Изобретение относится к устройствам для управления тормозами транспортных средств.
Цель изобретения повышение эффективности торможения путем синхронизации действия тормозов.
На фиг.1 схематично изображена тормозная система с многоконтурным приводом; на фиг.2 другое исполнение тормозной системы с многоконтурным приводом.
Тормозная система с многоконтурным приводом (фиг.1) содержит контур I тормозного привода, управляемый сигналом давления, и электрически управляемый контур II тормозного привода.
Тормозная система с многоконтурным приводом содержит задатчик 1 интенсивности торможения, который формирует электрической частью 2 электрический первый сигнал тормозной величины, а клапанной частью 3 сигнал давления, интенсивности которых зависят от усилия, прикладываемого к органу управления задатчика 1, и/или от величины перемещения органа управления.
Электрическая часть 2 и клапанная часть 3 благодаря расположению внутренних элементов соединены так, что первый сигнал тормозной величины при исправном управляемом давлении контура I тормозного привода образуется давлением на выходе клапанной части 3, а при неисправном управляемом давлением контуре I тормозного привода происходит непосредственное образование этого сигнала частью 2.
Контур I тормозного привода, управляемый сигналом давления, состоит из резервуара 4 рабочей среды, клапанной части 3, задатчика 1 и тормозов 5 и 6, приводимых в действие рабочей средой. Задатчик 1 подает сигнал давления так, что пропускает давление из резервуара 4 рабочей среды к тормозам 5 и 6 до тех пор, пока на выходе части 3 не установится давление, соответствующее усилию, прикладываемому к органу управления, и/или величине перемещения органа управления. Это давление в данном примере исполнения подводится непосредственно к тормозам 5 и 6 как тормозное давление. Однако оно может быть также использовано (фиг.2) для управления тормозным давлением с помощью релейного клапана 7. Также возможно расположение других обычных устройств (например, регулятора тормозных сил, клапана аварийного растормаживания и т. д.) в контуре I тормозного привода.
Электрически управляемый контур II тормозного привода состоит из резервуара 8 рабочей среды, тормозов 9 и 10, приводимых в действие рабочей средой, электрической части 2 задатчика 1, электрического устройства управления тормозной величиной, сенсора 11 тормозной величины, расположенного в управляемом давлением контуре I тормозного привода, и компаратора 12.
Сенсор 11 тормозной величины выполнен так, что он измеряет тормозную величину тормозов 5 и 6 и преобразует ее в электрический второй сигнал тормозной величины, т.е. действует как его генератор.
Компаратор 12 со стороны входа соединен с электрической частью 2 задатчика 1, а также с сенсором 11 тормозной величины, а со стороны выхода соединен с входом устройства управления тормозной величиной, таким образом является включенным перед этим устройством.
Устройство управления тормозной величиной состоит из электронного блока 13 управления, который со стороны входа соединен с выходом компаратора 12, электрически управляемых модуляторов 14 и 15 давления и сенсоров 16 и 17 тормозной величины. Модуляторы 14 и 15 давления электрически связаны с выходами блока 13 и контролируют соединение одного из тормозов 9 и 10 с резервуаром 8 рабочей среды. Сенсоры 16 и 17 тормозной величины измеряют тормозную величину, возникающую при приложении давления к соответствующему тормозу, и подают соответствующий электрический третий сигнал тормозной величины к блоку 13.
Компаратор 12 выполнен так, что он может проводить либо первый сигнал тормозной величины, либо второй сигнал тормозной величины к своему выходу, соединенному с входом блока 13.
При проведении в действие задатчика 1 тормозной величины он открывает с целью генерации сигнала давления в своей части 3 соединение между резервуаром 4 рабочей среды и тормозами 5 и 6. Из-за подвода давления в электрической части 2 возникает первый сигнал тормозной величины, а на тормозах 5 и 6 тормозная величина, которую измеряет сенсор 11 и преобразует во второй сигнал тормозной величины. Этот второй сигнал тормозной величины, так же как и первый сигнал тормозной величины, подается в компаратор 12, который в нормальном режиме работы проводит второй сигнал тормозной величины в качестве управляющего сигнала к блоку 13.
Блок 13 при получении этого управляющего сигнала подает к модулятором 14 и 15 давления зависящий от него сигнал или для каждого модулятора 14 и соответственно 15 давления собственный зависящий от него сигнал; затем модуляторы 14 и 15 давления пропускают до исчезновения этого сигнала давление из резервуара 8 рабочей среды в качестве тормозного давления к тормозам 9 и 10, на которых затем также возникает тормозная величина. Исчезновение сигнала наступает тогда, когда блок 13 устанавливает равенство между третьим сигналом тормозной величины и управляющим сигналом, подведенным к блоку 13 от компаратора 12.
