Изобретение относится к автоматизации контрольно-измерительных операций, а точнее к поверке стрелочных приборов.
Известно устройство, содержащее задатчик давления, схему управления операциями поверки, индикатор и установленный соосно со стрелкой поверяемого прибора диск со шкалой [1]
Указанное устройство не позволяет автоматизировать процесс поверки прибора, так как диск, дублирующий положение установившейся стрелки поверяемого прибора, устанавливается вручную.
Наиболее близким техническим решением к заявляемому устройству является устройство, содержащее блок задатчиков, первый выход которого соединен с поверяемым прибором, а второй выход с первым входом блока сравнения, выход которого соединен со входом блока индикации, а также механизм перемещения, соединенный с входами первого датчика положения стрелки и генератора калиброванной частоты, выход которого соединен с первым входом логической схемы И, выход которой соединен с первым входом блока памяти, второй вход которого соединен с выходом первого датчика положения стрелки, а третий вход с вторым входом логической схемы И и выходом первого триггера, первый вход которого соединен с выходом первого датчика положения стрелки, а второй вход с выходом включателя [2]
Недостатком указанного устройства является низкая точность считывания показания поверяемого прибора, обусловленная погрешностью, возникающей при несовпадении центра вращения датчика положения стрелки с центром вращения подвижной части поверяемого прибора.
Целью изобретения является повышение точности считывания показаний поверяемого прибора за счет исключения погрешности от несовпадения центра вращения датчика положения стрелки с центром вращения подвижной части поверяемого прибора.
Поставленная цель достигается тем, что в устройство, содержащее блок задатчиков, первый выход которого соединен с поверяемым прибором, а второй выход с первым входом блока сравнения, выход которого соединен с входом блока индикации, а также механизм перемещения, соединенный с входами первого датчика положения стрелки и генератора калиброванной частоты, выход которого соединен с первым входом логической схемы И, выход которой соединен с первым входом блока памяти, второй вход которого соединен с выходом первого датчика положения стрелки, а третий вход с вторым входом логической схемы И и выходом первого триггера, первый вход которого соединен с выходом первого датчика положения стрелки, а второй вход с выходом включателя, введены второй датчик положения стрелки, второй триггер, собирательная схема, блок функциональных преобразователей и вычислительный блок, причем первый вход собирательной схемы соединен с выходом включателя, второй вход с четвертым входом блока памяти и через второй датчик положения стрелки-с выходом механизма перемещения, а выход с первым входом второго триггера, второй вход которого соединен с выходом первого датчика положения стрелки, а выход с пятым входом блока памяти, выходы которого соединены с соответствующими входами блока функциональных преобразователей, выходы которого соединены с соответствующими первыми входами вычислительного блока, второй вход которого соединен с третьим выходом блока задатчиков, а выход с вторым входом блока сравнения.
Благодаря тому, что первый вход собирательной схемы соединен с выходом включателя, второй вход с четвертым входом блока памяти и через второй датчик положения стрелки -с выходом механизма перемещения, а выход с первым входом второго триггера, второй вход которого соединен с выходом первого датчика положения стрелки, а выход с пятым входом блока памяти, выходы которого соединены с соответствующими входами блока функциональных преобразователей, выходы которого соединены с соответствующими первыми входами вычислительного блока, второй вход которого соединен с третьим выходом блока задатчиков, а выход с вторым входом блока сравнения, исключается необходимость точного совмещения центра вращения датчика положения стрелки с центром вращения подвижной части поверяемого прибора, так как угол поворота стрелки поверяемого прибора от нулевого положения находится расчетным путем по двум координатам стрелки, находящейся в нулевом положении, и двум координатам текущего положения стрелки.
Известное устройство для поверки приборов требует точного совпадения центра вращения датчика положения стрелки с центром вращения подвижной части поверяемого прибора. В реальных условиях центр вращения подвижной части поверяемого прибора может быть определен только приближенно, поэтому неизбежны погрешности считывания поверяемого прибора, вызванные несовпадением центра вращения датчика положения стрелки с центром вращения подвижной части поверяемого прибора.
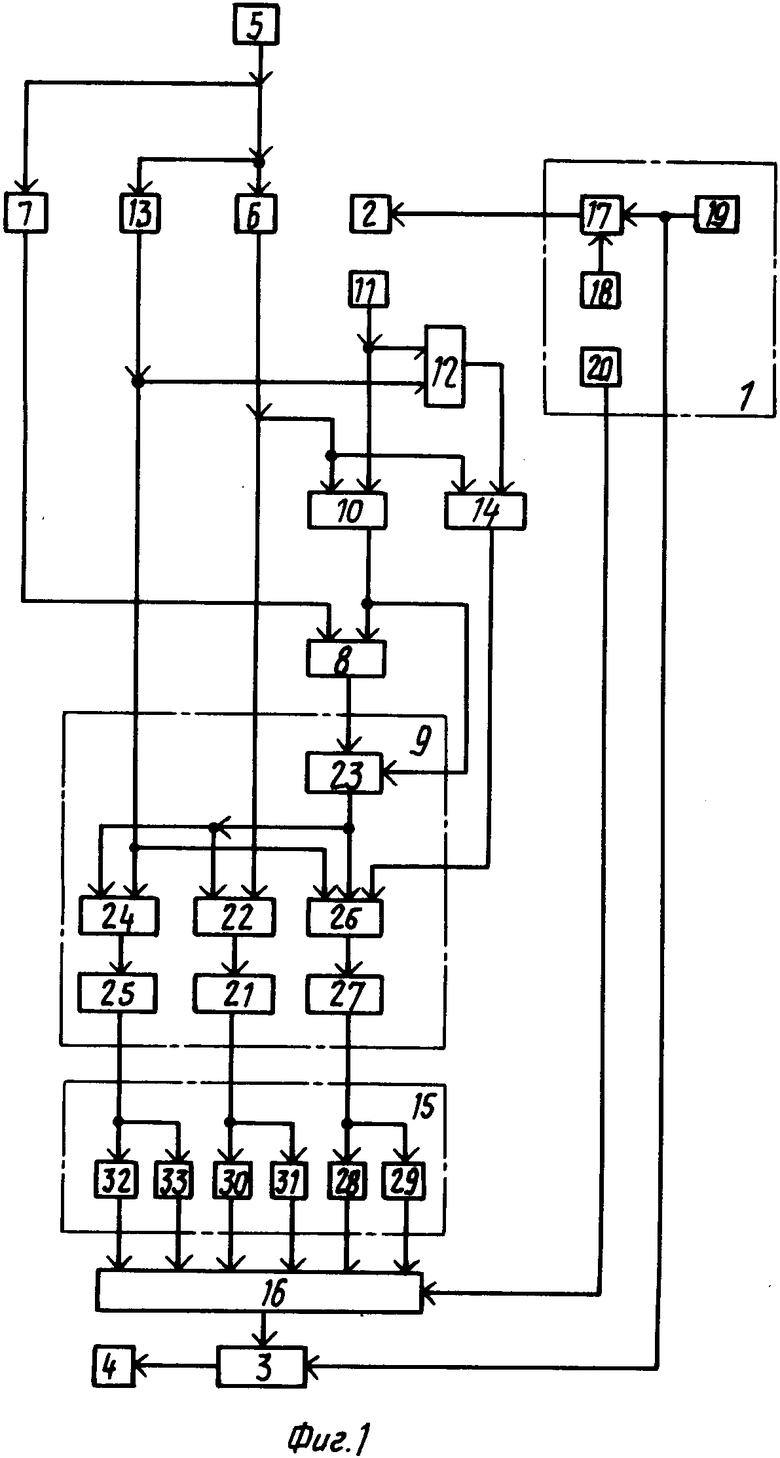
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 общий случай расположения датчиков положения стрелки относительно шкалы поверяемого прибора; на фиг.3 структурная схема вычислительного блока.
