Изобретение относится к области авиастроения, в частности к системам управления летательных аппаратов с секционированными аэродинамическими поверхностями.
Целью изобретения является повышение надежности системы и улучшение эксплуатационных характеристик при отказах в ней.
На чертеже приведена схема описываемой системы.
Система управления летательного аппарата с двумя секциями 1 и 2 руля и двумя каналами управления (электродистанционным и механическим) содержит гидроприводы 3 и 4 секции руля, входные звенья которых соединены между собой механической связью ответвлением 5 механической проводки с соединительным устройством (механизмом 6 разъединения) и с каркасом летательного аппарата через центрирующие пружины 7, два рычага 8 и 9 управления, соединенные между собой механической связью 10 через механизм 11 разъединения.
Механический канал управления выполнен в виде механической проводки 12, соединяющей рычаг 8 с входным звеном гидропривода 3 секции 1 руля и через ответвление 5 с гидроприводом 4 секции 2 руля.
Электродистанционный канал включает два независимых подканала, состоящих из соединенных электроцепями датчиков 13 и 14 усилий, встроенных в рычаги 8 и 9 управления, вычислителей 15 и 16 и сервоприводов 17 и 18 с устройствами 19 и 20 соответственно ограничения усилий и отключения.
С рычагом 9 соединена загрузочная пружина 21, связанная со штоком электропривода 22 системы триммирования, связанного с датчиками 23 положения системы триммирования и посредством электроцепей с переключателями 24 на рычагах управления. Датчики 23 положения связаны электроцепями с вычислителями 15 и 16.
Сервопривод 18 одного подканала электродистанционного канала управления подключен параллельно к механической проводке 12 к гидроприводу 3, а сервопривод 17 другого подканала через ответвление 5 механической проводки 12 к входному звену гидропривода 4.
Система управления работает следующим образом.
При приложении летчиком усилия к рычагу 9 (или 8) сервоприводы 17 и 18 по сигналам с датчиков 14 (13) перемещают механическую проводку 12 и рычаги управления на величину, соответствующую приложенному усилию (по соответствующей загрузочной характеристике). Соответственно перемещению рычагов отклоняются секции 1 и 2.
При отказе в подканале электродистанционного канала сигнал положения выходного звена сервопривода (например, сервопривода 17) этого подканала и выходной сигнал его электронной модели (в вычислителе 16) расходятся. Когда это расхождение достигает определенного значения система контроля подканала в вычислителе 16 отключает неисправный сервопривод от механической проводки системы управления с помощью устройства 20 отключения. Характеристики управляемости сохраняются за счет работы исправного подканала. При отказе обоих электродистанционных подканалов управление обеспечивается за счет работы механического канала управления.
При отказе типа заклинивания какого-либо подвижного элемента системы управления летчик с помощью механизмов 6 и 11 разъединяет рычаги 8 и 9 и гидроприводы 3 и 4 секций руля и в дальнейшем управление осуществляется от рычага, связанного с исправной частью системы.
При заклинивании подвижного элемента в ответвлении 5 механической проводки (от сервопривода 17 до секции 2 и механизма 6) дальнейшее управление осуществляется от рычага 8 с помощью сервопривода 18, подключенного к механической проводке 12, при этом трение и инерционность в проводке и сопротивление центрирующей пружины 7 преодолеваются сервоприводом 18, чем обеспечивается удобство управления с номинальной загрузкой рычага 8.
При отказе типа самохода сервопривода (например, сервопривода 17) исключено самопроизвольное перемещение секций 1 и 2 вследствие того, что другой сервопривод 18 исправного подканала с полностью независимыми цепями, управления и создаваемым усилием, равным по величине усилию отказавшего сервопривода, препятствует последнему, так как выходные звенья этих сервоприводов соединены жесткой механической связью через механизм 6. В этом случае при управлении усилие летчика складывается с усилием исправного сервопривода 18, заставляя выходное звено отказавшего сервопривода 17 перемещаться в соответствии с перемещением рычага 8 и 9 за счет срабатывания устройства 19 отказавшего сервопривода.