Таким образом, устройство управления тормозной величиной образует контур регулирования для тормозных величин тормозов 9 и 10.
В качестве тормозной величины учитывается любая соответствующая величина, характеризующая мгновенную нагрузку тормозов 5 и 6 и соответственно 9 и 10. Предпочтительно в качестве тормозной величины используется тормозной момент (соответственно тормозная сила) или тормозная температура, которую соответствующие тормоза генерируют или поглощают вследствие подвода тормозного давления, а также само тормозное давление. Соответственно сенсоры 11, 16 и 17 тормозной величины выполнены как датчики тормозного момента (тормозной силы) или датчики температуры, или датчики давления.
В ненормальном режиме компаратор 12 проводит первый сигнал тормозной величины (выданный задатчиком 1), который затем вызывает вышеописанные действия в электрически управляемом контуре II тормозного привода.
Ненормальный режим, прежде всего, принимается во внимание при выходе из строя контура I тормозного привода, управляемого рабочей средой, электрически управляемый контур II тормозного привода остается в этом случае полностью работоспособным. С другой стороны также и контур II тормозного привода, управляемый давлением, остается полностью работоспособным при выходе из строя электрически управляемого контура I тормозного привода. Может только случиться, что вследствие допусков, в частности, тормозные величины в обоих контурах I и II тормозного привода будут сильнее отличаться друг от друга, чем это обычно имеет место в нормальном режиме работы.
Из описания работы явствует, что электрически управляемый контур II тормозного привода следует за контуром I тормозного привода, управляемым давлением. Вследствие этого контур II тормозного привода, являющийся потенциально более быстродействующим по причине своего электрического управления, замедляется, однако это происходит в пользу приведения в соответствие контура I тормозного привода с преимуществом, заключающимся в обеспечении синхронности давлений в контурах I и II тормозного привода.
Кроме описанного основного исполнения устройство может быть усовершенствовано различными способами, из которых некоторые представлены на фиг.1 штриховыми линиями.
Сенсоры 18 и 19 регистрируют определенные параметры транспортного средства и преобразуют их в электрическим сигналы, эти сенсоры электрически соединены с входами блока 13. Блок 13 в этом случае выполнен так, что он из управляющего сигнала, подведенного от компаратора 12 и сигналов сенсоров 18 и 19, образует скорректированный сигнал, соответственно скорректированные сигналы для модуляторов 14 и 15 давления, и отключает его, соответственно их, когда он устанавливает равенство между третьими сигналами тормозной величины (поступающими от сенсоров 16 и 17 тормозной величины) и этим, соответственно этими, скорректированными (и) сигналам (ами). Таким образом, в этом случае тормозные величины, возникающие на тормозах 9 и 10, зависят не только от управляющего сигнала, поступающего от компаратора 12, но и от параметров транспортного средства, зарегистрированных сенсорами 18 и 19. Таким образом, в этом примере исполнения электрически управляемый контур II тормозного привода лишь совместно управляется вторым сигналом тормозной величины (поступающим от сенсора 11 тормозной величины), соответственно первым сигналом тормозной величины (поступающим от задатчика 1), В этой связи в качестве параметра транспортного средства во внимание принимается любое свойство транспортного средства, относящееся к поведению транспортного средства при торможении. В качестве примера можно назвать состояние нагрузки транспортного средства и/или состояние нагрузки оси (ей), приданной (ых) электрически управляемому контуру II тормозного привода, скорость транспортного средства, усилие в сцепке между транспортным средством, используемым в качестве тягача, и прицепом и т.д.
Устройство 20 для распознавания усилия, прикладываемого к органу управления задатчика 1, и/или для распознавания величины его перемещения выполнено так, что подает сигнал потребности в тормозной величине, если оно устанавливает превышение заданного минимального значения усилия и/или величины перемещения. Сигнал потребности в тормозной величине подводится в компаратор 12, который в этом случае выполнен так, что при получении сигнала потребности в тормозной величине проводит первый сигнал тормозной величины (поступающий от задатчика 1) в качестве управляющего сигнала. Таким образом, в этом примере исполнения переход между нормальным режимом и ненормальным режимом определяется величиной усилия, прикладываемого к органу управления задатчика 1, и/или от величины его перемещения.
Устройство 21 для распознавания скорости приведения в действие датчика 1 может быть предусмотрено вместо устройства 20 или в дополнение к нему. Устройство 21 выполнено так, что подает сигнал скорости, когда оно устанавливает превышение заданной минимальной скорости. Сигнал скорости подводится к компаратору 12, который в этом случае выполнен так, что при получении сигнала скорости проводит первый сигнал тормозной величины. В этом примере исполнения переход между нормальным режимом и ненормальным режимом определяется величиной скорости приведения в действие датчика тормозной величины.
