Изобретение относится к техническим средствам судовождения и служит для применения в морской практике.
Цель изобретения повышение эксплуатационных и метрологических параметров магнитного компаса путем передачи информации в цифровой форме на любое число репитеров, удобство сопряжения магнитного компаса с системой автоматической прокладки курса, устранение остаточной магнитной девиации и магнитного склонения программным способом.
К данному техническому решению по составу признаков наиболее близко устройство магнитного компаса, содержащее датчик, преобразователь и вычислительный блок.
Предлагаемое устройство отличается тем, что в него введен буферный регистр, связанный с выходом интерфейса, а преобразователь сигналов выполнен в виде управляемого кварцевого генератора, вход которого является входом преобразователя сигналов, опорного кварцевого генератора, смесителя, входами подключенного к выходам управляемого и опорного кварцевых генераторов, и формирователя импульсов, вход которого соединен с выходом смесителя, а выход является выходом преобразователя сигналов.
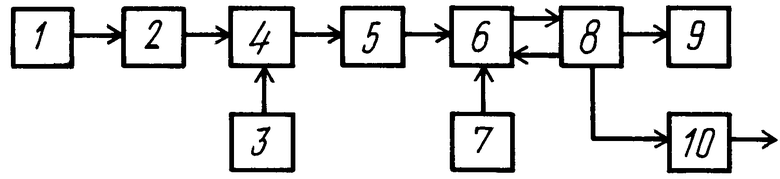
На чертеже показана схема устройства, которая содержит датчик 1, управляемый кварцевый генератор 2, опорный кварцевый генератор 3, смеситель 4; формирователь импульсов 5; вычислительный блок 6, программатор 7. интерфейс ввода-вывода информации 8; индикатор 9; буферный регистр 10.
Магнитный компас работает следующим образом.
Емкость датчика 1 зависит от угла поворота катушки магнитного компаса. Разностная частота, получаемая в смесителе 4 путем смешения частот управляемого 2 и опорного 3 кварцевых генераторов, в формирователе импульсов 5 превращается в последовательность импульсов, период следования которых содержит информацию о магнитном курсовом угле судна. Эта информация обрабатывается в вычислительном блоке 6. Значения магнитной девиации задаются с помощью программатора 7. Значения магнитного склонения вводятся в программатор 7 оператором через клавиатуру интерфейса ввода-вывода информации 8. Вычисленное значение истинного магнитного курса судна через интерфейс отображается на индикаторе 9 и через буферный регистр 10 выдается на вход системы автоматической прокладки курса.
Таким образом производится определение истинного магнитного курса судна с учетом остаточной девиации и магнитного склонения, которое определяется в зависимости от географического местоположения судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ МАГНИТНАЯ КОМПАСНАЯ СИСТЕМА С КОРРЕКЦИЕЙ | 2020 |
|
RU2769922C2 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ СИНХРОННЫХ ГЕНЕРАТОРОВ | 1998 |
|
RU2193269C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДУГОВОГО ВЫСОКОСКОРОСТНОГО ПРОВОЛОЧНОГО НАПЫЛЕНИЯ | 1995 |
|
RU2094523C1 |
| АРИФМЕТИЧЕСКОЕ УСТРОЙСТВО | 2004 |
|
RU2268482C1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| Способ измерения магнитного склонения и устройство для его осуществления | 1986 |
|
SU1343372A1 |
| РУЧНОЙ СОЛНЕЧНЫЙ КОМПАС ГОЛУБЕВА Г.А. | 1991 |
|
RU2105266C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ СИЛОВАЯ УСТАНОВКА СУДНА | 1992 |
|
RU2038264C1 |
Изобретение относится к техническим средствам судовождения и служит для применения в морской практике. Цель повышение эксплуатационных и метрологических параметров магнитного компаса путем передачи информации в цифровой форме на любое число репитеров, удобство сопряжения магнитного компаса с системой автоматической прокладки курса, устранение остаточной девиации и магнитного склонения программным способом. Достигается тем, что используется датчик на основе высокостабильного кварцевого генератора и цифровое представление информации, которое позволяет обрабатывать данные в микроЭВМ по заранее заданной программе. 1 ил.
ДИСТАНЦИОННЫЙ МАГНИТНЫЙ КОМПАС, содержащий последовательно соединенные датчик, преобразователь сигналов и вычислительный блок, связанный через интерфейс с индикатором и программатором, отличающийся тем, что в него введен буферный регистр, связанный с выходом интерфейса, а преобразователь сигналов выполнен в виде управляемого кварцевого генератора, вход которого является входом преобразователя сигналов, опорного кварцевого генератора, смесителя, входами подключенного к выходам управляемого и опорного кварцевых генераторов, и формирователя импульсов, вход которого соединен с выходом смесителя, а выход является выходом преобразователя сигналов.
| УСТРОЙСТВО ДЛЯ АНКЕРОВКИ ПУЧКОВ ПРЯДЕВОЙ АРМАТУРЫ | 1999 |
|
RU2143040C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