Устройство содержит блок 1 задатчиков, первый выход которого соединен с поверяемым прибором 2, а второй выход с первым входом блока 3 сравнения, выход которого соединен со входом блока 4 индикации, а также механизм 5 перемещения датчиков, соединенный с входами первого датчика 6 положения стрелки и генератора 7 калиброванной частоты, выход которого соединен с первым входом логической схемы И 8, выход которой соединен с первым входом блока 9 памяти, второй вход которого соединен с выходом первого датчика 6 положения стрелки, а третий вход с вторым входом логической схемы И 8 и выходом первого триггера 10, первый вход которого соединен с выходом первого датчика 6 положения стрелки, а второй вход с выходом включателя 11. Первый вход собирательной схемы 12 соединен с выходом включателя 11, второй вход с четвертым входом блока 9 памяти и через второй датчик 13 положения стрелки- с выходом механизма 5 перемещения, а выход с первым входом второго триггера 14, второй вход которого соединен с выходом первого датчика 6 положения стрелки, а выход с пятым входом блока 9 памяти, выходы которого соединены с соответствующими входами блока 15 функциональных преобразователей, выходы которого соединены с соответствующими первыми входами вычислительного блока 16, второй вход которого соединен с третьим выходом блока 1 задатчиков, а выход с вторым входом блока 3 сравнения.
На фиг.2 приняты следующие обозначения:
Ш шкала поверяемого прибора;
I исходное (нулевое) положение стрелки поверяемого прибора при нулевом значении контролируемого параметра;
II текущее положение стрелки поверяемого прибора при заданном значении контролируемого параметра;
О центра вращения датчиков положения стрелки;
О' центр вращения подвижной части поверяемого прибора;
Ох луч полярной системы координат;
Ао точка пересечения стрелки поверяемого прибора первым датчиком 6 положения стрелки при исходном (нулевом) положении стрелки поверяемого прибора;
А точка пересечения стрелки поверяемого прибора первым датчиком 6 положения стрелки при текущем положении стрелки поверяемого прибора;
Во точка пересечения стрелки поверяемого прибора вторым датчиком 13 положения стрелки при исходном (нулевом) положении стрелки поверяемого прибора;
В точка пересечения стрелки поверяемого прибора вторым датчиком 13 положения стрелки при текущем положении стрелки поверяемого прибора;
αbо угол между лучом (-Ох) и радиусом ОВо;
αa угол между лучом (-Ох) и радиусом ОА;
αb угол между лучом (-Ох) и радиусом ОВ;
β угол между исходным (нулевым) и текущим положением стрелки поверяемого прибора.
Из построения следует, что
ОАо=ОА=R (1)
OBо=OB=r, (2) где R и r радиусы вращения датчиков 6 и 13 положения стрелки соответственно;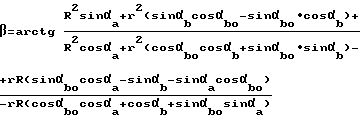
(3)
Блок 1 задатчиков предназначен для передачи в соответствии с типом поверяемого прибора по третьему выходу на второй вход вычислительного блока 16 установленных значений радиусов вращения датчиков 6 и 13 положения стрелки и для подачи в соответствии с программой поверки по первому выходу в поверяемый прибор 2 и второму выходу на первый вход блока 3 сравнения заданной величины поверяемого параметра (см. фиг.1).
Блок 1 задатчиков (см. фиг.1) может быть представлен задатчиком 17, первый вход которого соединен с источником 18 контролируемого параметра, второй вход с командоаппаратом 19 и задатчиком 20. Источник 18 контролируемого параметра является источником питания поверяемого прибора. Командоаппарат 19 служит для задания в соответствии с программой поверки соответствующего значения контролируемого параметра. Задатчик 17 служит для формирования по сигналу, поступающему на его вход с командоаппаратом 19, заданного значения контролируемого поверяемым прибором параметра. Задатчик 20 служит для задания значений радиусов вращения датчиков положения стрелки в соответствии с типом поверяемого прибора. В качестве задатчика 17, источника 18 контролируемого параметра, командоаппарата 19 могут быть использованы аналогичные элементы, используемые в устройстве, принятом в качестве прототипа.
Задатчик 20 может быть реализован с помощью потенциометрических преобразователей, преобразующих неэлектрические входные величины-радиусы датчиков положения стрелки в электрическое напряжение.