Компаратор 12 может быть выполнен также и так, что он сравнивает первый сигнал тормозной величины и второй сигнал тормозной величины друг с другом и при установлении недопустимого отклонения подает предупредительный сигнал. Такое недопустимое отклонение может основываться на ошибках в характеристиках или функциональных помехах сенсора 11 тормозной величины и/или электрической части 2 задатчика 1, но также и на выходе из строя контура I, управляемого давлением, причем в этом случае не возникает никакой тормозной величины или возникает лишь незначительная тормозная величина.
Если компаратор 12 выполнен сравнивающим первый сигнал тормозной величины и второй сигнал тормозной величины, то он вместо вышеописанного исполнения или в дополнение к нему может быть выполнен так, что он при установлении заданного допустимого отклонения проводит первый сигнал тормозной величины, т. е. переключает на ненормальный режим. Благодаря этому при выходе из строя контура I, управляемого давлением, электрически управляемый контур II остается полностью работоспособным.
При помощи настроечного устройства 22 для первого сигнала тормозной величины первый сигнал тормозной величины может быть полностью или по меньшей мере приближенно приравнен ко второму сигналу тормозной величины, когда компаратор 12 устанавливает отклонение между сигналами тормозной величины. Компаратор в этом случае выполнен так, что при нормальном режиме работы при установлении отклонения между сигналами тормозной величины подает управляющий сигнал к настроечному устройству 22, с помощью которого оно известным и поэтому неописанным более подробно образом целесообразно приводится в действием. Так как это происходит только в нормальном режиме, с помощью настроечного устройства 22 могут быть по существу или полностью устранены, или скомпенсированы ошибки в характеристиках, соответственно функциональные помехи сенсора 11 тормозной величины или электрической части 2 задатчика 1, влияния которых являются меньшими, чем уже указанное допустимое отклонение.
Описанный пример исполнения более подробно непосредственным образом может быть усовершенствован в том отношении, что компаратор 12 только тогда подает настроечный сигнал, когда установленное отклонение между сигналами тормозной величины достигло по меньшей мере заданного значения допуска. Благодаря этому предотвращаются приведение в действие настроечного устройства 22 при любом незначительном отклонении, а также повышенные затраты на настроечное устройство 22 и соответственно компаратор 12.
В примерах исполнения с настроечным устройством 22 и устройством 21 для распознавания скорости приведения в действие задатчика 1 устройство 21 может быть выполнено так, что оно выдает сигнал включения до тех пор, пока скорость приведения в действие не превысит заданное максимальное значение. Сигнал включения подводится в компаратор 12, который в этом случае выполнен так, что он подает настроечный сигнал (к настроечному устройству 22) только тогда, когда он одновременно устанавливает отклонение сигналов тормозной величины при известных условиях между заданным значением допуска и допустимым отклонение и принимает сигнал включения. При соответствующем установлении максимального значения (скорости приведения в действие задатчика 1) этот вариант исполнения обеспечивает то, что настроечное устройство 22 приводится в действие лишь при малых скоростях приведения в действие задатчика 1, при которых возможно синхронное изменение заданной величины давления и тормозной величины.
Чтобы уменьшить задержки в ходе изменения тормозной величины электрически управляемого контура 11 тормозного привода по отношению к контуру I тормозного привода, управляемому давлением, в случае описанного следящего регулирования, целесообразно при приведении в действие тормоза уже на основе воздействия сигнала тормозной величины немедленно отрегулировать тормозное давление приблизительно до величины давления срабатывания (соответственно прикладываемого давления) тормозов 9 и 10 электрически управляемого контура II тормозного привода и лишь затем осуществлять как это было описано выше следящее регулирование.
В примере осуществления изобретения согласно фиг.2 в качестве тормозной величины служит тормозное давление, подводимое к тормозам 5 и 6 соответственно. В соответствии с этим сенсоры тормозной величины выполнены как датчики 23-25 давления. Датчики 23-25 электрически управляемого контура II тормозного привода начерчены как отдельные узлы, однако они также могут быть встроены в соответственно приданный модулятор 14 или 15 давления.
Датчики 24 и 25 давления помимо соединения с блоком 13 соединены также с компаратором 12.
Сенсор 18 регистрирует состояние загрузки транспортного средства и/или состояние загрузки оси или нескольких осей, приданной(ых) электрически управляемому контуру II тормозного привода. Сигнал сенсора 18, обозначаемый ниже как сигнал нагрузки, помимо блока 13 подводится также и в компаратор 12.
