Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано в самоходных транспортно-погрузочных средствах.
Известны шагающие опоры для транспортных средств повышенной проходимости, выполненные в виде несущего корпуса, на котором побортно установлены два передних и два задних шагающих движителя, выполненные в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости (Патент РФ N 2063354, М.кл. В 62 D 57/032, 1996 г.).
Недостатком данных опор является конструкция шагающих движителей, не обладающих достаточной устойчивостью к опрокидыванию в эксплутационных условиях.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры для многоопорных самоходных машин и для транспортных средств повышенной проходимости (Патент РФ N 2063353, М.кл. B 02 D 57/032, 1996 г.). Шагающая опора содержит несущий корпус, на котором побортно установлены два передних и два задних шагающих движителя, выполненных в виде шарнирных четырехзвенников лямбдаобразного типа, силовой привод и самоблокирующийся межосевой симметричный, дифференциал.
Недостатком указанной шагающей опоры является наличие шагающих движителей, установленных на несущем корпусе, не обеспеченным системой подрессоривания, а улучшенная адаптация шагающих движителей к грунту достигается за счет довольно сложной в конструктивном отношении межбортовой дифференциальной связи.
Данная шагающая опора имеет сравнительно невысокий технический уровень, что обусловлено расположением шагающих движителей и наличием сложной межбортовой дифференциальной связи шагающих движителей, не обеспеченных системой подрессоривания, что приводит к высоким динамическим нагрузкам на корпусе шагающей опоры при ее движении, вследствие вертикальных и продольных колебаний корпуса, вызванных самим принципом работы шагающего движителя лямбдаобразного типа, а также недостаточной устойчивостью к опрокидыванию из-за малого числа опорных точек, дифференциальной связи шагающего движителя и обратимостью перемещений шагающих движителей при неработающем силовом приводе.
В этой связи важнейшей задачей является создание новой системы взаимодействия шагающих движителей, попарно установленных на независимых шагающих опорах правого и левого борта на базе новой подвески с новой системой подрессоривания с независимыми шагающими движителями правого и левого борта с улучшенной адаптацией шагающей опоры к неровностям грунта и повышенной устойчивостью к опрокидыванию с возможностью установки на опоре крана-манипулятора, жестко установленного на грунте посредством как минимум четырех шагающих движителей, одновременно находящихся в стадии опоры на грунт с обязательным исключением обратимости перемещений шагающих движителей при неработающем силовом приводе.
Техническим результатом заявленной конструкции шагающей опоры является создание новой системы взаимодействия шагающих движителей, попарно установленных на независимых шагающих опорах правого и левого борта, за счет новой подвески, включающей основные элементы системы подрессоривания с амортизаторами, дополнительную шарнирную связь независимых шагающих опор правого и левого борта, что дает им возможность независимого углового перемещения по отношению к корпусу, и ограничители бокового увода, исключающие боковой увод передних шагающих движителей, а также новая кинематическая схема бортового силового привода, обеспечивающая: 1) жесткую кинематическую связь шагающих движителей одного борта при противофазном расположении кривошипов каждой пары шагающих движителей; 2) самоторможение шагающих движителей при неработающем силовом приводе, что позволяет исключить обратимость перемещений шагающих движителей при неработающем силовом приводе, чем достигается жесткая установка крана-манипулятора шагающей опоры на грунте посредством разнесенных в разные стороны по отношению к корпусу как минимум четырех шагающих движителей одновременно находящихся в стадии опоры на грунт, в результате чего значительно повышается устойчивость к опрокидыванию и обеспечивается возможность осуществления транспортно-погрузочных операций в условиях сложной местности без установки дополнительных опор на грунт и без блокировки системы подрессоривания, тем самым значительно расширяется область возможного использования заявленной шагающей опоры.
