высоты перед нахождением разности вертикальной скорости и поправки скорости вертикальную скорость умножают на безразмерный множитель, представляющий собой отношение температуры воздуха по стандартной атмосфере к фактической температуре воздуха, измеряемой датчиком температуры.
Изобретение поясняется фигурами.
На фиг.1 изображена структурная схема алгоритма, лежащего в основе известного способа.
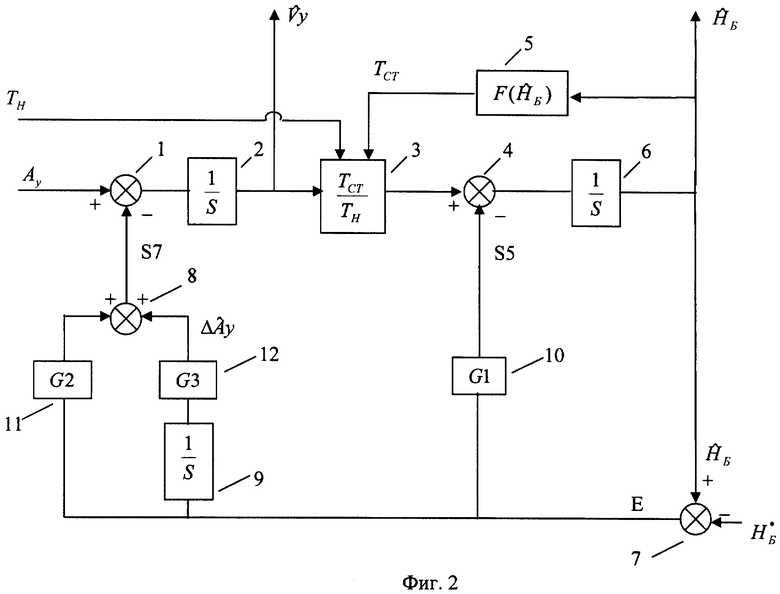
На фиг.2 изображена структурная схема алгоритма, используемого при реализации предлагаемого способа.
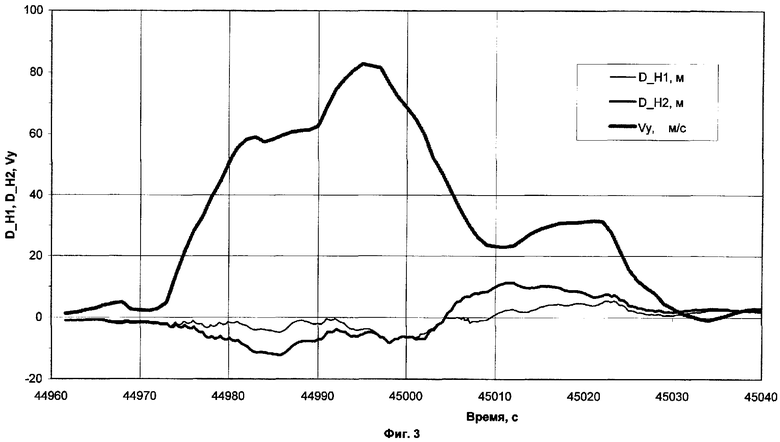
На фиг.3 показаны зависимости погрешностей измерения барометрической высоты предлагаемым и известным способами для фрагмента полета.
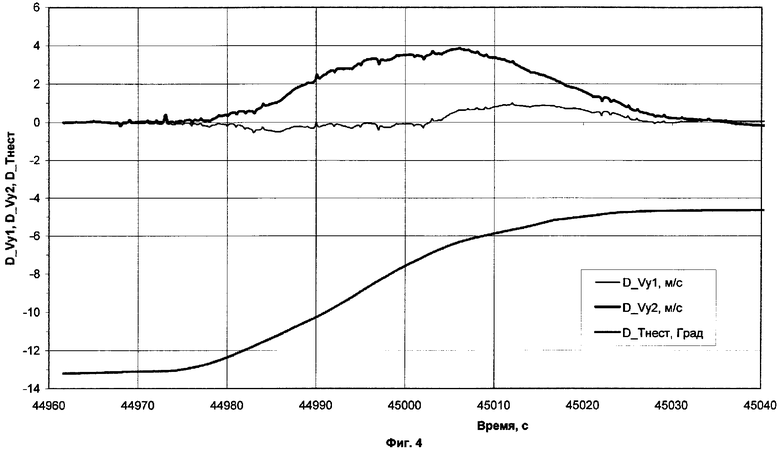
На фиг.4 показаны зависимости погрешностей измерения вертикальной скорости предлагаемым и известным способами для фрагмента полета.
