Предлагаемое изобретение относится к оборудованию для укладки штучных предметов, используемому преимущественно в линиях приведения консервов в товарное состояние на операциях укладки консервных банок в тару, и является усовершенствованием известного устройства, описанного в авт. свид. СССР N 1138346 [1].
Известное устройство для укладки предметов в тару [1] содержит установленный на горизонтальном валу ротор, дополнительные валы с кривошипами, закрепленные на роторе параллельно его валу и снабженные приводом периодического вращения, оси с закрепленными на них кулисами, смонтированные на роторе параллельно дополнительным валам, радиальные захваты, кинематически связанные с валом ротора при помощи дополнительных валов и осей, при этом захваты установлены на последних с возможностью качания. У прототипа каждый захват кинематически соединен с соответствующим ему дополнительным валом при помощи кривошипно-кулисного механизма, кулиса которого жестко соединена с осью [1].
Основным недостатком прототипа является наличие контакта между стенкой ящика, в который укладываются банки, и захватом при выходе последнего из ящика. Причина такого явления связана с медленным нарастанием скорости захвата при выходе его из ящика.
При медленном откидывании захвата посредством механизма с качающейся кулисой взаимодействие захвата со стенкой ящика имеет место, поскольку кроме указанного движения каждый захват совершает вместе с ротором непрерывное поворотное движение, замедляющее выход захвата из ящика, занимающего фиксированное положение.
Повторение взаимодействия захватов с ящиком при многослойной укладке банок приводит к остаточным деформациям, искажающим форму сечения ящика и ухудшающим качество укладки. Результатом такой деформации являются простои в работе, связанные с заменой деформированной тары, т.е. внецикловые потери рабочего времени, снижающие производительность устройства.
Кроме того, при работе прототипа каждая кулиса (захват) совершает возвратно-поворотное движение с ограниченным углом размаха, которое сопровождается мягкими ударами. В интервале прямого и обратного хода каждого захвата мягкие удары (когда скорость равна нулю, а ускорение не равно нулю) имеют место в четырех граничных точках, т.е. в моменты начала и конца прямого хода, начала и конца обратного хода. Мягкие удары снижают надежность кинематических связей устройства, приводят к необходимости уменьшения угловой скорости ротора, что снижает производительность устройства.
Задачей настоящего изобретения является повышение качества укладки и увеличение производительности.
Решение доставленной задачи достигается тем, что в устройстве для укладки предметов в тару, содержащем установленный на горизонтальном валу ротор, дополнительные валы с кривошипами, закрепленные на роторе параллельно его валу и снабженные приводом периодического вращения, оси с закрепленными на них кулисами, смонтированные на роторе параллельно дополнительным валам, радиальные захваты, кинематически связанные с валом ротора при помощи дополнительных валов и осей, захваты установлены на осях с возможностью вращательного движения.
Длина кривошипа каждого дополнительного вала удовлетворяет неравенству r > L, где r - геометрическая длина кривошипа, L - расстояние между соответствующим дополнительным валом и осью с соответствующей кулисой.
В отличие от прототипа в предлагаемом устройстве захваты совершают вращательное движение, т.е. совершают относительно своих осей поворот на 360o. При этом используется кривошипно-кулисный механизм с вращающимся выходным звеном, обеспечивающий бесконтактный выход захвата из ящика.
Преимущества такого механизма в сравнении с применяемым в прототипе кривошипно-кулисным механизмом с качающейся кулисой видны при сравнении первых передаточных функций, определяющих при равной частоте вращения кривошипов угловые скорости захватов прототипа и предлагаемого устройства.
Угловая скорость захватов при выходе последних из ящика как у прототипа, так и у предлагаемого устройства определяется выражением
ωз= ω•П′, (1)
где ωз - угловая скорость захвата;
ω - частота вращения дополнительного вала (кривошипа);
П' - первая передаточная функция (аналог скорости).
Для прототипа характерно, что безразмерный параметр
λ = (r/L) < 1,
где r - длина кривошипа;
L - расстояние между центрами вращения кривошипа и качания кулисы (межцентровое расстояние).
Пусть для механизмов прототипа имеем L = 2r, тогда λ1 = 0,5. Здесь λ1 - безразмерный параметр механизмов прототипа.
Для механизмов предлагаемого устройства характерно
λ = (r/L) > 1,
где r - длина кривошипа;
L - расстояние между дополнительным валом, на котором закреплен кривошип, и осью, на которой закреплены кулиса и захват.
Для сопоставимости механизмов прототипа с механизмами предлагаемого устройства примем r = 2L, тогда λ2 = 2. Здесь λ2 - безразмерный параметр механизмов предлагаемого устройства. Максимальное значение первой передаточной функции для прототипа, т.е. для механизма с качающейся кулисой, определяется по выражению
Следовательно, для нашего примера  = 0,5/(1 - 0,5) = 1, где
= 0,5/(1 - 0,5) = 1, где  - максимальное значение первой передаточной функции для механизмов прототипа.
- максимальное значение первой передаточной функции для механизмов прототипа.
Максимальное значение первой передаточной функции для предлагаемого устройства, т. е. для механизма с вращающейся кулисой, определяется по выражению
Следовательно, для нашего примера  = 2/(2 - 1) = 2, где
= 2/(2 - 1) = 2, где  - максимальное значение первой передаточной функции для механизмов предлагаемого устройства.
- максимальное значение первой передаточной функции для механизмов предлагаемого устройства.