Механизм 5 перемещения кинематически связан с датчиками 6 и 13 положения стрелки и служит для перемещения датчиков 6 и 13 положения стрелки относительно стрелки поверяемого прибора 2 (см. фиг.1). В качестве механизма 5 перемещения может быть принят асинхронный электрический двигатель типа УАД-44. Датчики 6 и 13 положения стрелки, кинематически соединенные с механизмом 5 перемещения, при своем вращении формируют сигналы в момент пересечения ими стрелки поверяемого прибора 2. В качестве датчиков 6 и 13 положения стрелки может быть использована оптико-электронная система, имеющая возможность кругового вращения и состоящая из светодиодов типа АЛ-107З и фотодиодов типа ФД-27К, которые перемещаются относительно стрелки поверяемого прибора и установлены под углом к ней и друг к другу так, что поток лучистой энергии, исходящей из светодиода, в случае пересечения им стрелки поверяемого прибора 2 даст импульс на фотодиод.
Генератор 7 калиброванной частоты по сигналу, поступающему на вход с механизма 5 перемещения, формирует сигналы калиброванной частоты. Генератор 7 калиброванной частоты может быть реализован с помощью фотоэлектрического считывающего устройства (светодиод типа АЛ-107Б и фотодиод типа ФД-27К) и кодирующего диска, жестко посаженного на вал электродвигателя механизма 5 перемещения. По периферии кодирующего диска равномерно распределены отверстия. Светодиод и фотодиод устанавливаются противоположно друг другу против отверстия кодирующего диска.
Включатель 11 формирует сигнал начала поверки прибора. В качестве включателя 11 может быть принят аналогичный элемент, применяемый в устройстве, принятом в качестве прототипа.
Собирательная схема 12 предназначена для собирания сигналов, поступающих на ее входы с выхода включателя 11 и выхода второго датчика 13 положения стрелки.
Первый триггер 10 по сигналу, поступающему на второй, сбросовый вход с выхода включателя 11, соответствующему началу съема показаний, сигналу, поступающему на первый, установочный вход с выхода первого датчика 6 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора первым датчиком 6 положения стрелки, формирует сигнал разрешения счета.
Второй триггер 14 по поступающим на первый, сбросовый вход через собирательную схему 12 с выхода включателя 11 сигналу, соответствующему началу поверки прибора 2, с выхода второго датчика 12 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 вторым датчиком 13 положения стрелки, сигналу, поступающему на второй, установочный вход с выхода первого датчика 6 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора первым датчиком 6 положения стрелки, формирует сигнал разрешения регистрации информации о исходном (нулевом) положении стрелки поверяемого прибора.
Логическая схема И 8 по сигналам, поступающим на первый вход с генератора 7 калиброванной частоты и поступающему на второй вход с выхода первого триггера 10 сигналу разрешения счета, формирует сигнал, частота которого равна калиброванной частоте. В качестве логической схемы И 8 может быть принята аналогичная схема, применяемая в устройстве, принятом в качестве прототипа.
Блок 9 памяти по сигналам, поступающим на первый вход с выхода логической схемы И 8, сигналам, поступающим на второй вход с выхода первого датчика 6 положения стрелки, сигналам, поступающим на третий вход с выхода второго триггера 10, сигналам, поступающим на четвертый вход с выхода второго датчика 13 положения стрелки, сигналам, поступающим на пятый вход с выхода второго триггера 14, регистрирует и запоминает информацию о исходном (нулевом) и о текущем положениях стрелки поверяемого прибора.
Блок 9 памяти может быть представлен первым регистром 21, вход которого соединен с выходом первого ключа 22 перезаписи, первый вход которого соединен по второму входу блока 9 памяти с первым датчиком 6 положения стрелки, а второй вход с выходом счетчика 23 и с первым входом второго ключа 24 перезаписи, выход которого соединен с входом второго регистра 25, а второй вход по четвертому входу блока 9 памяти с вторым датчиком 13 положения стрелки и с первым входом третьего ключа 26 перезаписи, выход которого соединен с входом третьего регистра 27, второй вход по пятому входу блока 9 памяти с выходом второго триггера 14, а третий вход с выходом счетчика 23, счетный вход которого соединен по первому входу блока 9 памяти с выходом логической схемы И 8, а сбросовый вход по третьему входу блока 9 памяти с выходом первого триггера 10.
Счетчик 23 по сигналу сброса, поступающему на его сбросовый вход по третьему входу блока 9 памяти с выхода первого триггера 10, сбрасывается в исходное, нулевое состояние, а по сигналам, поступающим на счетный вход по первому входу блока 9 памяти с выхода логической схемы И 8, производит счет количества приходящих импульсов.
Емкость счетчика 23 должна быть выбрана так, чтобы при заданной частоте сигнала, сформированного генератором 7 калиброванной частоты, происходило обнуление счетчика 23 после полного оборота датчиков 6 и 13 положения стрелки.
Третий ключ 23 перезаписи по сигналу, поступающему на первый вход по четвертому входу блока 9 памяти с второго датчика 13 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 датчиком 13 положения стрелки, сигналу, поступающему на второй вход по пятому входу блока 9 памяти с выхода второго триггера 14, соответствующему разрешению регистрации информации об исходном (нулевом) положении стрелки поверяемого прибора 2, перезаписывает из счетчика 23 в третий регистр 27 информацию об исходном (нулевом) положении стрелки поверяемого прибора 2.
Первый ключ 22 перезаписи по сигналу, поступающему на первый вход по второму входу блока 9 памяти с первого датчика 6 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 датчиком 6 положения стрелки, перезаписывает из счетчика 23 в первый регистр 21 информацию о положении стрелки поверяемого прибора значении угла αa.
Второй ключ 24 перезаписи по сигналу, поступающему на второй вход по четвертому входу блока 9 памяти с второго датчика 13 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 датчиком 13 положения стрелки, перезаписывает из счетчика 23 во второй регистр 25 информацию о положении стрелки поверяемого прибора, соответствующем положению датчика 13 положения стрелки.
Третий ключ 26 перезаписи по сигналу, поступающему на первый вход по четвертому входу блока 9 памяти со второго датчика 13 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 датчиком 13 положения стрелки, сигналу разрешения регистрации информации о исходном, нулевом положении стрелки поверяемого прибора, поступающему на второй вход по пятому входу блока 9 памяти с выхода второго триггера 14, перезаписывает из счетчика 23 в третий регистр 27 информацию о исходном (нулевом) положении стрелки поверяемого прибора.
