Изобретение относится к системам управления летательными аппаратами.
Целью изобретения является повышение безопасности полета.
На чертеже представлена блок-схема предлагаемой системы, содержащая рычаг 1 управления, механизм 2 загрузки, кнопку 3 триммирования, блоки 4 триммирования, датчики 5 положения рычага управления (датчики усилий на рычаге управления), вычислители 6 управляющего сигнала, блок электрических датчиков 7 параметров движения летательного аппарата, электрогидравлические сервоприводы 8, пружинные тяги 9, рулевой привод 10, гидравлическое командное устройство 11, первый 12 и второй 13 дифференциальные механизмы, механизм 14 триммирования, блок неэлектрических датчиков 15 параметров движения летательного аппарата, гидравлический сервопривод 16, трубопроводы 17, предварительно сжатую пружинную тягу 18, датчик 19 рассогласования штоков гидравлического и электрогидравлических сервоприводов и выключатель 20.
В системе управления летательного аппарата рычаг 1 управления с кнопкой 3 триммирования механически связан с механизмом 2 загрузки и через последовательно соединенный первый 12 и второй 13 дифференциальные механизмы с гидродистанционной системой управления, состоящей из гидравлического командного устройства 11, вход которого подключен к выходу второго дифференциального механизма 13, а выход с помощью трубопроводов 17 к гидравлическому сервоприводу 16, механизма 14 триммирования, вход которого связан с кнопкой 3 триммирования, блок 15 неэлектрических датчиков параметров движения летательного аппарата, выход которого подключен к второму входу второго дифференциального механизма 13. Рычаг 1 управления связан также с электродистанционной системой управления, состоящей из нескольких автономных идентичных каналов, каждый из которых включает датчик 5 положения рычага 1 управления (датчик усилий на рычаге управления), связанный механически с рычагом 1 управления, выход которого подключен к первому входу вычислителя 6 управляющего сигнала, к второму входу которого через блок 4 триммирования подключена кнопка 3 триммирования, к третьему выход блока электрических датчиков 7 параметров движения летательного аппарата, а выход вычислителя связан с входом электрогидравлического сервопривода 8, связанного через пружинную тягу 9 с золотником рулевого привода 10, датчик 19 рассогласования штоков гидравлического 16 и электрогидравлических 8 сервоприводов, механически связанный с предварительно сжатой пружинной тягой 18, через которую гидравлический сервопривод 16 подключен к золотнику рулевого привода 10 параллельно с электрогидравлическими сервоприводами 8 электродистанционной системы управления. Причем выход датчика 19 рассогласования штоков гидравлического 16 и электрогидравлических 8 сервоприводов через размыкающие контакты выключателя 20, установленного на рычаге 1 управления, подключен к второму входу механизма 14 триммирования, который через второй вход первого дифференциального механизма подключен последовательно к проводке управления гидравлическим командным устройством 11.
Система управления летательного аппарата работает следующим образом.
В основном режиме ручного управления летчик перемещает рычаг 1 управления. Датчик 5 положения (усилий) вырабатывает электрические сигналы, пропорциональные положению (усилиям) на рычаге 1, которые поступают на вычислители 6 управляющего сигнала, где обрабатываются совместно с информацией о параметрах движения летательного аппарата от датчиков 7 параметров движения летательного аппарата.
Вычислители 6 управляющего сигнала выдают сигналы управления, обеспечивающие требуемые характеристики устойчивости и управляемости, на исполнительные электрогидравлические сервоприводы 8, штоки которых перемещаются на величины, пропорциональные этим сигналам. При этом перемещается золотник рулевого привода 10, связанный пружинными тягами 9 со штоками сервоприводов 8.
Гидродистанционный канал управления работает в течение всего полета, одновременно с работой электродистанционной системы или без нее.
В гидродистанционном канале управления перемещение рычага 1 управления, связанного дифференциальными механизмами 12 и 13 с гидравлическим командным устройством 11, приводит к возникновению командного сигнала в виде перепада давления в трубопроводах 17.
По второму входу дифференциальный механизм 12, выполняющий алгебраическое суммирование перемещений, связан с неэлектрическими датчиками 15 параметров движения летательного аппарата.