Для того чтобы устранить указанное несоответствие между барометрической и геометрической высотами, сигнал VZ, поступающий на вход второго интегратора, должен быть предварительно преобразован в сигнал  . Необходимая функциональная зависимость для преобразования VZ в
. Необходимая функциональная зависимость для преобразования VZ в  может быть найдена с использованием следующих исходных соотношений:
может быть найдена с использованием следующих исходных соотношений:
- уравнение статики атмосферы в дифференциальном виде
где P, ТН - давление и температура воздуха (по шкале Кельвина),
h - геометрическая высота,
R=287,05287 Дж·кг-1·К-1 - удельная газовая постоянная,
g - ускорение свободного падения (зависит от широты и высоты ЛА);
- дифференциальное уравнение, используемое в авиации для формирования барометрической высоты полета ЛА в следующем виде
где НБ - барометрическая высота полета ЛА,
gС=9,80665 м/с2 - стандартное ускорение свободного падения,
ТСТ - температура воздуха по стандартной атмосфере.
Уравнение (1) следует из формул (1) и (2), приведенных в приложении к ГОСТ 4401-81, стр.171, раздел "Уравнения статики атмосферы и состояния идеального газа", уравнение (2) для формирования барометрической высоты полета ЛА (НБ) получается из уравнения (1) заменой параметра g на gС и параметра ТН на ТСТ.
Температуру воздуха по стандартной атмосфере (ТСТ) определяют в зависимости от барометрической высоты (см. там же стр.174, 175, раздел "Температура, вертикальный градиент температуры") следующим образом (до высоты 20000 м):


Из уравнений (1) и (2) путем исключения давления получается следующее уравнение, связывающее производные по времени от геометрической и барометрической высот:
В уравнении (5) отношение  в контексте рассмотренной задачи можно заменить единицей ввиду того, что его отличие от единицы является малым
в контексте рассмотренной задачи можно заменить единицей ввиду того, что его отличие от единицы является малым  до высоты 20000 м на всех географических широтах). С учетом сказанного, а также принимая во внимание то обстоятельство, что производная по времени от геометрической высоты
до высоты 20000 м на всех географических широтах). С учетом сказанного, а также принимая во внимание то обстоятельство, что производная по времени от геометрической высоты  представляет собой вертикальную скорость ЛА (Vy в принятых в нашей стране обозначениях, т.к. ось, направленная вертикально вверх, обозначается у), уравнение (5) преобразуется к следующему виду:
представляет собой вертикальную скорость ЛА (Vy в принятых в нашей стране обозначениях, т.к. ось, направленная вертикально вверх, обозначается у), уравнение (5) преобразуется к следующему виду:
Таким образом, для преобразования Vy в  сигнал Vy должен быть умножен на безразмерный множитель
сигнал Vy должен быть умножен на безразмерный множитель  , представляющий собой отношение температуры воздуха по стандартной атмосфере к температуре воздуха на текущей высоте полета, измеряемой датчиком температуры. Отсутствие такого множителя приводит к увеличению погрешностей в сигналах барометрической высоты и вертикальной скорости при полете в условиях нестандартной атмосферы, т.е. в условиях, когда температура воздуха ТН на текущей высоте полета будет значительно отличаться от температуры воздуха по стандартной атмосфере ТСТ.
, представляющий собой отношение температуры воздуха по стандартной атмосфере к температуре воздуха на текущей высоте полета, измеряемой датчиком температуры. Отсутствие такого множителя приводит к увеличению погрешностей в сигналах барометрической высоты и вертикальной скорости при полете в условиях нестандартной атмосферы, т.е. в условиях, когда температура воздуха ТН на текущей высоте полета будет значительно отличаться от температуры воздуха по стандартной атмосфере ТСТ.
Предлагаемый способ заключается в следующем (см. фиг.2).
Измеряют фактическую температуру воздуха ТН, вертикальное ускорение Ау и приборную барометрическую высоту  , причем
, причем  измеряют с помощью датчика статического давления (см. приложение к ГОСТ 3295-73, стр.74, формулы 1.1.1.-1.2.2. для вычисления геопотенциальной высоты по давлению). Из величины вертикального ускорения Ау вычитают (в блоке 1) поправку ускорения S7 и путем интегрирования этой разности (в блоке 2) получают значение вертикальной скорости
измеряют с помощью датчика статического давления (см. приложение к ГОСТ 3295-73, стр.74, формулы 1.1.1.-1.2.2. для вычисления геопотенциальной высоты по давлению). Из величины вертикального ускорения Ау вычитают (в блоке 1) поправку ускорения S7 и путем интегрирования этой разности (в блоке 2) получают значение вертикальной скорости  , которое затем умножают (масштабируют) на множитель (формируемый в блоке 3). Из результата умножения (т.е. из масштабированной вертикальной скорости) вычитают поправку вертикальной скорости S5 (в блоке 4) и путем интегрирования разности (в блоке 6) получают выходной сигнал (значение) барометрической высоты
, которое затем умножают (масштабируют) на множитель (формируемый в блоке 3). Из результата умножения (т.е. из масштабированной вертикальной скорости) вычитают поправку вертикальной скорости S5 (в блоке 4) и путем интегрирования разности (в блоке 6) получают выходной сигнал (значение) барометрической высоты  .
