Изобретение относится к судостроению.
Известны дифферентные системы подводных аппаратов (ПА), обеспечивающие компенсацию дифферентных моментов, возникающих в процессе эксплуатации ПА, или создание дифферентов, необходимых для выполнения различных маневров или рабочих операций. Эти функции реализуются перемещением в нос или корму жидких или твердых грузов.
Недостатком устройств являются относительно узкие функциональные возможности, поскольку они позволяют скорректировать пространственную ориентацию ПА, но не позволяют осуществить изменение глубины его размещения.
Известно также устройство, содержащее узел регулировки пространственного положения, закрепленный на корпусе ПА, с помощью элементов крепления.
Недостатком этого устройства являются относительно узкие функциональные возможности, обусловленные тем, что оно обеспечивает изменение глубины погружения ПА, но не может быть использовано для изменения его пространственной ориентации.
Технический результат заключается в расширении функциональных возможностей устройства за счет обеспечения изменения как расстояния ПА от грунта, так и его пространственной ориентации.
Технический результат достигается тем, что устройство, содержащее узел регулировки пространственного положения, закрепленный на корпусе ПА с помощью элементов крепления, снабжено вторым узлом регулировки пространственного положения, закрепленным на корпусе ПА с помощью элементов крепления, гибким длинномерным элементом с высокой удельной плотностью и блоком управления, причем каждый из узлов регулировки пространственного положения включает в себя катушку, насаженную на вал, соединенный с валом электродвигателя и установленный в элементах крепления с возможностью вращения. При этом электродвигатель электрически связан с упомянутым блоком управления, а концы гибкого длинномерного элемента с высокой удельной плотностью закреплены на катушках.
На фиг.1 приведена функциональная схема устройства для управления пространственным положением ПА; на фиг.2 пример его использования для изменения глубины размещения ПА.
Устройство для управления пространственным положением содержит первый 1 и второй 2 идентичные узлы регулировки пространственного положения ПА 3, каждый из которых закреплен на корпусе ПА с помощью соответствующих им элементов 4 и 5 крепления в точках, разнесенных относительно центра тяжести ПА, гибкий длинномерный элемент 6 с высокой удельной плотностью, а также блок 7 управления, при этом каждый из узлов 1,2 регулировки пространственного положения включает в себя катушку 8, насаженную на вал 9, подвижно соединенный, например, с помощью подшипников с элементами крепления 6, 5 и неподвижно соединенный непосредственно или через редуктор (не показан) с валом электродвигателя 10, входы управления которого электрически соединены с блоком 7 управления, а концы гибкого длинномерного элемента 6 с высокой удельной плотностью, например металлическая лента, цепь или трос, закреплены на катушках 8.
Блок 7 управления предназначен для включения и управления направлением вращения электродвигателями 10. В простейшем случае при использовании электродвигателей постоянного тока он выполнен в виде двух переключателей полярности напряжения, либо в виде двух регуляторов полярности и величины напряжения, для регулировки как направления, так и скорости вращения электродвигателей.
Работает устройство для управления пространственным положением ПА следующим образом.
В исходном положении на обеих катушках 8 намотано одинаковое число витков элементов 6, например металлического троса. В это случае устройство (при симметричном расположении элементов крепления 4 и 5 относительно центра тяжести ПА) не оказывает влияния на пространственную ориентацию ПА 3. При включении одного из электродвигателей 10 в направлении, обеспечивающем намотку троса, а другого в направлении, обеспечивающем его размотку, вес троса на одной из катушек 8 увеличивается, а на другой уменьшается. Это приводит к наклону ПА 3 в направлении катушки с большим весом. Этим самым изменяют пространственную ориентацию ПА 3.
