Изобретение относится к нелинейной коррекции динамических свойств систем автоматического регулирования и может быть использовано в автоматических системах с управлением от вычислительных машин.
Известен способ коррекции систем регулирования, основанный на формировании корректирующего сигнала отрицательной обратной связи по скорости выходной координаты и суммировании его с форсирующим сигналом, пропорциональным произведению сигналов ошибки и скорости выходной координаты, и с сигналом ошибки [1]
Наиболее близким по технической сущности к предлагаемому изобретению является способ коррекции автоматических систем [2] основанный на формировании корректирующего сигнала отрицательной обратной связи по скорости выходной координаты и суммировании его с ошибкой регулирования и с сигналом, равным произведению сигнала, пропорционального скорости выходной координаты, на второй сигнал, пропорциональный ошибке регулирования. При этом переходный процесс формируют с момента достижения выходной координатой заданного значения.
Известные способы нелинейной коррекции систем автоматического регулирования не позволяют точно сформировать переходный процесс из-за наличия в форсирующем сигнале переменной величины, пропорциональной ошибке регулирования.
Целью изобретения является повышение точности формирования переходного процесса за счет исключения в форсирующем сигнале переменной величины, пропорциональной ошибке регулирования.
Поставленная цель достигается тем, что формируют управляющий сигнал объекта управления путем суммирования сигнала ошибки регулирования и сигнала, равного произведению сигнала, пропорционального скорости выходной координаты, на второй сигнал, причем формируют переходный процесс с момента достижения выходной координатой заданного значения. Для повышения точности формирования переходного процесса второй сигнал произведения формируют пропорциональным требуемому приращению коэффициентов характеристического уравнения замкнутой системы.
Сопоставительный анализ заявляемого технического решения с прототипом показывает, что заявляемый способ отличается от известного тем, что второй сигнал произведения формируют пропорциональным требуемому приращению коэффициентов характеристического уравнения замкнутой системы. Таким образом, заявляемый способ соответствует критерию изобретения "новизна". В известных технических решениях коэффициенты характеристического уравнения замкнутой системы изменяются в функции ошибки, которая, в свою очередь, является функцией времени. Это приводит к тому, что настроенный в начале коэффициент характеристического уравнения на заданный переходный процесс изменяется при движении системы и в результате получается не заданный переходный процесс, а отличный от него. В предлагаемом же изобретении настраиваемый коэффициент характеристического уравнения зависит от сигнала, не зависящего от времени или изменяющегося по заданной программе, что обеспечивает повышение точности формирования переходного процесса. Это позволяет сделать вывод о соответствии заявляемого технического решения критерию изобретения "cущественные отличия".