В компараторе 12 запомнено характеристическое поле, которое придает каждому сигналу нагрузки заданное отклонение между вторым сигналом тормозной величины и третьим сигналом тормозной величины. Заданное отклонение может варьироваться с интенсивностью сигнала тормозной величины или сигналом тормозной величины. Кроме того, компаратор 12 выполнен так, что он выдает предупредительный сигнал, когда он устанавливает, что имеющееся действительное отклонение превышает или не достигает по меньшей мере на допустимое значение допуска заданное отклонение, приданное как раз имеющемуся сигналу нагрузки и при известных условиях интенсивности сигнала тормозной величины или сигналов тормозной величины. Вместе с допустимым значением допуска по тем же причинам, которые были указаны выше в отношении настроечного сигнала, предусмотрен порог срабатывания для подачи предупредительного сигнала. В крайнем случае это допустимое значение допуска может быть установлено на нуль и тем самым может быть вызвана немедленная подача предупредительного сигнала при любом превышении или недостижении заданного отклонения.
На основе своего принципа действия пример осуществления изобретения согласно фиг. 2 реализует способ управления по меньшей мере одним электрически управляемым контуром тормозного привода, в случае которого измеряется тормозная величина электрически управляемого контура торзмозного привода и преобразуется в электрический третий сигнал тормозной величины и в случае которого при превышении или недостижении зависящего от нагрузки заданного отклонения между вторым сигналом тормозной величины и третьим сигналом тормозной величины по меньшей мере на допустимое значение допуска подается предупредительный сигнал.
Этот пример осуществления изобретения тем самым делает возможной проверку датчика 23 контура I тормозного привода, управляемого давлением, с помощью датчиков 24 и 25 электрически управляемого контура тормозного привода и тем самым создается недорогостоящая возможность приведения описанной тормозной системы с многоконтурным приводом в соответствие повышенным требованиям безопасности.
Пример осуществления изобретения согласно фиг.2 также показывает, что в контуре I тормозного привода, управляемом давлением, управление тормозным давлением тормозов 5 и 6 происходит с помощью релейного клапана 7, к которому в качестве управляющего давления подводится сигнал давления, подаваемый задатчиком 1.
В остальном пример осуществления изобретения согласно фиг.2 соответствует примеру осуществления изобретения согласно фиг.1.
Благодаря тому, что в примерах осуществления изобретения каждому из тормозов 9 и 10 придан собственный модулятор 14, соответственно 15 давления, и собственный сенсор 16, соответственно 17, или датчик 24, соответственно 25, можно индивидуально регулировать тормозную величину каждого тормоза 9, соответственно 10, если блок 15 для каждого модулятора 14, соответственно 15 давления, подает собственный сигнал. Однако при отказе от тормозного комфорта тормозам 9 и 10 непредставленным образом могут быть приданы только один модулятор давления и только один сенсор тормозной величины с соответствующим упрощением от блока 13, вследствие чего получается решение, требующее меньших затрат.

Использование: изобретение предназначено для транспортных средств, имеющих электропневматический или электрогидравлический тормозной привод. Сущность изобретения: задатчик 1 интенсивности торможения осуществляет подачу рабочей среды под давлением из резервуара 4 к тормозам 5 и 6. Сенсор 11 измеряет тормозную величину, характеризующую мгновенную нагрузку тормоза 6, и передает сигнал на компаратор 12. Компаратор 12 подает управляющий сигнал на блок 13 управления, который с помощью модуляторов 14 и 15 регулирует давление в тормозах 9 и 10. К другим входам компаратора могут быть подключены электрическая часть 2 задатчика 1 и сенсоры 20 и 21 перемещения или усилия на органе управления. 4 з. п. ф-лы, 2 ил.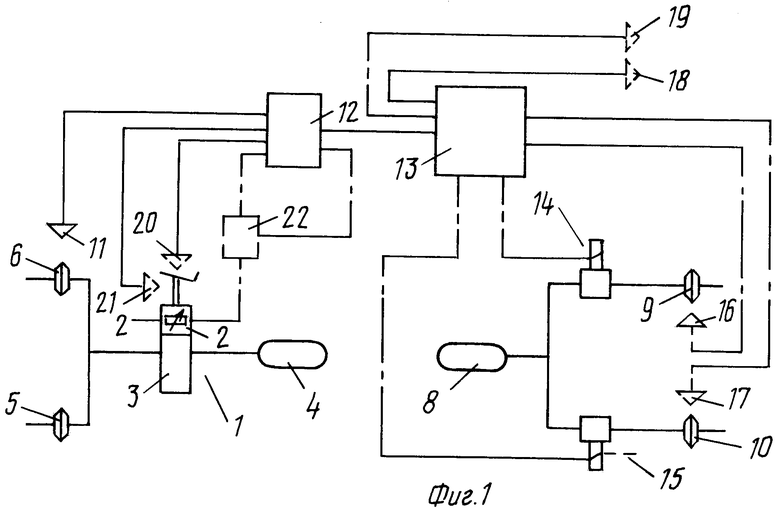
| НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU187901A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
