Изобретение относится к машиностроению, а именно к конструкциям самоходных погрузо-разгрузочных средств общего назначения, например подъемных кранов на автомобильном ходу.
Известны конструкции автомобилей, на специальных платформах которых смонтированы подъемные краны. Рама подъемного крана имеет, как правило, четыре независимые установочные откидные опоры винтового типа.
В рабочем положении винтовые опоры обеспечивают жесткую горизонтальную установку крана независимо от упругой подвески автомобильного шасси.
Недостатком аналога является затрудненность приведения опор в рабочее положение, так как управление винтом производится вручную. Ручное управление также затрудняет дозировку предварительного усилия, необходимого для уплотнения грунта под опорами. Особенности конструкции винтовых опор делают нерациональной механизацию управления движением винта. Процесс установки опор достаточно длителен, что снижает общую производительность устройства.
Известны конструкции специализированных автомобилей-кранов общего назначения, на раме которых смонтирована дополнительная рама поворотного крана, имеющая, например, четыре гидравлические опоры в виде гидравлического цилиндра с поршнями, включенный в управляющую гидросистему, и имеющие гидравлические замки, обеспечивающие жесткость опор рамы, установленной горизонтально.
В такой конструкции дополнительная рама крана имеет легко управляемые опоры, независимые от упругих элементов подвески рамы автомобиля. Грузоподъемность самоходного крана ограничена только тяжестью самого грузоподъемного устройства, перевозимого автомобилем, а дополнительные нагрузки от груза, поднимаемого краном, воспринимаются опорами дополнительной рамы, на которой установлен кран.
Недостатком конструкции является невозможность обеспечения требуемых усилий во всех четырех опорах рамы крана из-за известной статической неопределимости любой жесткой системы, имеющей число опор более трех. В результате при осуществлении погрузо-разгрузочного цикла работ возникает покачивание рамы крана в сторону мало нагруженной опоры (эффект качающейся табуретки с четырьмя ножками, в то время как табуретка с тремя ножками всегда устойчива). Например, при установке опор крана их с помощью гидравлики досылают до соприкосновения опорных поверхностей с почвой, затем, увеличивая подачу гидроносителя (жидкости) в цилиндры определенных опор визуально (или по инструменту-уровню), устанавливают горизонтальность рамы крана. При этом вероятна ситуация, когда под действием веса крана горизонтальная его рама устанавливается устойчиво (статическая определимость) только на трех опорах, тогда как четвертая опора может при этом едва касаться почвы без передачи усилия. Если к тому же под четвертой опорой грунт сравнительно рыхлый, то при работе крана смещение общего центра тяжести в сторону четвертой опоры (опора жесткая, на гидравлическом замке) приведет к наклону всей рамы в сторону четвертой опоры за счет уплотнения под ней грунта. В целом кран частично теряет устойчивость. Покачивание рамы крана во время работы может оказаться причиной нарушения рабочего цикла и ведет к повышению утомляемости оператора. Этот недостаток особенно проявляется при работе в полевых условиях, когда плотность грунта под каждой из опор рамы крана может оказаться различной.
Задачей изобретения является создание конструкции самоходного погрузо-разгрузочного устройства, например крана общего назначения с индивидуальными гидравлическими опорами, позволяющей при установке в рабочее положение равномерно распределить усилия между всеми, например, четырьмя опорами, независимо от профиля плотности грунта под каждой из опор рамы крана.
В изобретении поставленная задача решена с помощью следующей конструкции: в самоходном погрузо-разгрузочном кране общего назначения, состоящего из транспортного средства автомобильного типа, на раме которого установлена горизонтально рама крана с четырьмя независимыми опорами, каждая из которых выполнена в виде гидроцилиндра с поршнем и включена в управляющую гидросистему через индивидуальный гидравлический замок. В гидросистему введено дополнительное золотниковое устройство в виде корпуса с четырьмя одинаковыми отверстиями, размещенными по корпусу с равным шагом друг от друга, большим размера отверстия, каждое из которых сообщено с рабочей полостью гидроцилиндра соответствующей ему опоры, и золотника, установленного в корпусе золотникового устройства и выполнено со щелью для приема гидроносителя из отверстий корпуса с возможностью разделения посредством нее гидроцилиндров опор на три гидравлически управляемые независимо друг от друга группы.