Регистры 21, 25 и 27 предназначены для оперативного хранения информации о положении стрелки поверяемого прибора, соответствующем положению датчика 6 положения стрелки, информации о положении стрелки поверяемого прибора, соответствующем положению датчика 13 положения стрелки, информации об исходном (нулевом) положении стрелки поверяемого прибора, соответственно.
Блок 15 функциональных преобразователей преобразует в синусоидальные и косинусоидальные значения сигналы, поступающие с соответствующих выходов блока 9 памяти, пропорциональные углам поворота датчиков положения стрелки от исходного положения до пересечения со стрелкой поверяемого прибора.
Блок 19 функциональных преобразователей может быть представлен функциональными преобразователями 28 и 29, 30 и 31, 32 и 33.
Функциональные преобразователи 28 и 29 преобразуют сигнал, поступающий на входы с выхода третьего регистра 27, входящего в состав блока 9 памяти, пропорциональный значению угла αbo, в функции sin αbo и cos αbo соответственно.
Функциональные преобразователи 30 и 31 преобразуют сигнал, поступающий на входы с выхода первого регистра 21, входящего в состав блока 9 памяти, пропорциональный значению угла αa, в функции sin αa и cos αa соответственно.
Функциональные преобразователи 32 и 33 преобразуют сигнал, поступающий на вход с выхода второго регистра 25, входящего в состав блока 9 памяти, пропорциональный значению угла αb, в функции sin αb и cos αb соответственно.
Вычислительный блок 16 (см. фиг.3) по сигналам, поступающим на первые входы с соответствующих выходов блока 15 функциональных преобразователей, пропорциональным функциям sin αbo cos αbo, sin αa, cos αa sin αb, cos αb, сигналам, поступившим на второй вход по третьему выходу блока 1 задатчиков с задатчика 20, пропорциональным заданным значениям радиусов вращения датчиков 6 и 13 положения стрелки, вычисляют угол между исходным (нулевым) и текущим положениями стрелки поверяемого прибора угол β.
Вычислительный блок 16 может быть выполнен с помощью электронных моделирующих устройств.
На фиг.3 приведена внутренняя структура вычислительного блока 16, выполненного с помощью электронных моделирующих устройств.
Вычислительный блок 16 состоит из умножителей 34, 36, 38, 40, 43, 44, 45, 48, 49, 50, 51, 53, 54 и 55, сумматоров 37, 41, 47, 58, 60 и 61, квадраторов 35 и 39, инверторов 42, 46, 52 и 59, делителя 56 и нелинейного элемента 57.
Первый вход первого умножителя 34 соединен с выходом первого квадратора 35 и первым входом второго умножителя 36, а выход -с первым входом первого сумматора 37, второй вход которого соединен с выходом третьего умножителя 38, первый вход которого соединен с выходом второго квадратора 39 и первым входом четвертого умножителя 40, а второй вход с выходом второго сумматора 41, первый вход которого соединен через первый инвертор 42 с выходом пятого умножителя 43, а второй вход с выходом шестого умножителя 44, первый вход которого соединен с первым входом седьмого умножителя 45 и через второй инвертор 46 -с первым входом третьего сумматора 47, а второй вход с первым входом восьмого умножителя 48, с первым входом девятого умножителя 49, с первым входом десятого умножителя 50, второй вход которого соединен со вторым входом первого умножителя 34, и первым входом одиннадцатого умножителя 51, а выход через третий инвертор 52 с вторым входом третьего сумматора 47, третий вход которого соединен с выходом двенадцатого умножителя 53, а выход с первым входом тринадцатого умножителя 54, второй и третий входы которого соединены с первым и вторым соответственно входами четырнадцатого умножителя 55, а выход с третьим входом первого сумматора 37, выход которого соединен с первым входом делителя 56, выход которого соединен с нелинейным элементом 57, а второй вход с выходом четвертого сумматора 58, первый вход которого соединен через четвертый инвертор 59 с выходом четырнадцатого умножителя 55, второй вход с выходом второго умножителя 36, а третий вход с выходом четвертого умножителя 40, второй вход которого соединен с выходом пятого сумматора 60, первый вход которого соединен с выходом девятого умножителя 49, а второй вход с выходом седьмого умножителя 45, второй вход которого соединен с первым входом пятого умножителя 43, первым входом двенадцатого умножителя 53, и вторым входом десятого умножителя 51, выход которого соединен с первым входом шестого сумматора 61, выход которого соединен с третьим входом четырнадцатого умножителя 55, второй вход с вторым входом пятого умножителя 43 и вторым входом девятого умножителя 49, а третий вход с выходом восьмого умножителя 48, второй вход которого соединен со вторым входом умножителя 36 и вторым входом двенадцатого умножителя 53.
Первый квадратор 35 и второй квадратор 39 возводят в квадрат аргументы R и r соответственно, поступающие по второму входу вычислительного блока 14 и третьему выходу блока 1 задатчиков с задатчика 20.
Первый умножитель 34 умножает функцию sin αa, поступающую на второй вход по первому входу вычислительного блока 16 и соответствующему выходу блока 15 функциональных преобразователей с функционального преобразователя 30 на функцию R2, поступающую на первый вход с выхода первого квадратора 35.
Пятый умножитель 43 умножает функцию sin αbo на функцию cos αb, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 28 и 33 соответственно.
Первый инвертор 43 изменяет знак функции sin αbo cosαb, поступающей с выхода пятого умножителя 43.
Шестой умножитель 44 умножает функцию sinαb на функцию cosαbo, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей 32 и 29 соответственно.
Второй сумматора 41 суммирует выражение sin αb cosαbo, поступающее на второй вход с выхода шестого умножителя 44, с выражением (-sin αbo˙cos αb), поступающим на первый вход с выхода первого инвертора 42.
Третий умножитель 38 умножает выражение r2, поступающее не первый вход с выхода второго квадратора 39, на выражение (sinαb ˙cosαbo-sinαbcosαbo ), поступающее на второй вход с выхода второго сумматора 41.
Двенадцатый умножитель 53 умножает функцию sin αbo на функцию cosαa, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 28 и 31 соответственно.