.
Поправки ускорения S7 и вертикальной скорости S5 находят с использованием формируемой в блоке 7 разности высот Е между вычисляемой барометрической высотой и приборной барометрической высотой . При этом поправку ускорения S7 находят в блоке 8 как сумму умноженной на коэффициент G2 разности высот Е и умноженного на коэффициент G3 результата интегрирования в блоке 9 той же разности высот, в качестве поправки вертикальной скорости S5 принимают умноженную на коэффициент G1 ту же разность высот Е.
Температуру воздуха по стандартной атмосфере ТСТ вычисляют в блоке 5 по формулам (3) и (4) с помощью функции  , обеспечивающей вычисление ТСТ.
, обеспечивающей вычисление ТСТ.
Способ может быть реализован как с помощью аналогового, так и цифрового устройства.
Если используется аналоговое устройство, оно должно реализовывать схему, изображенную на фиг.2. Как видно из этой схемы, на один из входов блока 3, осуществляющего вычисление множителя , подается формируемая блоком 5 функция определяемой барометрической высоты . Таким образом, хотя до момента определения значение барометрической высоты еще не известно, из-за обратной связи, сформированной замкнутой цепочкой блоков 3-4-6-5-3, для определения множителя используется величина определяемой барометрической высоты .
Аналогичные обратные связи имеют место при определении поправок скорости и ускорения. Поправку скорости находят благодаря обратной связи, образованной цепочкой блоков 4-6-7-10-4, а поправку ускорения - обратной связи, образованной цепочкой блоков 1-2-3-4-6-7-(11 и 9-12)-8-1.
Если используется цифровое устройство (компьютер), интегрирование выполняется с некоторым временным шагом, начиная с момента, например, взлета летательного аппарата. При этом процедуры интегрирования могут быть выполнены на основе следующих итерационных формул (эти формулы реализуют схему, изображенную на фиг.2), связывающих значения параметров барометрической высоты , вертикальной скорости и необходимой для этих целей интегральной поправки ускорения  (обозначаемые далее
(обозначаемые далее  ,
,  ,
,  ) в равноотстоящие друг от друга на интервал времени τ дискретные моменты времени tК и tК+1 (
) в равноотстоящие друг от друга на интервал времени τ дискретные моменты времени tК и tК+1 ( ,
,  ,
,  ):
):



где PtСТ - прогноз температуры воздуха по стандартной атмосфере, вычисляемый по приведенным далее формулам,
PhБ - прогноз барометрической высоты, вычисляемый по приведенной далее формуле,
τ=tК+1-tК - интервал времени.
Для выполнения цифрового интегрирования по формулам (7), (8) и (9) приближенно задают начальные значения параметров  ,
,  ,
,  на нулевой вычислительной итерации. Вычисления значения параметров
на нулевой вычислительной итерации. Вычисления значения параметров  ,
,  ,
,  на (к+1)-й итерации (при к=1,2,3,...) выполняют с использованием значений этих параметров на предыдущей к-й итерации, измерений температуры наружного воздуха
на (к+1)-й итерации (при к=1,2,3,...) выполняют с использованием значений этих параметров на предыдущей к-й итерации, измерений температуры наружного воздуха  , вертикального ускорения Аук и приборной барометрической высоты
, вертикального ускорения Аук и приборной барометрической высоты  , a также с использованием прогнозов температуры воздуха по стандартной атмосфере
, a также с использованием прогнозов температуры воздуха по стандартной атмосфере  и барометрической высоты
и барометрической высоты  , предварительно вычисленных по следующим формулам:
, предварительно вычисленных по следующим формулам:
 , при
, при 
 при
при 

Т.о., при использовании цифрового устройства осуществляется достаточно точная для целей определения множителя оценка прогнозного значения барометрической высоты, что практически равноценно описанной выше обратной связи в аналоговом устройстве.
Сравнение известного и предлагаемого способов в условиях нестандартной атмосферы отражено на графиках, приведенных на фиг.3 и 4, следующими параметрами:
D_H1, D_Vy1 - погрешности измерения барометрической высоты и вертикальной скорости предлагаемым способом,
D_H2, D_Vy2 - погрешности измерения барометрической высоты и вертикальной скорости способом, реализуемым в прототипе,
Vy - вертикальная скорость полета ЛА,
D_Тнест - разность температур ТСТ-ТН, принимаемая за меру нестандартности атмосферы.
