Предлагаемое устройство относится к области машиностроения, роботостроения и может использоваться для коррекции положения преимущественно плоских изделий при их захвате из стандартной тары вакуумными захватами.
Известны вакуумные захватные модули (см. а.с. №1013266, МПК B25J 15/00, а.с. №1063589, МПК B25J 15/00), которые корректируют положение изделия, расположенного на рабочей поверхности, а затем захватывают его и поднимают.
Недостатком данных устройств является ограниченная область применения, так как требуемому смещению положения изделия может помешать наличие неровностей рабочей поверхности.
Известны вакуумные захватные модули, содержащие корпус, в котором размещен захват с приводом его вертикального перемещения. Причем на корпусе установлены направляющие с заходной частью под захватываемое изделие (Сысоев С.Н., Черкасов Ю.В. Агрегатно-модульное захватное устройство робота // Механизация и автоматизация производства. - 1987. - №1. - С.3, патент РФ 2256549, МПК B25J 15/06 Сысоев С.Н., Жиров М.Ю.).
Данные устройства корректируют положение изделия силовым взаимодействием на нее заходной частью направляющих. Однако возможна коррекция только по координатам и величина ее незначительна.
Известны вакуумные захватные модули, содержащие корпус, в котором размещен привод вертикального перемещения с шарнирно закрепленным на выходном звене вакуумным захватом. На корпусе закреплены направляющие с установленными на концах поворотными элементами (а.с. 1018221, МПК B25J 15/06, Сысоев С.Н., Черкасов Ю.В.).
Данное устройство выполняет коррекцию положения изделия по координатам и углу, но величина ее также незначительна.
Наиболее близким по технической сущности из известных устройств является вакуумный захватный модуль (см. Сысоев С.Н. Принципы и методы нахождения технических решений. Метод исследования функционально-физических связей: моногр. / С.Н.Сысоев; Владим. гос. ун-т. - Владимир: Изд-во Владим. гос. ун-та, 2007. - 214 с., с.144-147. ISBN 5-89368-775-2).
Устройство содержит корпус, в котором размещен привод вертикального перемещения с шарнирно установленным на выходном звене вакуумным захватом с уплотнительным элементом. На корпусе закреплены направляющие под захватываемое изделие. Устройство конструктивно выполнено так, что усилие подъема изделия больше усилия его удержания вакуумным захватом. За счет этого устройство реализует способ (см. пат. SU №1551546, МПК 25J 15/06 «Способ коррекции положения детали в схвате промышленного робота», опубл. 23.03.90 г., бюл. №11, С.Н.Сысоев, Ю.В.Черкасов) многократной коррекции положения детали.
В данном устройстве величины давлений разрежения воздуха в приводе перемещения захвата и присоске взаимосвязаны и зависят друг от друга, что затрудняет организацию их требуемого соотношения в процессе корректирующих операций. Особенно при использовании безнасосных вакуумных захватов данные устройства обладают низкой надежностью работы.
Техническим эффектом предлагаемого изобретения является повышение надежности удержания и коррекции изделия в захватном модуле.
Технический эффект достигается тем, что в вакуумном захватном модуле, содержащем корпус с направляющими элементами под захватываемое изделие и привод перемещения присоски, выполненной с уплотнительным элементом, шарнирно закрепленной на подвижном органе с возможностью перекоса и подпружинено относительно среднего положения, по периметру присоски жестко закреплены рычаги, корпус снабжен ограничителями хода рычагов, дающими возможность отведения уплотнительного элемента от поверхности изделия при перекосах присоски.
Пример реализации показан на чертеже. Устройство состоит из корпуса 1, на котором закреплен пневмопривод, выполненный в виде сильфона 2, подпружиненного пружиной 3, рабочая полость которого выполнена с возможностью соединения через распределитель 4 с линией питания давления разрежения воздуха. На корпусе жестко установлены направляющие 5 с ограничителями 6. Рычаги 7, подпружиненные к корпусу присоски 9, закреплены на ее уплотнительном элементе 10 с возможностью силового взаимодействия с изделием 11. Полость присоски соединена с рабочей полостью сильфона через клапан 12.