Закон управления гидродистанционного канала формируется дифференциальным механизмом 12, упрощенным по сравнению с законом управления электродистанционного канала из-за необходимости применения ограниченного количества неэлектрических датчиков и невозможности обработки информации по сложным алгоритмам. Отработка командного сигнала производится исполнительным гидравлическим сервоприводом 16, шток которого связан с предварительно сжатой пружинной тягой 18.
Рассогласование перемещений штоков сервоприводов 8 и 16, возникающее в режиме ручного или автоматического управления вследствие отличия законов управления каналов, приводит к деформации пружинной тяги 18, с которой связан датчик 19 рассогласования штоков гидравлического и электрогидравлических сервоприводов, выдающий сигнал, коммутируемый выключателем 20, в механизм 14 триммирования.
В установившемся полете (когда рычаг 1 управления находится в балансировочном стримированном положении) выключатель 20 замкнут, и сигнал от датчика 19 рассогласования штоков гидравлического и электрогидравлического сервоприводов поступает на вход механизма 14 триммирования и включает его. Перемещение штока механизма 14 триммирования передается через первый 12 и второй 13 дифференциальные механизмы на вход гидравлического командного устройства 11, которое вырабатывает сигнал на перемещение штока гидравлического сервопривода 16 в сторону ликвидации рассогласования положения штоков сервоприводов 16 и 8, если такое рассогласование существует.
При выполнении летчиком маневра летательного аппарата или парирования возмущений, когда рычаг 1 управления отклонен, выключатель 20 отключает сигнал рассогласования на вход механизма 14 триммирования.
В полете на ручном управлении сигналы от длительно прикладываемых к рычагу управления усилий замещаются сигналами механизма 14 триммирования гидродистанционного канала и блоков 4 триммирования электродистанционных каналов, которые включаются от кнопки 3 триммирования.
При активных отказах (невыявляемых встроенных контролем и приводящих к произвольному перемещению штоков сервоприводов 8) двух каналов электродистанционной системы оставшиеся исправные каналы (для трехканальной электродистанционной системы один) и гидродистанционный канал должны обеспечивать приоритет в управлении "пересилить" отказавшие каналы. Исходя из этого соображения выбирают необходимое тяговое усилие гидродистанционного канала. С другой стороны, это усилие должно быть достаточным для перемещения золотника рулевого привода при сопротивлении отключенной электродистанционной системы.
Влияние предварительно сжатой пружинной тяги 18 гидродистанционного канала ограничивает развиваемую гидравлическим сервоприводом 16 тягу потребным усилием гидродистанционного канала.
В резервном режиме ручного управления перемещение рулевой поверхности осуществляется только от гидродистанционного канала управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ УЧЕБНО-ТРЕНИРОВОЧНОГО САМОЛЕТА | 1993 |
|
RU2093419C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С СЕКЦИОНИРОВАННЫМ РУЛЕМ | 1988 |
|
SU1596623A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1991 |
|
RU2042574C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1989 |