При этом золотник имеет возможность перемещаться относительно корпуса как вдоль, так и поперек их расположения.
В результате предлагаемая конструкция позволяет объединить гидравлически две из опор в их последовательной очередности и образовать для крана три независимых опоры, обеспечивая для рамы крана устойчивость в силу статической определимости трехопорной системы. Нагрузка при этом на все опоры распределяется равномерно с равномерным под ними уплотнением грунта. После достижения платформой крана горизонтального положения золотниковое устройство отключают, перемещая золотник поперек расположения отверстий в корпусе, обеспечивая тем самым включение индивидуальных гидрозамков каждой нагруженной опоры. В случае работы на грунте с большой неравномерностью его плотности золотник перемещают вдоль отверстий в корпусе, последовательно меняя опору, включающую сразу два гидроцилиндра, добиваться еще более равномерного распределения усилий от грунта на все четыре опоры, прежде чем установить их на индивидуальные гидрозамки при горизонтальном расположении рамы крана.
Предлагаемая конструкция еще и несколько сокращает время горизонтальной установки рамы крана, так как заполнение гидроносителем производится последовательно в трех (а не четырех) опорах, из которых в одной объединены две опоры крана через гидроцилиндры и щель дополнительного золотникового устройства.
Предлагаемую конструкцию целесообразно использовать также для многоопорных рам, когда число опор с индивидуальными гидроцилиндрами более четырех. В этом случае в золотнике устраивают две дополнительные щели, причем каждая из щелей выполнена с длиной, необходимой для объединения смежных отверстий корпуса золотника, в количестве наименее отличающемся от трети общего числа всех опор, в независимо управляемую гидравлическую группу. Например, если индивидуальных гидравлических опор рамы десять, то щели золотника объединяют три группы опор по три, три