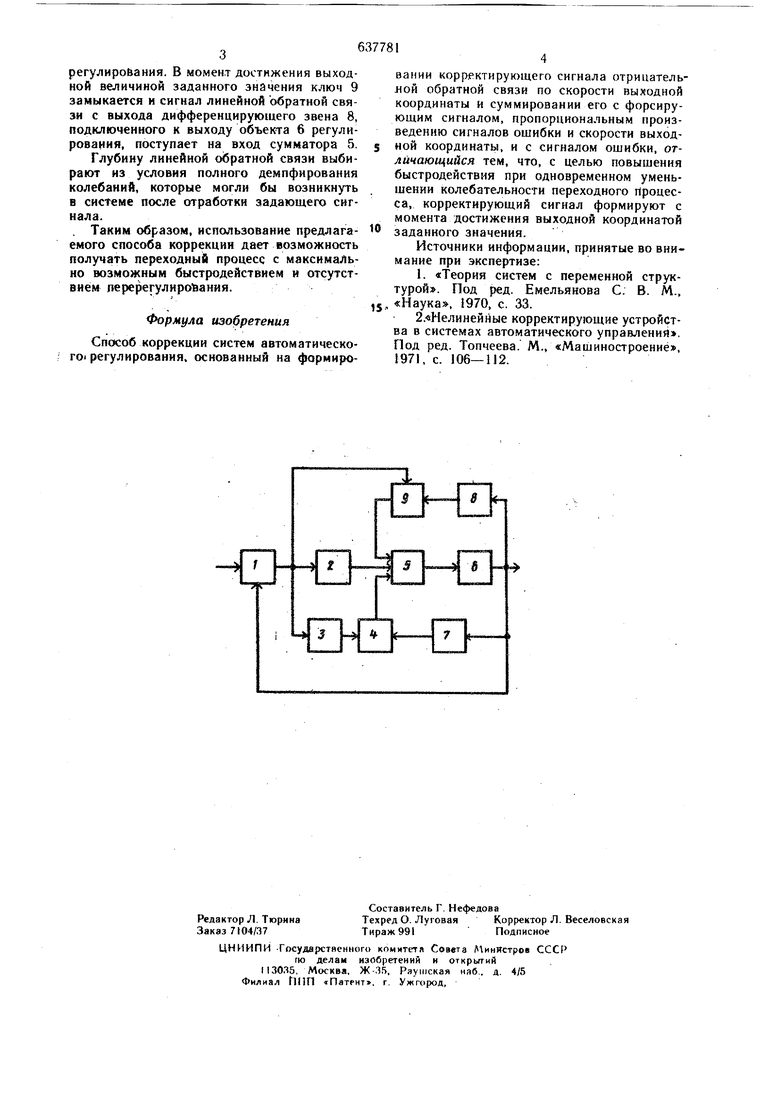
регулироЬания. В момент достижения выходной величиной заданного значения ключ 9 замыкается и сигнал линейной обратной связи с выхода дифференцирующего звена 8, подключенного к выходу объекта 6 регулирования, поступает на вход сумматора 5. Глубину линейной обратной связи выбирают из условия полного демпфирования колебаний, которые могли бы возникнуть в системе после отработки задающего сигнала. Таким образом, использование предлагаемого способа коррекции дает возможность получать переходный процесс с максимально возможным быстродействием и отсутствием перерегулирования. Формула изобретения Способ коррекции систем автоматического регулирования, основанный на формировании корр1ектирук)1цего сигнала отрицательной обратной связи по скорости выходной координаты и суммировании его с форсирующим сигналом, пропорциональным произведению сигналов ошибки и скорости выходной координаты, и с сигналом ошибки, отличающийся тем, что, с целью повышения быстродействия при одновременном уменьшении колебательности переходного Процесса, корректирующий сигнал формируют с момента достижения выходной координатой заданного значения. Источники информации, принятые во внимание при экспертизе: 1. «Теория систем с переменной структурой. Под ред. Емельянова С. В. М., «Наука, 1970, с. 33. 2.«Нелинейные корректирующие устройства в системах автоматического управления. Под ред. Топчеева. М., «Машиностроение, 1971, с. 106-112.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1992 |
|
RU2045090C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ПО ЗАДАННЫМ ПОКАЗАТЕЛЯМ КАЧЕСТВА (ВАРИАНТЫ) | 2003 |
|
RU2261466C2 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