Второй инвертор 46 изменяет знак функции sinαb, поступающей по первому входу вычислительного блока 16 и соответствующему выходу блока 16 функциональных преобразователей с функционального преобразователя 32.
Десятый умножитель 50 умножает функцию sin αa на функцию cos αbo, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 50 функциональных преобразователей с функциональных преобразователей 30 и 29 соответственно.
Третий инвертор 52 изменяет знак функции sin αacos αbo, поступающей с выхода десятого умножителя 50.
Третий сумматор 47 суммирует выражение (sin αbo cos αa), поступающее на третий вход с выхода двенадцатого умножителя 53, с выражением (-sinαa cos αbo), поступающим на второй вход с выхода третьего инвертора 52, и с функцией (-sin αa), поступающей на первый вход с выхода второго инвертора 46.
Тринадцатый умножитель 54 умножает выражение (sin αbo cos αa -sin αb-sin αa cos αbo), поступающее на первый вход с выхода третьего сумматора 7, на аргументы r и R, поступающие на второй и третий соответственно входы по второму входу вычислительного блока 16 и третьему выходу блока 1 задатчиков с задатчика 20.
Первый сумматор 37 суммирует выражение r2(sin αbocos αbo-sin αbocos αb), поступающее на второй вход с выхода третьего умножителя 38, с выражением rR(sin αbocos αa-sin αb-sin αacos αbo), поступающим на третий вход с выхода тринадцатого умножителя 54, и с выражением R2sin αa, поступающим на первый вход с выхода первого умножителя 34.
Второй умножитель 36 умножает функцию cosαa, поступающую на второй вход по первому входу вычислительного блока 16 и соответствующему выходу блока 15 функциональных преобразователей с функционального преобразователя 31, на функцию R2, поступающую на первый вход с выхода первого квадратора 35.
Девятый умножитель 49 умножает функцию cos αbo на функцию cosαb, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 29 и 33 соответственно.
Седьмой умножитель 45 умножает функцию sin αbo на функцию sin αb, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 28 и 32 соответственно.
Пятый сумматор 60 суммирует выражение cos αbocos αb, поступающее не первый вход с выхода девятого умножителя 49, с выражением sin αbosin αb, поступающим на второй вход с выхода седьмого умножителя 45.
Четвертый умножитель 40 умножает выражение r2, поступающее на первый вход с выхода второго квадратора 39, на выражение (cos αbocos αb+sin αbosin αb), поступающее на второй вход с выхода пятого сумматора 60.
Одиннадцатый умножитель 51 умножает функцию sin αbo на функцию sin αa, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блоков 15 функциональных преобразователей с функциональных преобразователей 28 и 30 соответственно.
Восьмой умножитель 48 умножает функцию сos αa на функцию cos αbo, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей, с функциональных преобразователей 31 и 29 соответственно.
Шестой сумматор 61 суммирует выражение cos αbo cos αa, поступающее на третий выход с выхода восьмого умножителя 48, с выражением sin αbosin αa, поступающим на первый вход с выхода одиннадцатого умножителя 51, и с выражением cos αb, поступающим на второй вход по первому входу вычислительного блока 16 и соответствующему выходу блока 15 функциональных преобразователей с функционального преобразователя 33.
Четырнадцатый умножитель 55 умножает выражение (cos αbo cos αa +cos αb+ +sin αbosin αa), поступающее на третий вход с выхода шестого сумматора 61, на аргументы r и R, поступающие на первый и второй, соответственно, входы по второму входу вычислительного блока 16 и третьему выходу блока 1 задатчиков с задатчика 20.
Четвертый инвертор 59 изменяет знак функции rR(cos αbocos αa+сos αb+ +sin αbosin αa), поступающей с выхода четырнадцатого умножителя 55.
Четвертый сумматор 58 суммирует выражение r2(cos αbocos αb+sin αbosin αb), поступающее на третий вход с выхода четвертого умножителя 40, с выражением [rR(cosαbocosαa+cosαb+sinαbosinαa)] поступающим на первый вход с выхода четвертого инвертора 59, и с выражением R2cos αa, поступающим на второй вход с выхода второго умножителя 36. Делитель 56 делит выражение R2sinαa+r2(sinαbcosαbo-sinαbocosαb)+ +rR(sinαbocosαa-sinαb-sinαacosαbo), поступающее на первый вход с выхода первого сумматора 37, на выражение R2cos αa+ r2(cosαbocosαb+sinαbosinαb)- -rR(cosαbocosαa<%0>+cosαb+sinαbosinαa), поступающее на второй вход с выхода четвертого сумматора 58.
Нелинейный элемент 57 с помощью выражения поступающего на вход с выхода делителя 56, определяет в соответствии с уравнением 3 аргумент β угол между исходным (нулевым) и текущим положением стрелки поверяемого прибора.
поступающего на вход с выхода делителя 56, определяет в соответствии с уравнением 3 аргумент β угол между исходным (нулевым) и текущим положением стрелки поверяемого прибора.
Блок 3 сравнения сравнивает информацию о текущем положении стрелки поверяемого прибора, поступающую на второй вход и выход вычислительного блока 16 с нелинейного элемента 57, с информацией о заданной величине контролируемого параметра, поступающей на первый вход по второму выходу блока 1 задатчиков, с командоаппарата 19, и при несоответствии текущего положения стрелки заданной величине контролируемого параметра формирует сигнал рассогласования.
Блок 4 индикации служит для индикации сигнала рассогласования, поступающего с выхода блока 3 сравнения.
В качестве блока 3 сравнения и блока 4 индикации могут быть использованы аналогичные элементы, используемые в устройстве, принятом в качестве прототипа.
Поверку стрелочного прибора с помощью предлагаемого устройства рассмотрим на примере поверки стрелочного манометра.
Непосредственно перед началом поверки включается электрический двигатель механизма 5 перемещения. В результате этого датчики 6 и 13 положения стрелки, кинематически соединенные с механизмом 5 перемещения, получают вращательное движение, а генератор 7 калиброванной частоты формирует сигналы калиброванной частоты.
Пусть датчики 6 и 13 положения стрелки находятся на одной прямой по отношению к их оси вращения точки О, а радиус вращения датчика 6 положения стрелки R больше радиуса вращения r датчика 13 положения стрелки, т.е. имеет место неравенство:
R>r. (4)
Далее датчики 6 и 13 положения стрелки устанавливают в рабочее положение в непосредственной близости от защитного стекла поверяемого прибора 2.