и четыре гидроцилиндра. Выставка горизонтального положения рамы производится подачей жидкости с помощью дополнительного золотникового устройства последовательной подачей гидроносителя в каждую из трех групп опор. После достижения рамой горизонтального положения в условиях статически определимой трехопорной системы с равномерным распределением нагрузок на индивидуальные десять гидроопор, каждую из десяти индивидуальных опор ставят на свой гидрозамок смещением золотника дополнительного золотникового устройства поперек относительного расположений отверстий в корпусе.
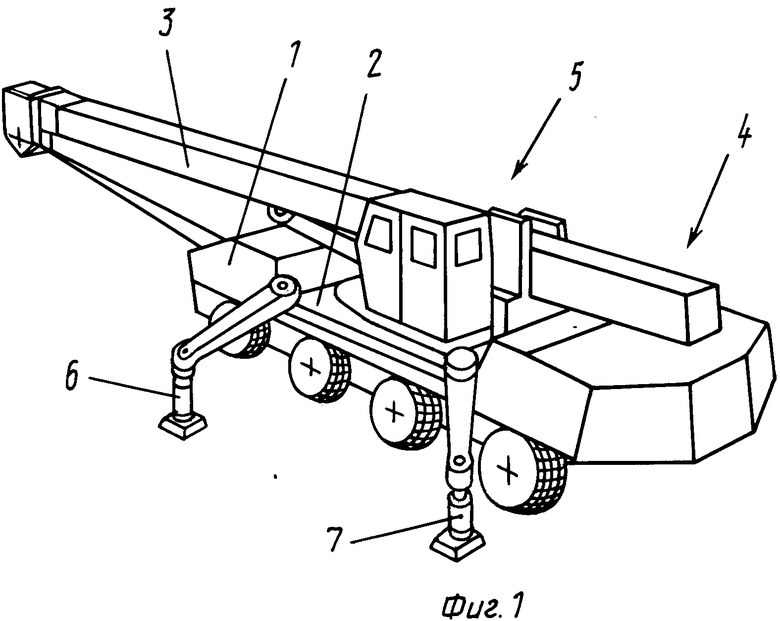
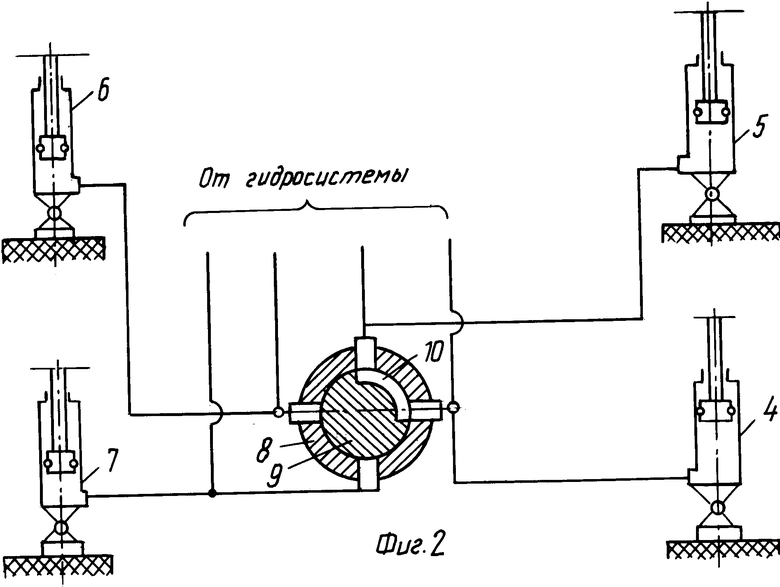
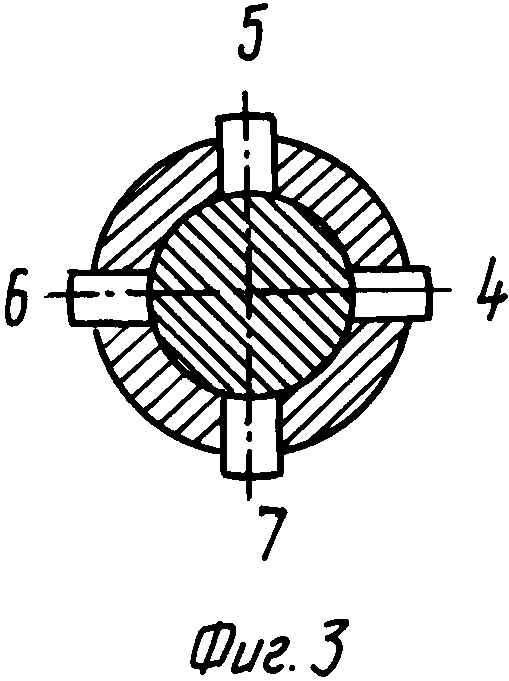
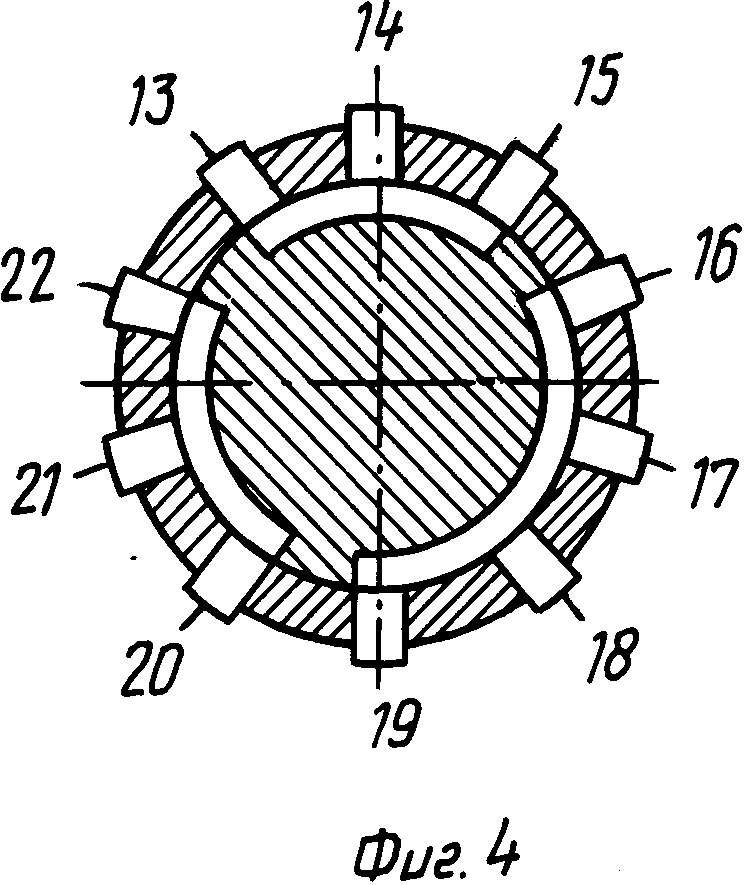
На фиг. 1 показан общий вид самоходного погрузо-разгрузочного крана общего назначения с четырьмя гидравлическими опорами рамы крана (транспортная часть крана представляет собой видоизмененную конструкцию бронетранспортера (БТР) военного назначения, предназначенного в рамках программы конверсии для использования в сфере гражданского производства); на фиг. 2 дополнительное золотниковое устройство с гидролиниями подсоединения его к индивидуальным гидравлическим опорам рамы крана; на фиг. 3 дополнительное золотниковое устройство при положении золотника, обеспечивающим его отсоединение от гидросистемы индивидуальных опор и установке последних на гидравлический замок; на фиг. 4 дополнительное золотниковое устройство для рамы тяжелого крана с десятью индивидуальными гидравлическими опорами.
Самоходный кран состоит из самоходного устройства 1, приспособленного для крана из колесного бронетранспортера. На корпусе БТР жестко закреплена рама 2 поворотного крана 3, имеющая четыре индивидуальные установочные откидные опоры 3-7, управляемые по длине гидравлически и содержащие гидроцилиндр, шток и поршень. В положении конструкции перед началом работ рама 2 установлена горизонтально