Указанный технический результат достигается тем, что шагающая опора для многоопорных самоходных машин транспортно-погрузочных средств повышенной проходимости, содержащая корпус транспортного средства с побортно установленными на нем четырьмя передними и четырьмя задними шагающими движителями, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости и снабженных башмаками, и силовой привод, содержит подрессоренную раму транспортного средства, которая установлена на шагающие опоры правого и левого борта, каждая шагающая опора содержит несущую балку, на концах которой попарно установлены пара передних и пара задних шагающих движителей, имеющих жесткую кинематическую связь, и бортовой силовой привод, снабженный самотормозящейся передачей для обеспечения необратимости перемещений шагающих движителей при неработающем силовом приводе, а подвеска транспортного средства содержит основные упругие элементы системы подрессоривания и амортизаторы, обеспечивающие упругодиссипативную связь подрессоренной рамы транспортного средства с шагающими опорами правого и левого бортов, и дополнительную ось, жестко связанную с подрессоренной рамой транспортного средства и шарнирно связанную с несущими балками шагающих опор правого и левого бортов, а также ограничители бортового увода шагающих опор правого и левого бортов, выполненных в виде упорных центров, жестко установленных на несущих балках и обеспечивающих возможность перемещения подрессоренной рамы транспортного средства только в вертикальном направлении, опору поворотной части крана-манипулятора, выполненную в виде плиты, снабженной проушинами, установленную на оси и закрепленную на несущей балке одной из шагающих опор.