Из фиг.3 и 4 следует, что отсутствие безразмерного множителя в известном способе приводит (при относительно небольшой нестандартности атмосферы, достигающей примерно 13 градусов) к погрешности измерения вертикальной скорости ˜4 м/с, барометрической высоты ˜12 м (по модулю). При нестандартности атмосферы в пределах 20...30 градусов (что достаточно часто имеет место в реальных условиях) ожидаемое значение погрешности измерения вертикальной скорости на аналогичных режимах полета ЛА достигнет до 10...15 м/с. То есть погрешности определения упомянутых параметров уменьшаются (по сравнению с приведенными погрешностями для прототипа) до значений 6 м по высоте (параметр D_H1 на фиг.3) и 0,9 м/с по вертикальной скорости (параметр D_Vyl на фиг.4) на том же режиме полета ЛА.
Таким образом, предлагаемый способ позволяет повысить точность определения барометрической высоты и вертикальной скорости в условиях полета ЛА в нестандартной атмосфере.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265855C1 |
| Способ определения барометрической высоты летательного аппарата в полете с использованием бортовых спутниковых навигационных приемников и авиационных метеорологических прогнозов | 2024 |
|
RU2824733C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ ПОЛЕТА | 1991 |
|
RU2042200C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ МОНИТОРИНГА ВЫДЕРЖИВАНИЯ ВЫСОТЫ ЭШЕЛОНА ПОЛЕТА | 2008 |
|
RU2390793C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
Изобретение относится к авиационной технике. Способ заключается в том, что измеряют вертикальное ускорение и с помощью датчика статического давления приборную барометрическую высоту, вертикальную скорость получают интегрированием разности вертикального ускорения и поправки ускорения, барометрическую высоту - интегрированием разности вертикальной скорости и поправки скорости, разность между вычисленной барометрической высотой и приборной барометрической высотой используют для вычисления упомянутых поправок, при этом вертикальную скорость умножают на безразмерный множитель, равный отношению температуры воздуха по стандартной атмосфере, вычисленной по значению барометрической высоты, к измеренной температуре воздуха. Изобретение позволяет повысить точность определения барометрической высоты и вертикальной скорости в условиях летательного аппарата в нестандартной атмосфере. 4 ил.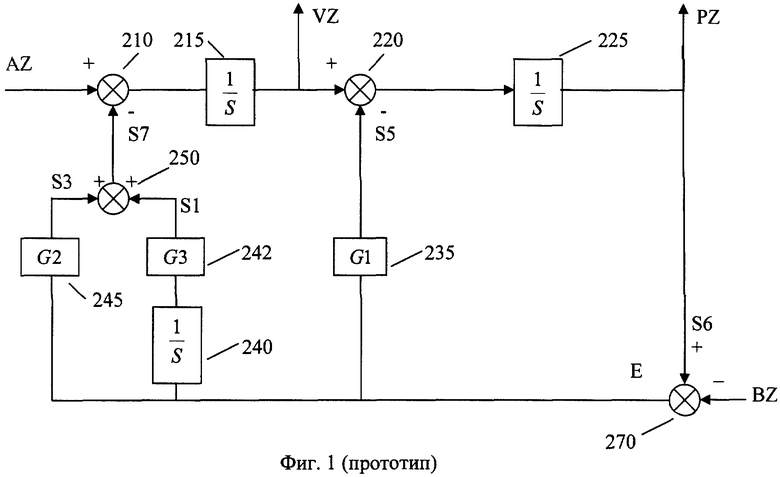
Способ определения барометрической высоты и вертикальной скорости, при котором измеряют вертикальное ускорение и с помощью датчика статического давления приборную барометрическую высоту, значение вертикальной скорости получают путем интегрирования разности вертикального ускорения и поправки ускорения, значение барометрической высоты получают путем интегрирования разности вертикальной скорости и поправки скорости, разность между полученным таким образом значением барометрической высоты и значением приборной барометрической высоты используют для вычисления упомянутых поправок ускорения и скорости, отличающийся тем, что при определении упомянутой барометрической высоты перед нахождением разности вертикальной скорости и поправки скорости вертикальную скорость умножают на безразмерный множитель, представляющий собой отношение температуры воздуха по стандартной атмосфере к фактической температуре воздуха, измеряемой датчиком температуры.
| US 4882697 А, 21.11.1989 | |||
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| СИСТЕМА КОРРЕКЦИИ ВЫХОДНОЙ ИНФОРМАЦИИ АВИАЦИОННЫХ ВЫСОТОМЕРОВ | 1980 |
|
SU946336A1 |
| СПОСОБ КОНТРОЛЯ ИЗМЕРИТЕЛЯ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079142C1 |
| WO 00/70354 A1, 23.11.2000 | |||
| US 4008618 А, 22.02.1977. | |||