на трех опорах, из которых одна представляет собой гидравлически связанную группу индивидуальных опор 4 и 5, а две другие являются собственно индивидуальными опорами 6 и 7. Цилиндры гидравлических опор группы 4 и 5 и опор 6 и 7 заперты гидравлическими замками. При работе крана все четыре опоры 4-7 являются разобщенными (индивидуальными) и установлены на гидравлические замки каждая.
Рабочие полости цилиндров опор 4-7 связаны гидравлически (см. фиг. 2) с корпусом 8 дополнительного золотникового устройства с поворотным золотником 9. Положение золотника 9 на фиг. 2 относительно корпуса 8 показано для периода установки рамы 2 в горизонтальное положение. Щель 10 золотника объединяет гидравлически опоры 4 и 5 в одну групповую опору, воспринимающую дискретно-гибко приходящийся на нее вес крана. Нежелательное перемещение поршней в цилиндрах опор 4 и 5 при этом исключено реакциями индивидуальных опор 6 и 7, жидкость в цилиндрах которых заперта гидравлическими замками и не может переходить через дополнительное золотниковое устройство, как это видно на фиг. 2. Золотник 9 при повороте относительно корпуса 8 может занимать различные положения, отличающиеся друг от друга смещенностью на угловой шаг и расположения отверстий в корпусе. Таким образом, могут иметь место другие комбинации трехопорной системы: группа 5, 6 и опоры 4 и 7; группа 6, 7 и опоры 5 и 4; группа 7, 4 и опоры 5 и 6. (Последовательная смена состава групп одной групповой опоры рекомендуется только на рыхлых грунтах с неравномерной плотностью). Золотник 9 может занимать положение, смещенное вдоль его оси. При этом, как показано на фиг. 3, все индивидуальные опоры 4-7 разобщены гидравлически. Такое положение дополнительного золотникового устройства, когда опоры 5, 4, 6 и 7 на гидравлических замках, должно быть при работе крана на погрузо-разгрузочных операциях: все опоры жесткие и равномерно нагружены реакциями от уплотненного под ними грунта.