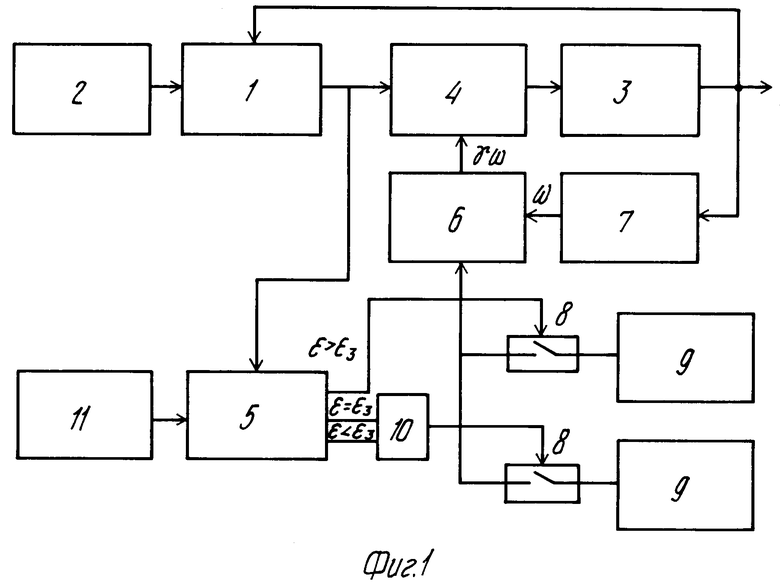
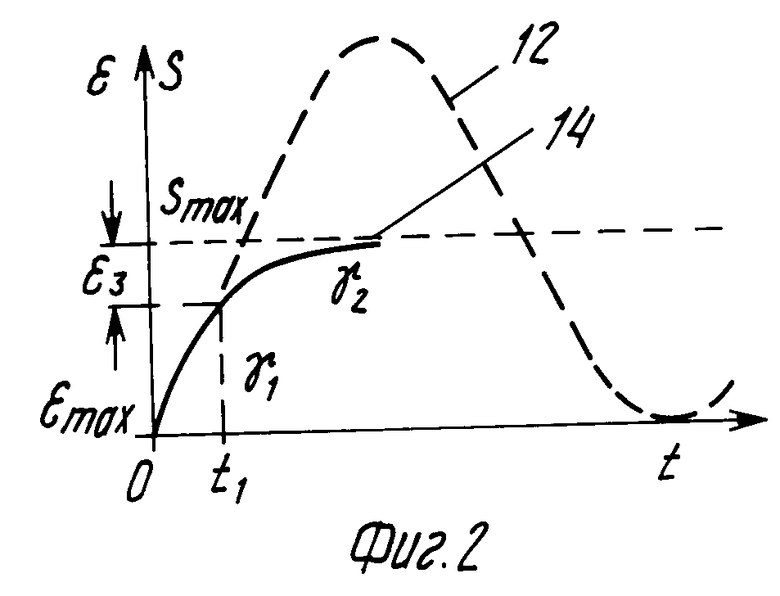
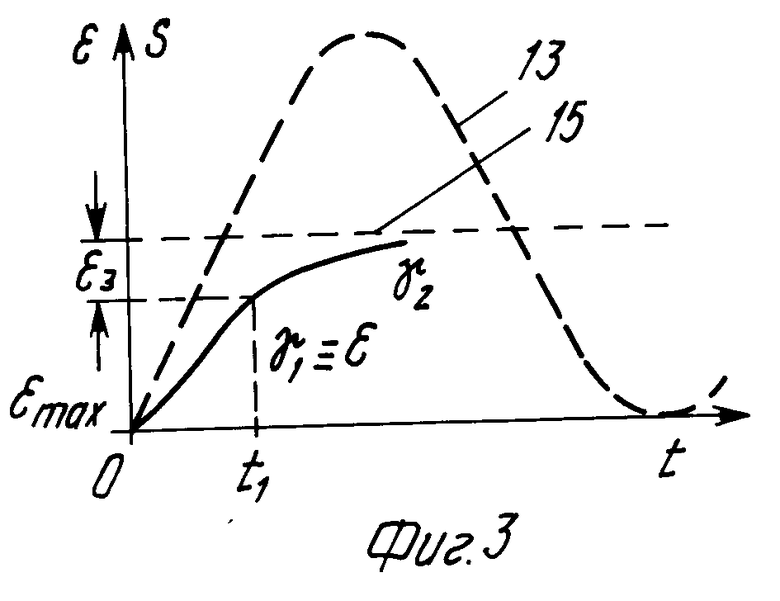
На фиг.1 приведена блок-схема автоматической системы с коррекцией, осуществляемой по предлагаемому способу; на фиг.2 кривая переходного процесса, сформированного по предлагаемому способу; на фиг 3. кривая переходного процесса, сформированного по прототипу.
Система содержит элемент сравнения 1, входы которого подключены к задатчику перемещения 2 и к выходу объекта управления 3, а выход соединен с первым входом сумматора 4 и первым входом компаратора 5. Второй вход сумматора 4 соединен с выходом блока умножения 6, первый вход которого соединен через дифференцирующее звено 7 с выходом объекта управления 3, а второй вход через ключи 8 с задатчиками коэффициентов 9. Первый выход компаратора 5 соединен с управляющим входом первого ключа 8. Второй и третий выходы компаратора 5 соединены через элемент ИЛИ 10 с управляющим входом второго ключа 8. Второй вход компаратора 5 соединен с выходом задатчика 11 момента переключения.
Кривыми 12 и 13 изображен переходный процесс, когда система находится на границе устойчивости (предельное быстродействие).
Кривой 14 изображен переходный процесс, полученный по предлагаемому способу. В начальной стадии процесса кривые 12 и 14 совпадают.
Кривой 15 изображен переходный процесс, полученный по способу, описанному в прототипе.
В начальной стадии процесса кривые 13 и 15 разошлись, это и есть неточность формирования переходного процесса.
Автоматическая система по предлагаемому способу работает следующим образом.
На первый вход сумматора 4 поступает сигнал ошибки ε, снимаемый с элемента сравнения 1. На второй вход сумматора 4 поступает сигнал, пропорциональный произведению угловой скорости вращения ω снимаемого с дифференцирующего звена 7, и сигнала от задатчика коэффициентов 9. Подключение задатчиков 9 происходит ключами 8 в зависимости от соотношения сигнала ε3, снимаемого с задатчика 11 момента переключения, и сигнала ε пропорционального ошибке регулирования. Если ε > ε3, то включается первый ключ 8 и подключается первый задатчик коэффициентов 9 с коэффициентом γ1. Если ε1 ≅ ε3, то включается второй ключ 8 и подключается второй задатчик коэффициентов 9 с коэффициентом γ2.
Таким образом, в зависимости от соотношения величин ε и ε3произведение на выходе блока умножения 6 будет разное ( γ1 ω или γ2 ω ), а это приведет к тому, что характер переходного процесса также будет меняться.
Более подробно действие системы покажем с помощью уравнений.