Устройство работает следующим образом. В исходном положении (поз. а) клапан 12 закрыт и рабочая полость сильфона 2 не соединена с полостью присоски 9. Рабочая полость сильфона соединена через распределитель 4 с пневмолинией давления разрежения воздуха. Так как рабочая полость сильфона герметична и из нее постоянно откачивается воздух, то под действием усилия от давления разрежения воздуха присоска 9 занимает крайнее верхнее положение. При этом вследствие отсутствия перекоса присоски рычаг 7 не взаимодействует с ограничителем 6.
По команде «взять изделие», которое смещено от требуемого положения на величину А, включают клапан 12 (поз. б), соединяя рабочую полость сильфона с полостью присоски. Происходит разгерметизация рабочей полости сильфона, уменьшается величина давления разрежения воздуха в этой полости и присоска под действием пружины опускается на поверхность изделия 11. Полость присоски герметизируется уплотнительным элементом присоски и изделием. Так как из полости присоски откачивается воздух, то в ней создается давление разрежения, что соответствует операции захвата изделия. Одновременно с повышением величины давления разрежения воздуха в камере присоски повышается величина давления разрежения воздуха в рабочей полости сильфона. Начинается процесс поднятия изделия (поз. в). Перемещение изделия ограничивается направляющей, расположенной со стороны смещения изделия. При дальнейшем поднятии изделие, перекашиваясь, корректирует свое положение, смещаясь на шаг в требуемую сторону. В дальнейшем рычаг 7, упираясь в ограничитель 6 и поворачиваясь по часовой стрелке, отводит уплотнительный элемент 10 присоски от поверхности изделия, разгерметизируя полость присоски. Изделие начинает совершать свободное падение. Так как полость присоски соединена с рабочей полостью сильфона, то в последней уменьшается величина давления разрежения, то есть уменьшается усилие подъема сильфона и присоска под действием пружины 3 начинает опускаться, одновременно поворачиваясь и занимая свое среднее положение (поз. г). Далее повторяются операции захвата, подъема с коррекцией положения изделия до тех пор, пока изделие не займет свое положение в направляющих (поз. д).
Данное устройство снимает ограничения, связанные с параметрами присоски, и позволяет повысить надежность захвата, удержания изделия и в целом работу устройства по взятию изделия с коррекцией его положения.