После установки датчиков 6 и 13 положения стрелки в рабочее положение нажимают включатель 11, который формирует сигнал начала поверки прибора.
Сигнал начала поверки прибора 2 поступает с включателя 11 на второй сбросовый вход первого триггера 10, сбрасывая первый триггер 10 в нулевое состояние. При сбросе в нулевое состояние триггер 10 формирует сигнал сброса, поступающий на сбросовый вход счетчика 23, входящего в состав блока 9 памяти.
Счетчик 23 по сигналу сброса, поступающему на сбросовый вход по третьему входу блока 9 памяти с выхода первого триггера 10, сбрасывается в исходное нулевое состояние.
Одновременно с этим сигнал начала поверки прибора 2 поступает с включателя 11 через собирательную схему 12 на первый, сбросовый вход второго триггера 14, сбрасывая второй триггер 14 в нулевое состояние.
Заметим, что на поверяемый манометр еще не подано давление, поэтому стрелка находится в исходном (нулевом) положении (см. фиг.2).
Первый датчик 6 положения стрелки, кинематически соединенный с механизмом 5 перемещения, при своем вращении формирует сигнал в момент пересечения стрелки поверяемого прибора 2.
Триггеры 10 и 14 под действием поступающего на их установочные входы с выхода датчика 6 положения стрелки сигнала, соответствующего исходному (нулевому) положению стрелки поверяемого прибора 2, формируют сигнал разрешения счета и сигнал разрешения регистрации информации об исходном (нулевом) положении стрелки поверяемого прибора 2 соответственно.
Логическая схема И 8 по сигналам, поступающим на первый вход с генератора 7 калиброванной частоты, и поступающему на второй вход с выхода первого триггера 10 сигналу разрешения счета формирует сигнал, частота которого равна калиброванной частоте.
Счетчик 23, входящий в состав блока 9 памяти, по сигналам, поступающим на счетный вход по первому входу блока 9 памяти с выхода логической схемы И 8, производит счет количества приходящих импульсов.
Далее, датчик 13 положения стрелки, кинематически соединенный с механизмом 5 перемещения, при своем вращении формирует сигнал в момент пересечения стрелки поверяемого прибора 2.
Третий ключ 26 перезаписи по сигналу, поступающему на первый вход по четвертому входу блока 9 памяти с выхода второго датчика 13 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 вторым датчиком 13 положения стрелки, сигналу разрешения регистрации информации об исходном (нулевом) положении стрелки поверяемого прибора, поступающему на второй вход по пятому входу блока 9 памяти с выхода второго триггера 14, перезаписывает из счетчика 23 в третий регистр 27 информацию об исходном (нулевом) положении стрелки поверяемого прибора.
Второй триггер 14 по сигналу, поступающему на сбросовый вход через собирательную схему 12 с выхода второго датчика 13 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 датчиком 13 положения стрелки, переходит вновь в исходное нулевое состояние.
Таким образом, в пределах одного оборота датчиков 6 и 13 положения стрелки вокруг своего центра вращения точки О в блоке 9 памяти происходит запоминание информации о исходном (нулевом) положении стрелки поверяемого прибора 2 величины угла αbo- угла между лучом Ох и радиусом ОВо.
Заметим, что луч Ох полярной системы координат проходит через т. О-центр вращения датчиков положения стрелки и через т. Ао точку пересечения стрелки поверяемого прибора датчиком 6 положения стрелки при исходном нулевом положении стрелки поверяемого прибора 2.
Далее в соответствии с программой поверки с помощью командоаппарата 19 и задатчика 17 по первому выходу блока 1 задатчиков заданная величина давления воздуха подается в поверяемый манометр. Под действием этого давления стрелка поверяемого прибора 2 отклонится от своего исходного нулевого положения на угол β Величина этого отклонения будет соответствовать заданной величине давления воздуха.
При принятом расположении датчиков 6 и 13 положения стрелки относительно шкалы поверяемого прибора 2 (см. фиг.2) стрелку поверяемого прибора 2 вначале пересечет первый датчик 6 положения стрелки, а затем второй датчик 13 положения стрелки.
Первый ключ 22 перезаписи по сигналу, поступающему на первый вход по второму входу блока 9 памяти с выхода первого датчика 6 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 первым датчиком 6 положения стрелки, перезаписывает из счетчика 23 в первый регистр 21 информацию о положении стрелки поверяемого прибора значение угла αa. Второй ключ 24 перезаписи по сигналу, поступающему на второй вход по четвертому входу блока 9 памяти с выхода второго датчика 13 положения стрелки, соответствующему моменту пересечения стрелки поверяемого прибора 2 датчиком 13 положения стрелки, перезаписывает из счетчика 23 во второй регистр 25 информацию о положении стрелки поверяемого прибора значении угла αb.
Функциональные преобразователи 28 и 29, входящие в состав блока 15 функциональных преобразователей, сигнал, поступающий с выхода третьего регистра 27, входящего в состав блока 9 памяти, пропорциональный значению угла αbo, преобразуют в функцию sin αbo и cos αbo соот- ветственно.
Функциональные преобразователи 30 и 31, входящие в состав блока 15 функциональных преобразователей, сигнал, поступающий с выхода первого регистра 21, входящего в состав блока 9 памяти, пропорциональный значению угла αa, преобразуют в функции sin αa и cos αaсоответственно.
Функциональные преобразователи 32 и 33, входящие в состав блока 15 функциональных преобразователей, сигнал, поступающий с выхода второго регистра 25, входящего в состав блока 9 памяти, пропорциональный значению угла αb, преобразуют в функции sin αb и cos αbсоответственно. Вычислительный блок 16 по сигналам, поступающим на первые входы с соответствующих выходов блока 15 функциональных прео- бразователей, пропорциональным функциям sinαbo,cosαbo, sinαa, cosαa,sinαb, cos αb, сигналам, поступившим на второй вход по третьему выходу блока 1 задатчиков с задатчика 20, пропорциональным заданным значениям радиусов вращения датчиков 6 и 13 положения стрелки, вычисляет угол между исходным (нулевым) и текущим положением стрелки поверяемого прибора угол β.