Новая система взаимодействия шагающих движителей на базе новой подвески, включающей основные элементы системы подрессоривания с амортизаторами и дополнительную ось шарнирно связывающую несущие балки независимых шагающих опор правого и левого борта, дающая им возможность независимого углового перемещения по отношению к корпусу, а также ограничители бокового увода шагающих движителей, позволяет обеспечить эффективное подрессоривание транспортного средства на базе предлагаемой шагающей опоры и улучшить адаптацию к неровностям грунта.
Предлагаемая новая кинематическая схема бортового силового привода, включающего самотормозящуюся передачу и жесткую кинематическую связь шагающих движителей одного борта в совокупности с противофазным расположением кривошипов каждой пары шагающих движителей, позволяет исключить обратимость перемещений шагающих движителей при неработающем силовом приводе, чем достигается жесткая связь шагающих опор с грунтом при погрузочно-разгрузочных работах.
Новая конструкция подвески в совокупности с новой кинематической схемой бортового силового привода обеспечивает жесткую установку крана-манипулятора на грунте посредством как минимум четырех шагающих движителей, одновременно находящихся в стации опоры на грунт, позволяет осуществлять транспортировку грузов в условиях сложной местности и погрузочно-разгрузочные операции без установки дополнительных опор на грунт и без блокировки системы подрессоривания.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволил выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень".
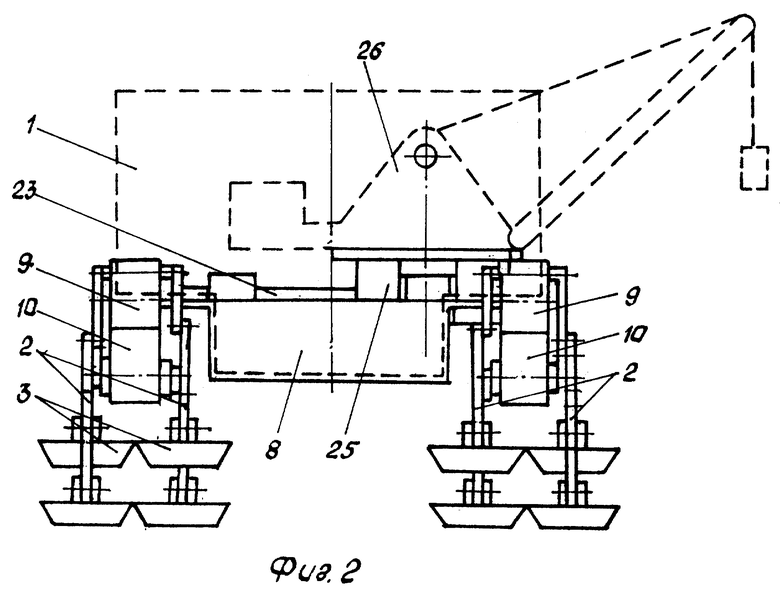
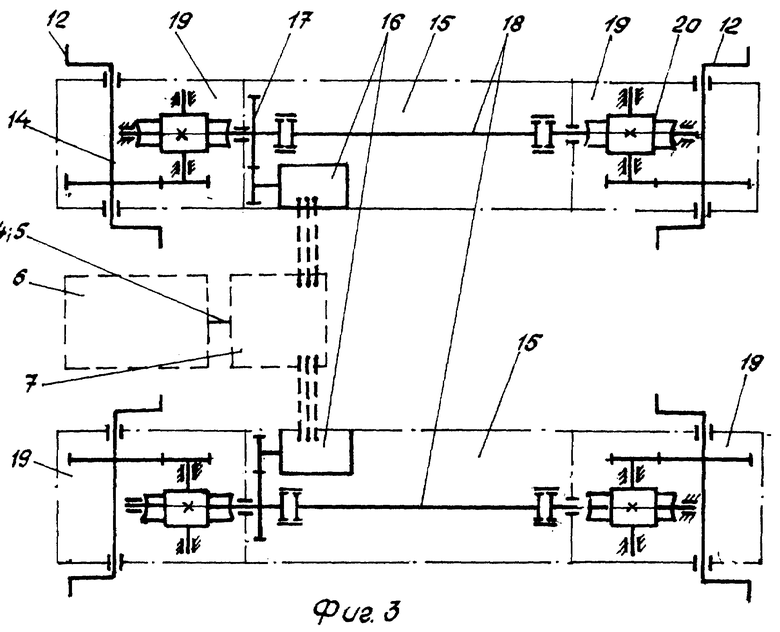
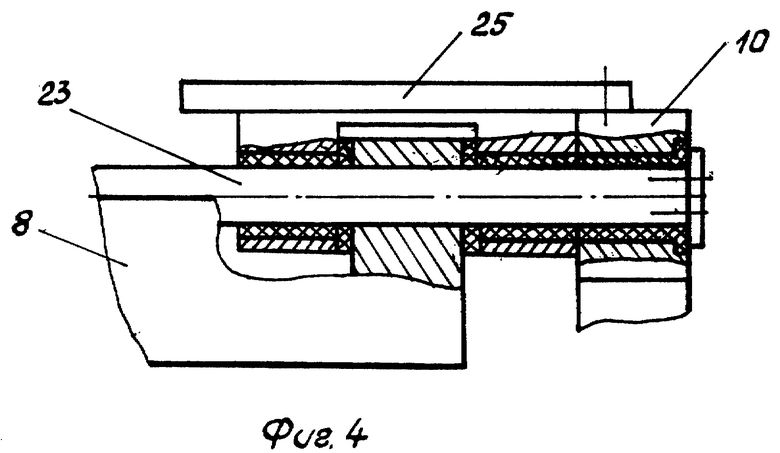
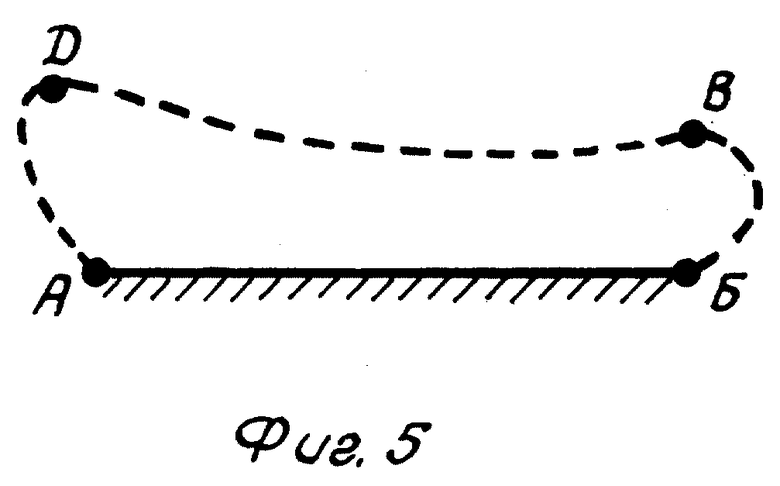
На фиг. 1 представлен общий вид шагающей опоры; на фиг. 2 - ее вид слева; на фиг. 3 - кинематическая схема силового привода; на фиг. 4 -увеличенный разрез А-А общего вида; на фиг. 5 - траектория опорных точек шагающих движителей.
