Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов.
Цель изобретения - повышение надежности работы и расширение области применения.
На чертеже показана конструкция схвата.
Адаптивный схват манипулятора содержит корпус 1, а также неподвижно закрепленные относительно корпуса пневмоцилиндр 2 и держатели 3, на которых расположены выполненные в виде эластичных баллонов губки 4. Поршень 5 пневмоцилиндра подпружинен пружиной 6 относительно его торца и выполнен в виде полого открытого цилиндра 7 со штоком 8. На торце бесштоковой полости пневмоцилиндра 2 расположен односторонний клапан 9. Пневмоцилиндр снабжен датчиком положения поршня, который может быть выполнен, например, в виде источника 10 и приемника 11 излучения. На боковой поверхности пневмоцилиндра выполнены два отверстия 13 и 12, первое из которых связано с полостями эластичных баллонов посредством трубопровода 14, а второе расположено ближе к торцу пневмоцилиндра и связано с атмосферой. На цилиндре 7 поршня выполнен продольный вырез 15, длина которого больше или равна расстоянию между центрами отверстий 12 и 13 на боковой стенке пневмоцилиндра 2. В зависимости от конкретного технологического применения схват может крепиться к фланцу последнего звена руки манипулятора либо за корпус 1, либо за пневмоцилиндр 2. Для ограничения хода поршня на внутренней поверхности пневмоцилиндра могут быть выполнены выступы 16.
Устройство работает следующим образом.
Схват манипулятора подводится манипулятором робота к детали 17 и перемещается вдоль своей продольной оси, надавливая штоком 8 поршня 5 на деталь 17. Поршень 5, сжимая пружину 6, поднимается к торцу пневмоцилиндра 2. Односторонний клапан 9 закрыт, отверстия 12 и 13 пневмоцилиндра перекрыты цилиндром 7 поршня, во внутренней области пневмоцилиндра создается избыточное давление. При дальнейшем движении схвата вниз, а поршня 5 вверх, вырез 15 и отверстие 13 совмещаются, сжатый воздух из полости пневмоцилиндра по трубопроводу 14 поступает в эластичные баллоны 4 губок схвата, расширяет их и деталь 17 захватывается. Одновременно по сигналу с датчика взаимного положения поршня и пневмоцилиндра - по критической величине тока в светоприемнике 11 - блок управления роботом формирует команду на прекращение дальнейшего схвата в направлении к детали. После окончания захвата рука манипулятора робота перемещает схват с деталью в нужное местоположение, в рабочей зоне манипулятора, устанавливает ее и формируется команда на дальнейшее перемещение пневмоцилиндра к опирающейся (например, на стол) детали.
При дальнейшем движении вырез 15 совмещается с отверстием 12, посредством продольного выреза 15 и отверстий 12 и 13 в пневмоцилиндре 2 полости эластичных губок сообщаются с атмосферой, деталь 17 освобождается от захвата. В это время вновь срабатывает датчик взаимного положения поршня и пневмоцилиндра (по величине тока в светоприемнике 11) и блоком управления движением манипулятора формируется команда на отход схвата вверх от детали. Под действием пружины 6 поршень 5 пневмоцилиндра 2 со своим цилиндром 7 и штоком 8 возвращается в исходное положение. От выпадания из пневмоцилиндра поршень предохраняется выступами 16 в пневмоцилиндре 2. При отходе поршня 5 в исходное положение полость пневмоцилиндра 2 заполняется атмосферным воздухом через односторонний клапан 9. Схват манипулятора готов к захвату следующей детали.