При этом первый квадратор 35 и второй квадратор 39 возводят в квадрат аргументы R и r соответственно, поступающие по второму входу вычислительного блока 16 и третьему выходу блока 1 задатчиков с задатчика 20.
Первый умножитель 34 умножает функцию sin αb, поступающую на второй вход по первому входу вычислительного блока 16 и соответствующему выходу блока 15 функциональных преобразователей с функционального преобразователя 30, на функцию R2, поступающую на первый вход с выхода первого квадратора 35.
Пятый умножитель 43 умножает функцию sin αbo на функцию cos αb, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 28 и 33 соответственно.
Первый инвертор 43 изменяет знак функции sin αbo cos αb, поступающей с выхода пятого умножителя 43.
Шестой умножитель 44 умножает функцию sin αb на функцию сos αbo, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 32 и 29 соответственно.
Второй сумматор 41 суммирует выражение sin αb cos αbo, поступающее на второй вход с выхода шестого умножителя 44, с выражением (-sin αacos αb), поступающим на первый вход с выхода первого инвертора 42.
Третий умножитель 38 умножает выражение r2, поступающее на первый вход с выхода второго квадратора 39, на выражение (sinαbcosαbo-sinαbocosαb), поступающее на второй вход с выхода второго сумматора 41.
Двенадцатый умножитель 53 умножает функцию sin αbo на функцию cos αa, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 28 и 31 соответственно.
Второй инвертор 46 изменяет знак функции sin αb, поступающей по первому входу вычислительного блока 16 и соответствующему выходу блока 15 функциональных преобразователей с функционального преобразователя 32.
Десятый умножитель 50 умножает функцию sin αa на функцию cos αbo, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 30 и 29 соответственно.
Третий инвертор 52 изменяет знак функции sin αa cos αbo, поступающей с выхода десятого умножителя 50.
Третий сумматор 47 суммирует выражение sin αbocos αa, поступающее на третий вход с выхода двенадцатого умножителя 53, с выражением (-sin αacos αbo), поступающим на второй вход с выхода третьего инвертора 52, и с функцией (-sin αb), поступающей на первый вход с выхода второго инвертора 46.
Тринадцатый умножитель 54 умножает вы- ражение (sin αbocos αa-sin αb-sin αa cos αbo), поступающее на первый вход с выхода третьего сумматора 47, на аргументы r и R, поступающие на второй и третий соответственно входы, по второму входу вычислительного блока 16 и третьему выходу блока 1 задатчиков с задатчика 20.
Первый сумматор 37 суммирует выражение r2(sin αbcos αbo-sin αbocos αb), поступающее на второй вход с выхода третьего умножителя 38, с выражением rR(sin αbocos αa-sin αb-sin αacos αbo), поступающим на третий вход с выхода тринадцатого умножителя 54, и с выражением R2sinα поступающим на первый вход с выхода первого умножителя 34.
Второй умножитель 36 умножает функцию cos αa, поступающую на второй вход по первому входу вычислительного блока 16 и соответствующему выходу блока 15 функциональных преобразователей с функционального преобразователя 31, на функцию R2, поступающую на первый вход с выхода первого квадратора 35.
Девятый умножитель 49 умножает функцию cos αbo на функцию cos αb, поступающие по первым входам вычислительного блока 16, и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 29 и 33 соответственно.
Седьмой умножитель 45 умножает функцию sin αbo на функцию sin αb, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 28 и 32 соответственно.
Пятый сумматор 60 суммирует выражение cos αbocos αb, поступающее на первый вход с выхода девятого умножителя 49, с выражением sin αbosin αb, поступающим на второй вход с выхода седьмого умножителя 45.
Четвертый умножитель 40 умножает выражение r2, поступающее на первый вход с выхода второго квадратора 39, на выражение (cos αbocos αb+sin αbosin αb), поступающее на второй вход с выхода пятого сумматора 60.
Одиннадцатый умножитель 51 умножает функцию sin αbo на функцию sin αa, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 28 и 30 соответственно.
Восьмой умножитель 48 умножает функцию cos αa на функцию cos αbo, поступающие по первым входам вычислительного блока 16 и соответствующим выходам блока 15 функциональных преобразователей с функциональных преобразователей 31 и 29 соответственно.
Шестой сумматор 61 суммирует выражение cos αbocos αa, поступающее на третий вход с выхода восьмого умножителя 48, с выражением (sin αbosin αa), поступающим на первый вход с выхода одиннадцатого умножителя 51, и с выражением сos αb, поступающим на второй вход по первому входу вычислительного блока 16 и соответствующему выходу блока 15 функциональных преобразователей с функционального преобразователя 33.
Четырнадцатый умножитель 55 умножает выражение (cos αbocosαa+cos αb+ +sin αbosin αa), поступающее на третий вход с выхода шестого сумматора 61, на аргументы r и R, поступающие на первый и второй соответственно входы по второму входу вычислительного блока 16 и третьему выходу блока 1 задатчиков и задатчика 20.
Четвертый инвертор 59 изменяет знак функции rR(cos αbocos αa+cos αb+sin αbosin αa), поступающей с выхода четырнадцатого умножителя 55.
Четвертый сумматор 58 суммирует выражение r2(cos αbocos αb+sin αbosin αb), поступающее на третий вход с выхода четвертого умножителя 40, с выражением [-rR(cos αbocos αa+cos αb+sin αbosin αa)] поступающим на первый вход с выхода четвертого инвертора 59, и с выражением R2cos αa, поступающим на второй вход с выхода второго умножителя 36.
Делитель 48 делит выражение R2sin αa+r2(sinαbcos αbo-sin αbocos αb+ +rR(sin αbocos αa-sin αb-sin αacos αbo), поступающее на первый вход с выхода первого сумматора 37, на выражение R2cos αa+ r(cos αbocos αb+sin αbosinαb)-rR(cos αbocos αa+sin αbosin αa), поступающее на второй вход с выхода четвертого сумматора 58.
Нелинейный элемент 57 с помощью выражения поступившего на вход с выхода делителя 56, определяет в соответствии с уравнением (3) аргумент β угол между исходным (нулевым) и текущем положением стрелки поверяемого прибора 2.