Шагающая опора (фиг. 1, 2) содержит корпус транспортного средства 1 с побортно установленными на нем четырьмя передними и четырьмя задними шагающими движителями 2, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости и снабженных башмаками 3, и силовой привод 4 (фиг. 3), включающий в себя автономный источник электрического тока, например, дизель-генераторную установку 5, содержащую дизель 6 и генератор 7.
Корпус транспортного средства 1 (фиг. 1 - 3) установлен на подрессоренную раму транспортного средства 8 для улучшенной адаптации к неровностям грунта и обеспечения комфортабельности движения, которая, в свою очередь, установлена на шагающих опорах 9 правого и левого бортов.
Каждая шагающая опора 9 содержит несущую балку 10, на концах которой попарно установлены пара передних и пара задних шагающих движителей 2. Каждый из шагающих движителей 2 содержит криволинейную опору 11, снабженную башмаками 3 и шарнирно соединенную с кривошипом 12 и качающимся рычагом 13, второй конец которого шарнирно закреплен на несущей балке 10. Кривошипы каждой пары шагающих движителей 2 установлены в противофазе на общей ведущей оси 14 для обеспечения чередования опорной фазы и фазы переноса обоих шагающих движителей, причем ведущие оси 14 передних и задних шагающих движителей 2 имеют жесткую кинематическую связь между собой для обеспечения двух точек опоры на грунт и повышения устойчивости при движении опоры и при погрузочно-разгрузочных работах. На несущей балке 10 также установлен бортовой силовой привод 15, состоящий из тяговых электродвигателей 16, редуктора 17, вала 18 и двух бортовых редукторов 19, включающих в себя самотормозящуюся передачу 20, например червячную, для обеспечения необратимости перемещений шагающих движителей 2 при неработающем силовом приводе.
Подвеска транспортного средства содержит основные упругие элементы системы подрессоривания 21 и амортизаторы 22, обеспечивающие упругодиссипативную связь подрессоренной рамы транспортного средства 8 с шагающими опорами 9 правого и левого бортов и дополнительную ось 23 (фиг. 1, 4), жестко связанную с подрессоренной рамой транспортного средства 8 и шарнирно связанную с несущими балками 10 шагающих опор 9 правого и левого бортов для обеспечения как минимум четырех точек контакта между башмаками 3 шагающих движителей 2 и грунтом, а также ограничителями бокового увода 24 шагающих опор 9, выполненных в виде центров, жестко установленных на несущих балках 10 и проходящих внутри пазов, сделанных в подрессоренной раме транспортного средства 8 для обеспечения возможности ее перемещения только в вертикальном направлении.
Для обеспечения устойчивости и исключения опрокидывания при погрузочно-разгрузочных операциях шагающая опора снабжена неподрессоренной опорой 25 поворотной части крана-манипулятора 26, выполненной в виде плиты и снабженной проушинами. Опора 25 установлена на оси 23 и закреплена на несущей балке 10 одной из шагающих опор 9, например, левого борта, вследствие чего она всегда жестко установлена на грунте посредством как минимум четырех шагающих движителей, одновременно находящихся в стадии опоры на грунт.