На фиг. 4 показан схематический чертеж дополнительного золотникового устройства для рамы, например, с десятью индивидуальными опорами. Отверстия 13-22 в корпусе золотника 8 гидравлически связаны с рабочими полостями цилиндров десяти гидравлических опор рамы и расположены равномерно в последовательной очередности. Золотник 9 имеет две дополнительные щели 11 и 12 и обеспечивает прием гидроносителя из трех групп отверстий соответственно: первая группа 13-15; вторая группа 16-19; третья группа 20-22, Каждая группа с помощью щелей в золотнике гидравлически объединена в одну дискретно гибкую опору, состоящую из группы соответствующих индивидуальных опор. Поворотное смещение золотника 9 относительно корпуса 8 на один угловой шаг расположения отверстий в корпусе 8 дает новое расположение опор в каждой из трех групп. Так, если на фиг. 4 повернуть золотник 9 относительно корпуса 8 на один угловой шаг расположения отверстий в корпусе, например по часовой стрелке, то будут образованы три дискретно-гибкие группы опор: первая 14-16; вторая 17-20; третья 21-13. Так можно получить различные комбинации содержания опор с их последовательной очередности. Осевое смещение золотника приводит к перекрытию всех отверстий в корпусе 8 (аналогично, как показано на фиг. 3) и гидравлическому отсоединению дополнительного золотникового устройства от индивидуальных гидравлических опор рамы.
Предлагаемый самоходный погрузо-разгрузочный кран работает следующим образом.
Самоходный погрузо-разгрузочный кран, транспортное сpедство которого представляет собой реконструированный колесный бронетранспортер, обладает свойствами вездеходности и предназначен для плановых и срочных обслуживаний объектов в полевых условиях, например, для обслуживания нефтепроводов и газопроводов. Работа таких кранов осуществляется большей частью на неровном грунте с неодинаковым распределением по поверхности плотности грунта. Поэтому большое значение имеет правильная и надежная установка горизонтальности платформы крана. Последовательность необходимых работ включает доставку крана на объект, установку его на наиболее удобном для рабочего цикла месте. После чего все опоры крана, фиг. 1 и 2, последовательно опускают с помощью гидравлики до соприкосновения с грунтом и ставят опоры на гидрозамки. Дополнительное золотниковое устройство установлено в положении золотника 9, показанном на фиг. 2. После этого начинают установку горизонтальности рамы крана визуально или по уровню с помощью поочередной подачи гидроносителя в две опоры, расположенных наиболее низко от желаемой горизонтальной поверхности рамы. Щель 10 золотника 9 обеспечивает трехопорность рамы 2, так как опоры 4 и 5 гидравлически объединены. Поэтому воздействие на любые две опоры при жесткой третьей приводит к достижению горизонтальности рамы 2 с равномерно необходимым распределением нагрузок на все четыре опоры 4-7. Очевидно, что при этом достаточно подавать гидроноситель в любые две опоры, занимающие наиболее низкое положение опорных поверхностей. По достижении рамой 2 горизонтального положения золотник 9 смещают в осевом направлении, запирая отверстия в корпусе 8, как это показано на фиг. 3. Кран готов к работе: рама 2 горизонтальна, все четыре опоры необходимо напряжены с соответствующим уплотнением грунта под ними.