Если необходимо изменить глубину размещения ПА 3, то осуществляют одновременную размотку троса. В результате часть троса располагается на дне, что уменьшает вес ПА за счет уменьшения веса троса, намотанного на катушках. Это приводит к уменьшению глубины погружения ПА 3. При одновременном наматывании троса происходит увеличение глубины погружения ПА.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЙ РАЗЪЕМ | 1991 |
|
RU2030043C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| СПОСОБ ПОДВОДНОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2098628C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| АВИАДЕСАНТИРУЕМЫЙ СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2782037C1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| ЦЕНТРИФУГА ДЛЯ ОТЖИМА ТЕКСТИЛЬНЫХ ИЗДЕЛИЙ | 1995 |
|
RU2094552C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ И/ИЛИ РАЗМАТЫВАНИЯ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ НАМОТКИ ИЛИ РАЗМАТЫВАНИЯ | 1992 |
|
RU2015764C1 |
| ПОДВОДНЫЙ АППАРАТ | 2009 |
|
RU2391247C1 |
Использование: судостроение. Сущность изобретения: устройство содержит первый 1 и второй 2 идентичные узлы регулировки пространственного положения подводного аппарата (ПА) 3. Каждый из них закреплен на корпусе ПА 3 с помощью соответствующих им элементов 4 и 5 крепления в точках, разнесенных относительно центра тяжести ПА 3. Кроме того, устройство содержит гибкий длинномерный элемент 6 с высокой удельной плотностью, а также блок управления 7. Каждый из узлов регулировки пространственного положения включает в себя катушку 8, насаженную на вал 9, подвижно соединенный, например, с помощью подшипников с элементами крепления 4 и 5 и неподвижно соединенный непосредственно или через редуктор с валом электродвигателя 10, входы управления которого электрически соединены с блоком управления 7. Концы гибкого длинномерного элемента 6 с высокой удельной плотностью, например металлическая лента, цепь или трос, закреплены на катушках 8. 2 ил.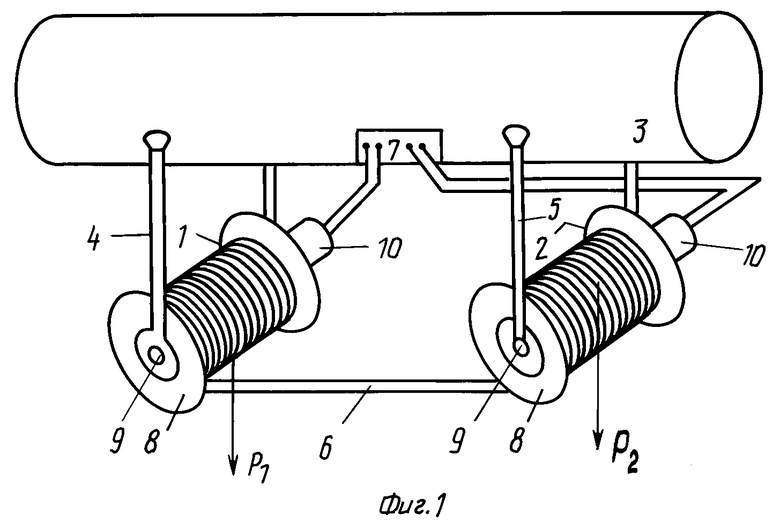
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ ПОДВОДНОГО АППАРАТА, содержащее узел регулировки пространственного положения, закрепленный на корпусе подводного аппарата с помощью элементов крепления, отличающееся тем, что оно снабжено вторым узлом регулировки пространственного положения, закрепленным на корпусе подводного аппарата с помощью элементов крепления, гибким длинномерным элементом с высокой удельной плотностью и блоком управления, причем каждый из узлов регулировки пространственного положения включает в себя катушку, насаженную на вал, соединенный с валом электродвигателя и установленный в элементах крепления с возможностью вращения, при этом электродвигатель электрически связан с блоком управления, а концы гибкого длиномерного элемента с высокой удельной плотностью закреплены на катушках.
| Диомидов М.Н., Дмитриев А.Н | |||
| Подводные аппараты | |||
| Л.: Судостроение, 1966, с.312. |