Шагающая опора для многоопорных самоходных машин транспортно-погрузочных средств повышенной проходимости работает следующим образом. При установке шагающей опоры на грунт, вследствие шарнирной связи несущих балок 10 (фиг. 1 - 3) правого и левого бортов посредством оси 23, обеспечивающей их независимое угловое перемещение по отношению к корпусу транспортного средства 1, и из-за противофазного расположения кривошипов 12 на ведущих осях 14 каждой пары шагающих движителей 2, каждая из шагающих опор 9 будет опираться на грунт двумя башмаками 3, например, башмаками 3 переднего левого и заднего правого шагающих движителей 2 левой шагающей опоры 9 и башмаками 3 переднего правого и заднего левого шагающих движителей 2 правой шагающей опоры 10.
После запуска дизель-генераторной установки 5 крутящий момент тяговых электродвигателей 16 передается через редукторы 17 и валы 18 на бортовые редукторы 19 правой и левой шагающих опор 9, приводя в движение ведущие оси 14 и кривошипы 12 шагающих движителей 2. Кривошипы 12 начинают вращаться, приводят в движение шагающие движители 2, тем самым начинает осуществляться рабочий ход. Благодаря взаимодействию башмаков 3 шагающих движителей 2 с грунтом шагающая опора начинает движение.
Дальнейший цикл работы шагающей опор 9, поскольку шагающие движители правой и левой шагающей опор 9 работают одинаково, можно подразделить на следующие две основные стадии:
- передний левый и задний правый шагающие движители 2 находятся в фазе опоры на грунт, участок АБ траектории опорных точек шагающих движителей (фиг. 5) и осуществляют рабочий ход, а передний правый и задний левый шагающие движители 2 проходят фазу переноса БВДА, которая включает фазу подъема стопы БВ и фазу опускания стопы на грунт ДА;
- передний левый и задний правый шагающие движители 2 выходят из фазы опоры на грунт и переходят в фазу переноса БВДА, а передний правый и задний левый шагающие движители 2 переходят в фазу опоры на грунт АВ и осуществляют рабочий ход.
Рассмотрим цикл работы шагающих движителей 2 шагающей опоры 9 с момента, когда опорные точки переднего левого и заднего правого шагающих движителей 2 находятся в точке A траектории (фиг. 5), опираясь на грунт, а опорные точки переднего правого и заднего левого шагающих движителей 2 находятся в точке В траектории. В этом положении передний левый и задний правый шагающие движители 2 находятся в стадии опоры на грунт, а передний правый и задний левый шагающие движители 2 находятся в фазе переноса.
Крутящий момент передается от тяговых электродвигателей 16 через редукторы 17, валы 18 и бортовые редукторы 19 на кривошипы 12, обеспечивая их вращение с угловой скоростью рабочего хода. Кривошипы 12 поворачивают криволинейные опоры 11 и качающиеся рычаги 13 передних и задних шагающих движителей 2 правой и левой несущих балок 10. При этом опорные точки переднего левого и заднего правого шагающих движителей 2 левой несущей балки 10 движутся по траектории от точки A к точке Б, а опорные точки переднего правого и заднего левого шагающих движителей 2 левой несущей балки 10 перемещаются по траектории от точки В к точке Д. Так как опорные точки переднего левого и заднего правого шагающих движителей 2 левой несущей балки 10 находятся на грунте, то, оставаясь неподвижными относительно грунта, они способствуют перемещению шагающей опоры относительно грунта на длину рабочего хода АВ.
Когда опорные точки переднего левого и заднего правого шагающих движителей 2 окажутся в точке Б траектории, выйдут из зацепления с грунтом и перейдут в фазу подъема стопы БВ, опорные точки переднего правого и заднего левого шагающих движителей 2 окажутся в точке Д траектории и перейдут в фазу опускания стопы ДА, в конце которой войдут в контакт с грунтом.
Далее опорные точки переднего левого и заднего правого шагающих движителей 2, закончив фазу подъема стопы БВ, окажутся в точке B траектории и начнут перемещаться из точки B в точку Д, а опорные точки переднего правого и заднего левого шагающих движителей 2, войдя в контакт с грунтом, перейдут в опорную фазу АВ, перемещаясь из точки A в точку B траектории. В дальнейшем цикл работы повторяется.