В случае особо неравномерной плотности грунта после установки горизонтальности для рамы 2 следует повернуть золотник 9 в корпусе 8 на один-два оборота, последовательно меняя состав гидравлически объединенных в группу опор. После чего отсоединить золотниковое устройство (фиг. 3). Такой прием позволяет более равномерно уплотнить грунт под опорами рамы 2.
В случае многоопорной рамы (фиг. 4) досылают до грунта последовательно группы опор (13-15), (16-19) и (20-22), после чего достигают горизонтальности рамы крана, подавая гидроноситель поочередно в две группы с наиболее низким расположением от горизонтали. Несмотря на десять опор система статически определена, являясь трехопорной, каждая группа является одной дискретно гибкой опорой с необходимым распределением нагрузок под каждой индивидуальной опорой в группе. Для более равномерного распределения нагрузок поворачивают золотник 9 относительно корпуса 8 на один-два оборота, корректируют, если требуется, горизонтальность рамы и отключают золотниковое устройство аналогично тому, как это показано на фиг. 3. В случае длительного использования рамы указанные действия можно проводить периодически для компенсации релаксационных свойств грунта и компенсации возможных утечек гидроносителя в гидравлической системе крана. Отметим, что надежная многоопорность конструкции рамы позволяет снижать жесткость, а следовательно, и вес рамы, на которых установлено оборудование, в частности кран.
Таким образом, предлагаемая конструкция самоходного погрузо-разгрузочного крана в отличие от прототипа позволяет получить надежное устойчивое закрепление рабочей платформы крана независимо от неровностей и плотности грунта под опорами многоопорной (более трех) системы. Кроме того, изобретение позволит снизить жесткость и, следовательно, вес рамы за счет увеличения числа индивидуальных опор, надежность опоры на грунт которых теперь не зависят от количества индивидуальных опор.
Изобретение может быть использовано для использования в различных самоходных устройствах, транспортирующих к месту производства работ рабочие платформы с индивидуальными опорами на грунт с неровностями и неоднородной плотности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| БУНКЕРОВОЗ | 2000 |
|
RU2172685C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОВОЙ УСТОЙЧИВОСТЬЮ МОБИЛЬНОГО ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349536C1 |
| Транспортное средство для проведения сейсмических исследований | 1980 |
|
SU900234A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2259280C1 |
| УСТРОЙСТВО БЛОКИРОВКИ ТЕЛЕСКОПИЧЕСКОЙ ОПОРЫ СТРОИТЕЛЬНОЙ МАШИНЫ И СПОСОБ ЗАЩИТЫ ОТ УГОНА СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2535355C1 |
| КОМПЛЕКС ДЛЯ БУРЕНИЯ СКВАЖИН В СКАЛЬНЫХ ПОРОДАХ | 2023 |
|
RU2819392C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
Использование: в машиностроении, а именно в конструкциях самоходных погрузо-разгрузочных устройствах общего назначения, например подъемных кранов на автомобильном ходу. Сущность изобретения: на корпусе самоходного крана закреплена горизонтальная рама поворотного крана с четырьмя независимыми опорами, каждая из которых содержит гидроцилиндр, шток и поршень. Перед началом работ рама установлена горизонтально на трех опорах, одна из которых представляет собой гидравлически связанную группу индивидуальных опор. Цилиндры гидравлических опор обеих групп заперты гидравлическими замками. При работе крана все опоры являются разобщенными и установлены на гидравлические замки каждая. Рабочие полости цилиндров связаны гидравлически с корпусом дополнительного золотникового устройства с поворотными золотником, который выполнен с щелью для возможности составления различных комбинаций трехпорной системы. 1 з.п. ф-лы, 4 ил.
| Зайцев Л | |||
| В | |||
| и Полостин М | |||
| Д | |||
| Автомобильные краны | |||
| М.: Высшая школа, 1987, с.151, рис | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