|
SU1601907A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ СЛЕДЯЩЕГО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271479C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
Изобретение относится к системам управления летательными аппаратами. Целью изобретения является повышение безопасности полета. В систему управления летательного аппарата, содержащую рычаг 1 управления, механизм 2 загрузки, кнопку 3 триммирования, электродистанционную систему управления (блоки 4 - 9), рулевой привод 10, гидродистанционную систему управления (блоки 11-17), введены предварительно сжатая пружинная тяга 18, механически связанный с ней датчик 19 рассогласования штоков гидравлического 16 и электрогидравлического 8 сервоприводов и выключатель 20, за счет чего при ручном и автоматическом управлении обеспечивается согласование положений штоков сервоприводов электродистанционной и гидродистанционной систем управления. 1 ил.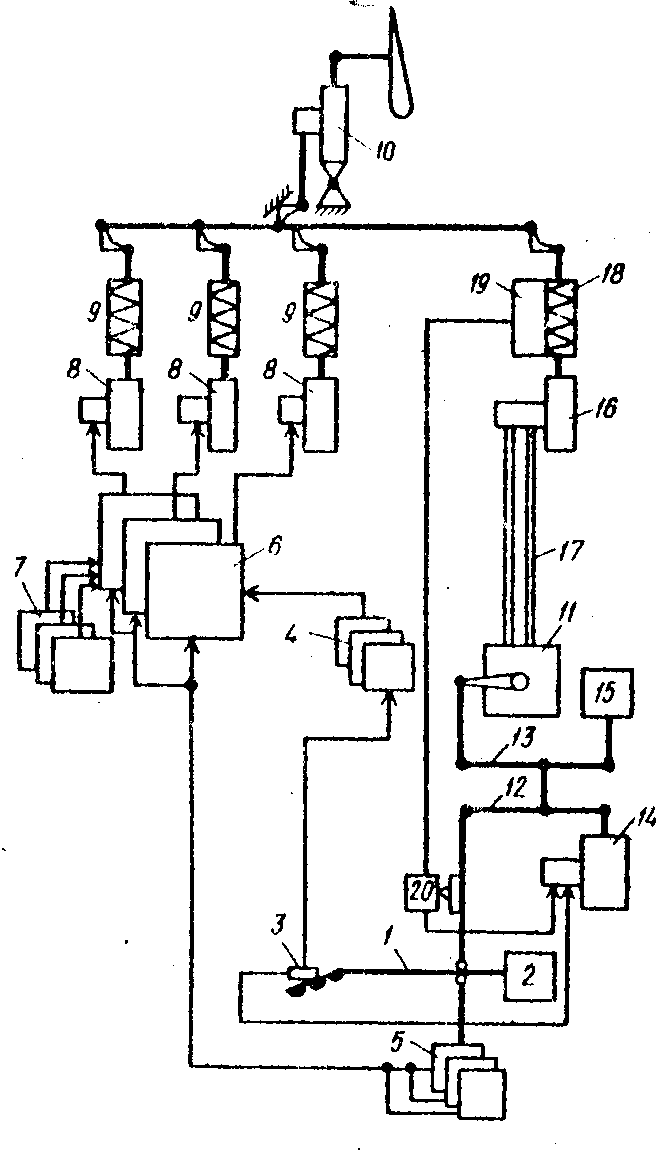
СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащая рычаг управления с кнопкой триммирования, механически связанный с механизмом загрузки и через последовательно соединенные первый и второй дифференциальные механизмы с гидродистанционной системой управления, состоящей из гидравлического командного устройства, вход которого подключен к выходу второго дифференциального механизма, а выход с помощью трубопроводов к гидравлическому сервоприводу механизма триммирования, вход которого связан с кнопкой триммирования, блока неэлектрических датчиков параметров движения летательного аппарата, выход которого подключен к второму входу второго дифференциального механизма, а также электродистанционную систему управления, состоящую из нескольких автономных идентичных каналов, каждый из которых включает датчик положения рычага управления (датчик усилий на рычаге управления), связанный механически с рычагом управления, выход которого подключен к первому входу вычислителя управляющего сигнала, к второму входу которого через блок триммирования подключена кнопка триммирования, к третьему выход блока электрических датчиков параметров движения летательного аппарата, а выход вычислителя связан с входом электрогидравлического сервопривода, связанного через пружинную тягу с золотником рулевого привода, отличающаяся тем, что, с целью повышения безопасности управления, в нее введен датчик рассогласования штоков гидравлического и электрогидравлических сервоприводов, механически связанный с предварительной сжатой пружиной тягой, через которую гидравлический сервопривод подключен к золотнику рулевого привода параллельно с электрогидравлическими сервоприводами электродистанционной системы управления, причем выход датчика рассогласования штоков гидравлического и электрогидравлических сервоприводов через размыкающие контакты выключателя, установленного на рычаге управления, подключен к второму входу механизма триммирования, который через второй вход первого дифференциального механизма подключен последовательно к проводке управления гидравлическим командным устройством.
| Бородин В.Г., рыльский Г.И | |||
| Пилотажные комплексы и системы управления самолетов и вертолетов | |||
| М.: Машиностроение, 1978, с.33-34. |