В процессе каждого цикла работа шагающих движителей 2 сопровождается вертикальными перемещениями несущих балок 10, что обусловлено кинематикой шагающих движителей лямбдаобразного типа. При движении шагающей опоры в условиях сложной местности также имеют место вертикальные и угловые колебания несущих балок 10, обусловленных неровностями грунта. Угловые колебания несущей балки 10 не передаются на корпус транспортного средства 1 из-за шарнирной связи рамы транспортного средства 8 с несущими балками 10, осуществляемой посредством оси 23. Вертикальные колебания несущей балки 10, в отличие от угловых, передаются на корпус транспортного средства 1, но ввиду наличия подрессоренной рамы транспортного средства 8, связанной с шагающими опорами 9 посредством упругих элементов системы подрессоривания 21 и амортизаторов 22, обеспечивающих упругодиссипативную связь рамы транспортного средства 8 с несущими балками 10, вертикальные колебания корпуса транспортного средства 1 гасятся. При движении шагающей опоры, вследствие недостаточно жесткой связи правой и левой несущих балок 10 между собой в горизонтальной плоскости, возможен боковой увод шагающих движителей 2 относительно корпуса транспортного средства 1. Для ограничения бокового увода передних шагающих движителей 2 несущие балки 10 связаны с подрессоренной рамой транспортного средства 8 с помощью ограничителей бокового увода 24, выполненных в виде упорных центров, жестко установленных на несущих балках 10 и проходящих внутри пазов в раме транспортного средства 8, которые обеспечивают возможность ее перемещения только в вертикальном направлении.
При осуществлении погрузочно-разгрузочных работ шагающая опора всегда установлена на грунте посредством как минимум четырех шагающих движителей, одновременно находящихся в стадии опоры на грунт и разнесенных в разные стороны, что обусловлено шарнирной связью шагающей опоры 9 правого и левого борта посредством оси 23, противофазным расположением кривошипов 12 каждой пары шагающих движителей 2 и жесткой кинематической связью передних и задних шагающих движителей 2 каждой шагающей опоры 9. Самотормозящиеся передачи 20 исключают обратимость перемещений звеньев шагающих движителей 2 при неработающем силовом приводе при погрузочно-разгрузочных операциях, обеспечивая жесткую связь несущих балок 10 с грунтом. В свою очередь опора 25 поворотной части крана-манипулятора 26 (фиг. 1, 2, 4) установлена с помощью проушин на оси 23 к жестко связана, для исключения поворота опоры 25 вокруг оси 23, с одной из несущих балок 10, в результате чего кран-манипулятор 26 всегда жестко установлен на грунте посредством как минимум четырех точек опоры, что обеспечивает устойчивость и исключает опрокидывание шагающей опоры и дает возможность осуществлять погрузочно-разгрузочные работы установленному на шагающей опоре крану-манипулятору 26 без установки на грунт дополнительных опор.