поступившего на вход с выхода делителя 56, определяет в соответствии с уравнением (3) аргумент β угол между исходным (нулевым) и текущем положением стрелки поверяемого прибора 2.
Блок 3 сравнения сравнивает информацию о текущем положении стрелки поверяемого прибора, поступающую на второй вход и выход вычислительного блока 16 с нелинейного элемента 57, с информацией о заданной величине контролируемого параметра, поступающей на первый вход по второму выходу блока 1 задатчиков с командоаппарата 19, и при несоответствии текущего положения стрелки заданной величине контролируемого параметра формирует сигнал рассогласования.
Поступающий с выхода блока 3 сравнения сигнал рассогласования индицируется блоком 4 индикации. После поверки прибора при одном значении давления воздуха с помощью командоаппарата 19, входящего в состав блока 1 задатчиков, в поверяемом приборе 2 вновь изменяется давление. Под действием этого давления стрелка поверяемого прибора 2 займет новое положение. Первый ключ 22 перезаписи по сигналу, поступающему с первого датчика 6 положения стрелки, второй ключ 24 перезаписи по сигналу, поступающему с второго датчика 13 положения стрелки, перезаписывают из счетчика 23 в первый регистр 21 и второй регистр 25 соответственно информацию о новом положении стрелки поверяемого прибора. Блок 15 функциональных преобразователей сигналы, поступающие с соответствующих выходов блока 9 памяти, пропорциональные углам поворота датчиков 6 и 13 положения стрелки от исходного положения до пересечения со стрелкой поверяемого прибора, преобразуют в синусоидальные и косинусоидальные значения, а вычислительный блок 16 определяет новое значение угла отклонения стрелки поверяемого прибора. Таким образом, все последующие поверки осуществляются аналогично первой.
По окончании поверки данного прибора датчики 6 и 13 положения стрелки устанавливают в рабочее положение у очередного подлежащего поверке прибора. В случае изменения типоразмера поверяемого прибора изменяют радиусы вращения датчиков 6 и 13 положения стрелки и с помощью задатчика 20, входящего в состав блока 1 задатчиков, задают новые значения радиусов вращения датчиков положения стрелок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости движения транспортного средства | 1983 |
|
SU1117679A1 |
| Устройство для поверки манометров | 1983 |
|
SU1164566A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1982 |
|
SU1056257A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU959142A1 |
| Устройство для обучения огранщика | 1983 |
|
SU1113835A1 |
| Устройство автоматического контроля состояния роликов и растворов между ними роликовой зоны машины непрерывного литья заготовок | 1983 |
|
SU1169788A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УДАЛЕННОСТИ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ В ТЯГОВОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННОГО ТРАНСПОРТА (ВАРИАНТЫ) | 1998 |
|
RU2181672C2 |
| Устройство для регулирования скорости движения транспортного средства | 1980 |
|
SU886036A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УДАЛЕННОСТИ КОРОТКОГО ЗАМЫКАНИЯ КОНТАКТНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2001 |
|
RU2189606C1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |


Изобретение относится к автоматизации контрольно-измерительных операций, а именно к поверке стрелочных приборов, и направлено на повышение точности считывания показателей поверяемого прибора за счет исключения погрешности от несовпадения центра вращения датчика положения стрелки с центром вращения стрелки поверямого прибора. Для этого в устройство, содержащее блок задатчиков, первый выход которого соединен с поверяемым прибором, а второй с первым входом блока сравнения, выход которого соединен с входом блока индикации, а также механизм перемещения, соединенный с входами первого датчика положения стрелки и генератора калиброванной частоты, выход которого соединен с первым входом логической схемы И, выход которой соединен с первым входом блока памяти, второй вход которого соединен с выходом первого датчика положения стрелки, а третий с вторым входом логической схемы И и выходом первого триггера, первый вход которого соединен с выходом включателя, дополнительно введены второй датчик положения стрелки, второй триггер, собирательная схема, блок функциональных преобразователей и вычислительный блок, причем первый вход собирательной схемы соединен с выходом включателя, второй вход с четвертым входом блока памяти, и через второй датчик положения стрелки с выходом механизма перемещения, а выход с первым входом второго триггера, второй вход которого соединен с выходом первого датчика положения стрелки, а выход с пятым входом блока памяти, выходы которого соединены с соответствующими входами блока функциональных преобразователей, выходы которого соединены с соответствующими первыми входами вычислительного блока, второй вход которого соединен с третьим выходом блока задатчиков, а выход с вторым входом блока сравнения. 3 ил.
УСТРОЙСТВО ДЛЯ ПОВЕРКИ МАНОМЕТРОВ, содержащее блок задатчиков, блок сравнения, блок индикации, механизм перемещения, первый датчик положения стрелки, генератор калиброванной частоты, блок памяти, логическую схему И, первый триггер и включатель, при этом первый выход блока задатчиков выполнен с возможностью соединения с поверяемым прибором, второй выход блока задатчиков соединен с первым входом блока сравнения, выход которого соединен с блоком индикации, механизм перемещения соединен с входами первого датчика положения стрелки и генератора калиброванной частоты, выход которого соединен с первым входом логической схемы И, выход которой соединен с первым входом блока памяти, второй вход которого соединен с выходом первого датчика положения стрелки, а третий вход с вторым входом логической схемы И и выходом первого триггера, первый вход которого соединен с выходом первого датчика положения стрелки, а второй вход с выходом включателя, отличающееся тем, что оно снабжено вторым датчиком положения стрелки, вторым триггером, схемой ИЛИ, блоком функциональных преобразователей и вычислительным блоком, причем первый вход схемы ИЛИ соединен с выходом включателя, второй вход с четвертым входом блока памяти и через второй датчик положения стрелки с выходом механизма перемещения, выход схемы ИЛИ соединен с первым входом второго григгера, второй вход которого соединен с выходом первого датчика положения стрелки, выход второго триггера соединен с пятым входом блока памяти, выходы которого соединены с соответствующими входами блока функциональных преобразователей, выходы которого соединены с соответствующими первыми входами вычислительного блока, второй вход которого соединен с третьим выходом блока задатчиков, а выход с вторым входом блока сравнения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для поверки манометров | 1983 |
|
SU1164566A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