Устройство имеет простую конструкцию, высокую надежность, широкую область применения, не требует подключения к пневмосети или использования дополнительного привода для обеспечения захвата детали, позволяет надежно захватывать детали сложной формы, имеющие неодинаковые свойства по разным направлениям (высокую жесткость и прочность в продольном направлении и хрупкие в поперечном направлении).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА | 1991 |
|
RU2043914C1 |
| Схват | 1982 |
|
SU1060469A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕЙ ОБРАБОТКИ ПЛОСКИХ ДЕТАЛЕЙ | 1991 |
|
RU2028914C1 |
| СПОСОБ ЛАЗЕРНОЙ ПРОШИВКИ ОТВЕРСТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2012464C1 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЙ ИЗ МЕТАЛЛИЧЕСКОГО ПОРОШКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2007280C1 |
| ДОЗАТОР | 1991 |
|
RU2010170C1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| КОНСТРУКЦИЯ ДЕФОРМАЦИОННОГО ШВА МЕЖДУ ПЛИТАМИ ПРОЕЗЖЕЙ ЧАСТИ МОСТА | 1990 |
|
RU2012705C1 |
Использование: машиностроение, в конструкциях схватов промышленных роботов. Сущность изобретения: схват содержит корпус 1, пневмоцилиндр 2, выполненные в виде полых эластичных баллонов зажимные губки 4. На боковой поверхности пневмоцилиндра 2 выполнены два отверстия 12 и 13. Отверстие 13 связано с полостями эластичных баллонов, а отверстие 12 - с атмосферой. Пневмоцилиндр 2 снабжен поршнем 5 с установленным на нем штоком 8 с толкателем. На поршне 5 выполнен продольный вырез 15. Длина продольного выреза 15 больше или равна расстоянию между центрами упомянутых отверстий. При движении схвата вниз, а поршня 5 вверх, вырез 15 и отверстие 13 совмещаеются. Воздух из полости пневмоцилиндра 2 по трубопроводу 14 поступает в эластичные баллоны, которые зажимают деталь 17. Для сброса детали вырез 15 совмещается с отверстием 12 и полости баллонов сообщаются в атмосферой. 1 ил.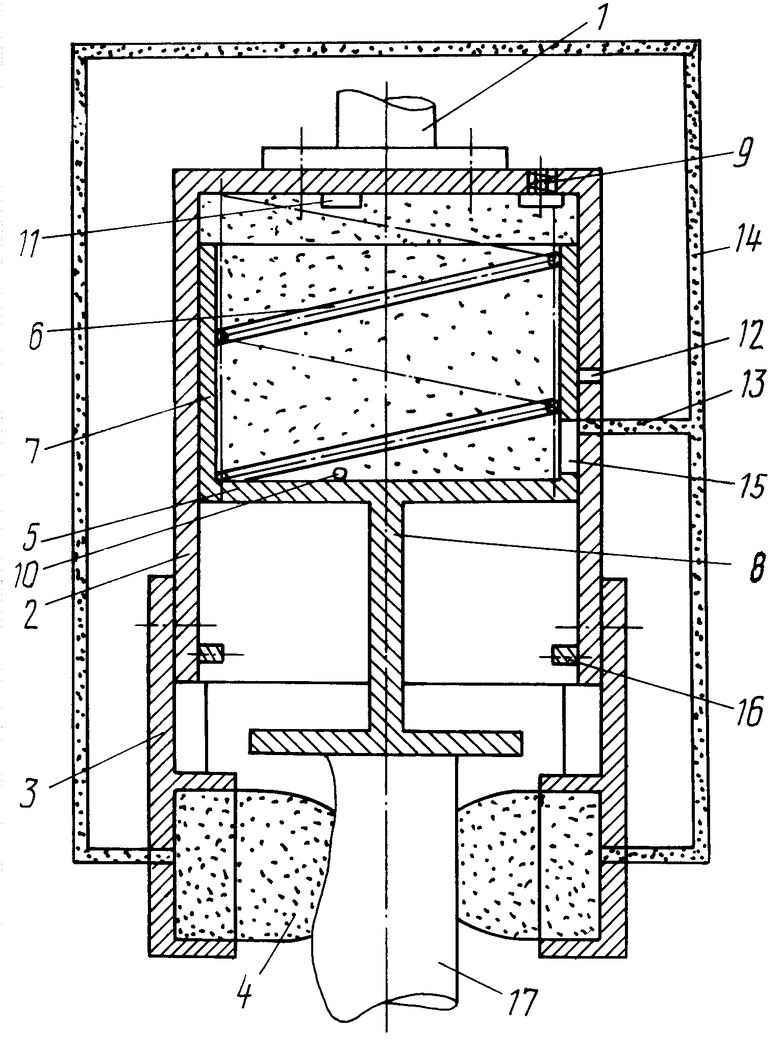
АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА, содержащий корпус, закрепленный на нем пневмоцилиндр и зажимные губки, при этом пневмоцилиндр снабжен поршнем, на котором установлен шток с толкателем, а зажимные губки выполнены в виде полых эластичных баллонов и установлены со стороны штоковой полости пневмоцилиндра, отличающийся тем, что он снабжен односторонним клапаном, расположенным на торце бесштоковой полости пневмоцилиндра, а поршень подпружинен относительно упомянутого торца и выполнен в виде полого, открытого со стороны торца, расположенного в бесштоковой полости цилиндра, причем на боковой поверхности пневмоцилиндра выполнено два отверстия, одно из которых связано с полостями эластичных баллонов, а второе - с атмосферой, при этом на поршне выполнен продольный вырез, длина которого больше или равна расстоянию между центрами упомянутых отверстий.
| ВОЛНОВОДНАЯ СОГЛАСОВАННАЯ НАГРУЗКА | 2015 |
|
RU2601612C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