Таким образом, вышеуказанные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
- шагающая опора для многоопорных самоходных машин и для транспортно-погрузочных средств повышенной проходимости для применения в многоопорных самоходных шагающих машинах, работающих в сложных условиях как транспортно-погрузочное средство с применением новой системы подрессоривания, обеспечивающей плавность хода и улучшенную адаптацию к неровностям грунта, и также в совокупности с новой кинематической схемой бортового силового привода обеспечивает повышенную устойчивость шагающей опоры к опрокидыванию при погрузочно-разгрузочных работах установленным на шагающей опоре краном-манипулятором, тем самым достигается качественно новый принцип работы и новые возможности шагающей машины на базе предложенной шагающей опоры;
- для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных конструктивных решений и способов применения;
- шагающая опора многоопорных самоходных машин транспортно-погрузочных средств повышенной проходимости, воплощенная в заявленном изобретении, при его осуществлении способна обеспечить достижение усматриваемого заявителем достигаемого технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано в самоходных транспортно-погрузочных средствах. Шагающая опора содержит корпус транспортного средства с побортно установленными на нем четырьмя передними и четырьмя задними шагающими движителями и силовой привод. Также она содержит подрессоренную раму транспортного средства, которая установлена на шагающие опоры правого и левого бортов. Каждая опора содержит несущую балку, на концах которой попарно установлены шагающие движители и бортовой силовой привод, снабженный самотормозящейся передачей для обеспечения необратимости перемещений шагающих движителей при неработающем силовом приводе. Подвеска транспортного средства содержит основные упругие элементы системы подрессоривания, амортизаторы и дополнительную ось, жестко связанную с подрессоренной рамой транспортного средства и шарнирно связанную с балками шагающих опор правого и левого бортов. В результате повышается устойчивость к опрокидыванию и обеспечивается возможность транспортно-разгрузочных операций в условиях сложной местности без установки дополнительных опор на грунт и без блокировки системы подрессоривания. 5 ил.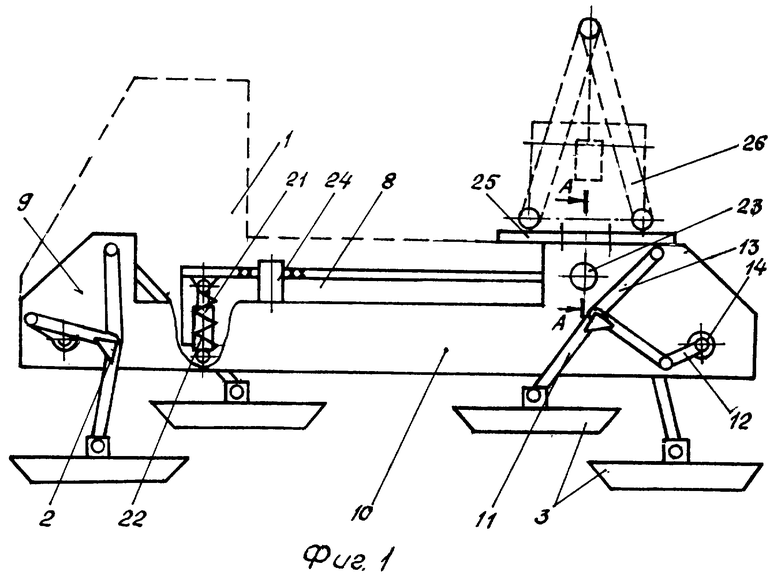
Шагающая опора для многоопорных самоходных машин транспортно-погрузочных средств повышенной проходимости, содержащая корпус транспортного средства с побортно установленными на нем четырьмя передними и четырьмя задними шагающими движителями, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости и снабженных башмаками, и силовой привод, отличающаяся тем, что содержит подрессоренную раму транспортного средства, которая установлена на шагающие опоры правого и левого борта, каждая шагающая опора содержит несущую балку, на концах которой попарно установлены пара передних и пара задних шагающих движителей имеющих жесткую кинематическую связь, и бортовой силовой привод, снабженный самотормозящейся передачей для обеспечения необратимости перемещений шагающих движителей при неработающем силовом приводе, а подвеска транспортного средства содержит основные упругие элементы системы подрессоривания и амортизаторы, обеспечивающие упругодиссипативную связь подрессоренной рамы транспортного средства с шагающими опорами правого и левого бортов, и дополнительную ось, жестко связанную с подрессоренной рамой транспортного средства и шарнирно связанную с несущими балками шагающих опор правого и левого бортов, а также ограничители бокового увода шагающих опор правого и левого бортов, выполненные в виде упорных центров, жестко установленных на несущих балках и обеспечивающих возможность перемещения подрессоренной рамы транспортного средства только в вертикальном направлении, опору поворотной части крана-манипулятора, выполненную в виде плиты снабженной проушинами, установленную на оси и закрепленную на несущей балке одной из шагающих опор.
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ЭНЕРГОПОГЛОЩАЮЩИЙ ЭЛЕМЕНТ ДЛЯ БАМПЕРА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2260523C1 |
| US 5551525 A, 03.09.96. | |||