Предположим, что объект управления 3 описывается дифференциальным уравнением:
(а2p3 + а1p2 + аоp)S(p) KoUy(p), где ао, а1, а2 коэффициенты характеристического уравнения;
S перемещение;
Ко коэффициент;
Uy сигнал задатчика перемещения 9;
p оператор Лапласа, а остальные уравнения запишем согласно структурной схеме (фиг.1):
Uy(p) ε (p) + γ ω (p), где ω (р) PS(p),
ε (p) S3(p) S(p),
ε ошибка перемещения;
γ коэффициент (задатчиков коэффициентов 9);
Sз заданное перемещение.
Решая эту систему уравнений относительно входной и выходной величин, получим:
[a2p3 + a1p2 +(ao +Koγ )p + Ko]S(p) KoSз(p) характеристическое уравнение будет:
a2p3 + a1p2 +(ao + Ko γ ) p+ Ko 0
Согласно критерию устойчивости Гурвица, система будет находиться на границе устойчивости (предельное быстродействие) при положительных коэффициентах характеристического уравнения, если
а1(ао + Ко γ)= а2Ко, отсюда требуемый коэффициент
γ1=  .
.
Чтобы переходный процесс был монотонным (система устойчивая), необходимо выполнение условия а1(ао Ко γ) >> a2Ko, а это можно достичь увеличением коэффициента γ, т.е. γ2 > > γ1.
В начальной фазе отработки задающего сигнала первый ключ 8 замкнут, так как выполняется условие ε > ε3, и на выходе блока умножения 6 появляется сигнал, пропорциональный произведению скорости выходной координаты на γ1. В этом случае система должна находиться на границе устойчивости, происходит разгон с предельной скоростью (фиг. 2, кривая 12 при t < t1). Как только ошибка ε достигает заданной величины ε3(t t1), первый ключ 8 отключается, включается второй ключ 8, и на выходе блока произведения 6 будет сигнал γ2 ω Коэффициент характеристического уравнения замкнутой системы ао + Ко γ2 увеличивается и переходный процесс становится монотонным (фиг.2, кривая 14 при t > t1). Если в характеристическом уравнении вместо коэффициента γ. поставить ошибку ε как это сделано в прототипе, то в начальной фазе отработки задающего сигнала (при t < t1) коэффициент характеристического уравнения (ао + Ко ε ) будет изменяться за счет того, что ε при движении системы уменьшается. А это приведет к тому, что система будет двигаться не по кривой 13, как нам хотелось, а по кривой 15 (см.фиг.3).
Таким образом, использование предлагаемого способа коррекции дает возможность повысить точность формирования переходного процесса. Предложенный способ наиболее легко реализуется при управлении приводом от вычислительной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ИНСТРУМЕНТА МАНИПУЛЯТОРА ОТНОСИТЕЛЬНО ПОВЕРХНОСТИ | 1992 |
|
RU2084820C1 |
| Электропривод переменного тока | 1983 |
|
SU1169128A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ПРОЦЕССОРОВ С ОБЩИМ БЛОКОМ ПАМЯТИ | 1991 |
|
RU2006925C1 |
| Способ управления мощностью двигателя внутреннего сгорания | 1989 |
|
SU1749514A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖНОЙ ПАЙКИ ЭЛЕМЕНТОВ НА ПЕЧАТНОЙ ПЛАТЕ | 1993 |
|
RU2082571C1 |
| МЕХАНИЗМ ШАГОВОГО ПЕРЕМЕЩЕНИЯ С РЕГУЛИРУЕМОЙ ВЕЛИЧИНОЙ РАБОЧЕГО ХОДА | 1992 |
|
RU2050490C1 |
| ФЛЮСОПИТАТЕЛЬ | 1990 |
|
RU2090322C1 |
| ТЕХНОЛОГИЧЕСКИЙ ТРАНСПОРТ ЛИНИИ | 1990 |
|
RU2006356C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ЛЕГКОВЫХ АВТОМОБИЛЕЙ НА ТРАНСПОРТНОЙ ПЛАТФОРМЕ | 1992 |
|
RU2048999C1 |
| ТОПЛИВНЫЙ БАК | 1991 |
|
RU2011553C1 |
Изобретение относится к нелинейной коррекции динамических свойств систем автоматического регулирования и может быть использовано в автоматических системах с управлением от вычислительных машин. Способ основан на формировании управляющего сигнала объекта управления путем суммирования сигнала ошибки регулирования и сигнала, пропорционального произведению скорости регулирования на второй сигнал, изменяемый в момент достижения ошибкой регулирования заданного значения, пропорционально заданному приращению коэффициентов характеристического уравнения замкнутой системы. 3 ил.
СПОСОБ КОРРЕКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, при котором управляющий сигнал создают путем суммирования сигнала ошибки регулирования и сигнала, пропорционального произведению скорости регулирования на второй сигнал, отличающийся тем, что указанный второй сигнал формируют в виде сигнала, изменяемого в момент достижения ошибкой регулирования заданного значения, пропорционально заданному приращению коэффициентов характеристического уравнения замкнутой системы.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ коррекции систем автоматического регулирования | 1976 |
|
SU637781A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