Поскольку датчики 13 и 14 усилий встроены в рычаги управления, то паразитные сигналы, поступающие при неисправностях в системе от датчиков в вычислители 15 и 16, существенно уменьшены, что также повышает надежность и улучшает эксплуатационные характеристики системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1372816A1 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ УЧЕБНО-ТРЕНИРОВОЧНОГО САМОЛЕТА | 1993 |
|
RU2093419C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАКРЫЛКАМИ САМОЛЕТА | 1992 |
|
RU2065377C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1991 |
|
RU2042574C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| Система дистанционного управления региональным самолётом | 2022 |
|
RU2795074C1 |
Изобретение относится к области авиастроения и позволяет повысить надежность и улучшить эксплуатационные характеристики системы. Система включает рычаги 8 и 9 управления, связанные с гидроприводами 3 и 4 секций 1 и 2 руля посредством механической проводки 12 с ответвлением 5 и механизмами 6 и 11 разъединения, а также с помощью электродистанционного канала. Последний состоит из двух подканалов, включающих датчики 13 и 14 усилий, вычислители 15 и 16 и сервоприводы 17 и 18 с устройствами ограничения усилий 19 и отключения 20. При нормальной работе системы по сигналам датчиков 13 и 14 сервоприводы перемещают через проводку секции 1 и 2. При отказе одного из подканалов его сервопривод отключается соответствующим устройством 20. В случае заклинивания какой -либо части системы она отделяется от исправной части с помощью механизмов 6 и 11. При неисправности одного из сервоприводов его действие пересиливается исправным сервоприводом и пилотом за счет срабатывания устройства 19. 1 ил.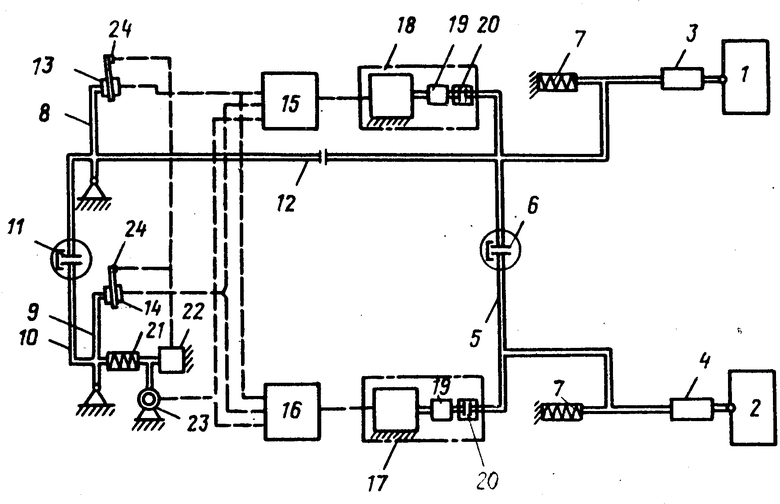
СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С СЕКЦИОНИРОВАННЫМ РУЛЕМ, содержащая два рычага управления, соединенные между собой через механизм разъединения, два канала управления, один из которых выполнен в виде механической проводки, соединенной с одним из рычагов управления и первой секцией руля и связанной через ее ответвление, включающее соединительное устройство, с второй секцией руля, а другой канал выполнен электродистанционным в виде двух независимых подканалов, включающих датчики усилий, вычислители и сервоприводы с устройствами их отключения, причем сервопривод одного подканала соединен с механической проводкой к первой секции руля, а сервопривод другого подканала с ответвлением проводки к второй секции руля, и соединенное с вторым рычагом управления устройства триммирования усилий, включающее датчики его положения, загрузочную пружину и электропривод триммирования, отличающаяся тем, что, с целью повышения ее надежности и улучшения эксплуатационных характеристик при отказах в системе, сервоприводы снабжены устройствами ограничения усилий, соединительное устройство ответвления механической проводки выполнено в виде механизма разъединения, а датчики усилий обоих подканалов электродистанционного канала управления установлены в рычагах управления.
| Авторское свидетельство СССР N 1042281, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