В лаборатории автоматизации производственных процессов Владимирского государственного университета проводились макетирование и натурные испытания предлагаемого устройства.
Испытания показали повышение надежности удержания и коррекции изделия в захватном модуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| Вакуумный захватный агрегатный модуль | 2018 |
|
RU2691155C1 |
| Захватный корректирующий модуль | 2017 |
|
RU2657672C1 |
| Захватный корректирующий модуль | 2017 |
|
RU2668241C1 |
| Захватный корректирующий модуль | 2016 |
|
RU2622071C1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Вакуумный захватный агрегатный модуль | 2019 |
|
RU2703771C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2304505C2 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2006 |
|
RU2312762C1 |
Предлагаемое устройство относится к области машиностроения, роботостроения и может использоваться для коррекции положения преимущественно плоских изделий при их захвате из стандартной тары вакуумными захватами. Вакуумный захватный корректирующий модуль содержит корпус с направляющими элементами под захватываемое изделие, присоску и привод ее перемещения. Причем присоска выполнена с уплотнительным элементом, закреплена с возможностью перекоса и подпружинена относительно среднего положения. Корпус снабжен ограничителями хода рычагов, закрепленных по периметру на уплотнительном элементе с возможностью отведения его от поверхности изделия при перекосах присоски. Изобретение снимает ограничения, связанные с параметрами присоски, и позволяет повысить надежность захвата, удержания изделия и в целом работы устройства по взятию изделия с коррекцией его положения. 1 ил.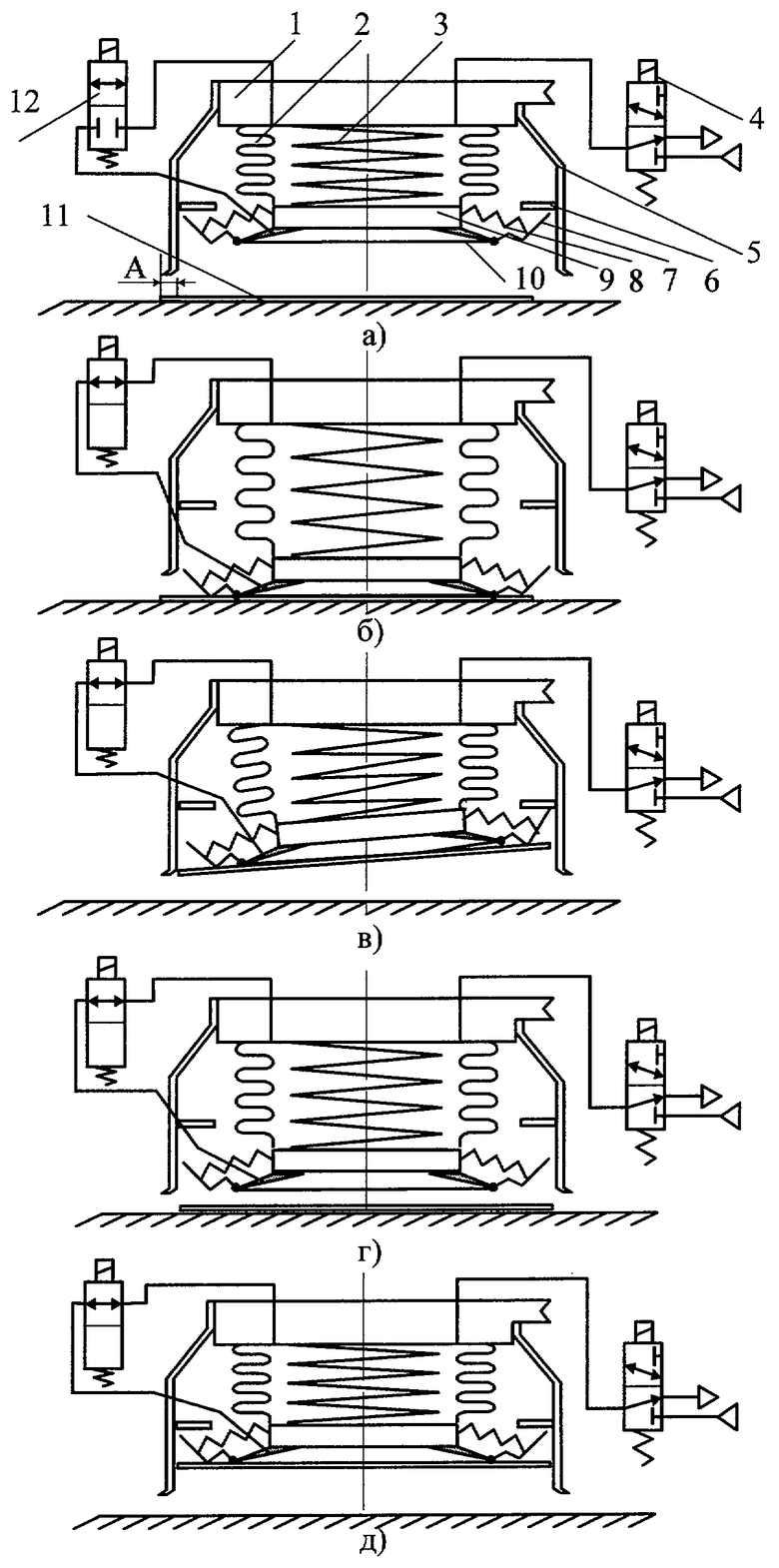
Вакуумный захватный корректирующий модуль, содержащий корпус с направляющими элементами под захватываемое изделие и привод перемещения присоски, выполненной с уплотнительным элементом, закрепленной с возможностью перекоса и подпружиненной относительно среднего положения, отличающийся тем, что корпус снабжен ограничителями хода рычагов, закрепленных по периметру на уплотнительном элементе с возможностью отведения его от поверхности изделия при перекосах присоски.
| SU 1551546 A1, 23.03.1990 | |||
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2008 |
|
RU2370359C1 |
| WO 9630169 A1, 03.10.1996 | |||
| US 2007187965 A1, 16.08.2007. | |||