Из формулы (1) следует, что при равенстве угловых скоростей кривошипов в механизмах прототипа и предлагаемого устройства максимальная скорость захватов последнего будет в два раза больше. Это означает, что при одинаковой частоте вращения роторов прототипа и предлагаемого устройства и равенстве угловых скоростей их дополнительных валов с кривошипами условия для бесконтактного выхода захвата их ящика в предлагаемом устройстве являются более предпочтительными.
Другими словами, компоновка предлагаемого устройства, при которой длина каждого кривошипа больше, чем межцентровое расстояние между соответствующим дополнительным валом и осью с соответствующей кулисой, позволяет исключить при многослойной укладке банок деформацию ящика и таким путем повысить качество укладки.
При работе предлагаемого устройства каждая кулиса (захват) совершает вращательное движение, при этом кривошип и кулиса вращаются относительно своих центров в одном направлении, т.е. скорость кулисы в интервале ее полного оборота не меняет своего знака. В отличие от прототипа здесь мягкий удар имеет место лишь дважды - в моменты начала и конца движения захвата [2] .
Из разъяснения указанных признаков следует, что предлагаемое устройство в сравнении с прототипом имеет преимущества, реализация которых позволит повысить качество укладки банок и обеспечит возможность для увеличения производительности.
Предлагаемое устройство для укладки предметов в тару поясняется чертежами, где на
- фиг.1 изображено устройство, вид спереди;
- фиг.2 - то же, вид сверху;
- фиг.3 - то же, вид слева;
- фиг.4 - то же, вид справа;
- фиг.5 - то же, вид сзади;
- фиг.6 - механизм захвата;
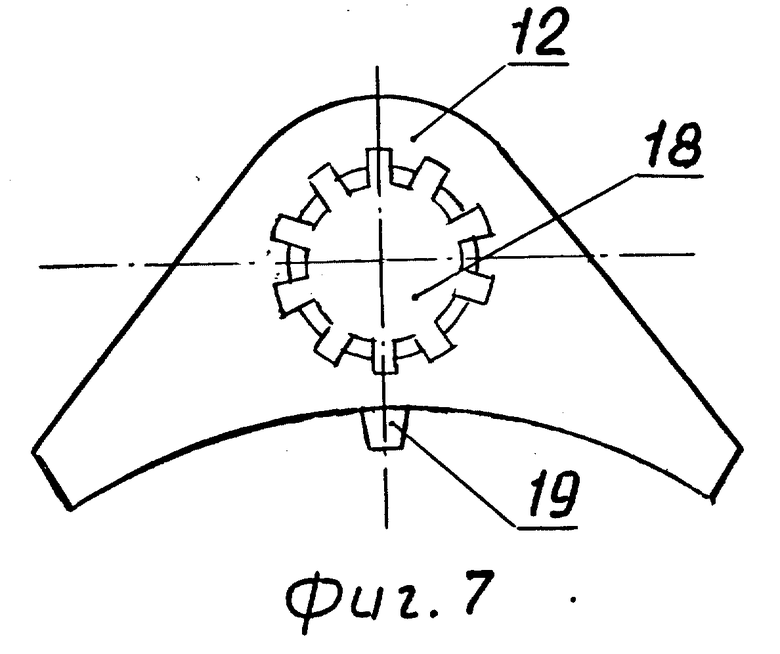
- фиг.7 - фиксатор;
- фиг.8 - развертка рабочей поверхности тормозного диска.
Устройство содержит ротор 1, укрепленный на горизонтальном валу 2, с радиальными захватами 3, питатель 4 предметов, опору 5 для тары и привод 6.
Каждый захват 3 укреплен на оси 7, на одном конце которой укреплена кулиса 6, кинематически связанная с кривошипом 9 посредством ползуна 10, при этом кривошип 9 укреплен на конце дополнительного вала 11, который шарнирно соединен с подшипниковой опорой, расположенной внутри ротора, на другом конце вала 11 смонтированы фиксатор 12 для взаимодействия с тормозным диском 13 и шестерня 14 для взаимодействия с зубчатым сектором 15, причем тормозной диск 13 закреплен на опоре 16 вала 2 ротора 1, а зубчатый сектор 15 смонтирован на диске.
Захват 3 выполнен вилкообразным и закреплен на V-образном стержне 17, жестко связанном с осью 7. Пальцы захвата 3 расположены относительно несущего плеча стержня 17 под прямым углом, расположение стержня 17 в пространстве таково, что пальцы в рабочем положении захвата направлены нормально поверхности ротора 1. Ось 7 установлена в двух опорных подшипниках, расположенных внутри ротора 1 (фиг.6).
Кривошип 9, ось 7 и оснащенная ползуном 10 кулиса 8 в рабочем положении захвата 3 лежат в одной плоскости, проходящей через геометрическую ось вала 2 ротора 1. Для обеспечения поворота захвата 3 на угол 360o кривошип 9 должен быть больше, чем расстояние от оси его вращения до оси 7 вращения кулисы 8.
Фиксатор 12 выполнен в виде тормозной колодки с отверстием 18 для посадки на вал 11, причем колодка имеет фасонный вырез (фиг.7), радиус кривизны которого равен радиусу тормозного диска 13, а в теле колодки по периметру отверстия 18 имеются сквозные пазы для шлицевых зубьев вала 11. На фиксаторе 12 со стороны его фасонного выреза смонтирован приводной ролик 19 для взаимодействия с пазом 20 диска 13 (фиг.6).
Рабочая поверхность тормозного диска 13 имеет форму круглого цилиндра, паз 20 для роликов 19 выполнен в теле диска по его рабочей поверхности, профиль паза выполнен криволинейным (фиг.8), при этом участок а-б паза соответствует интервалу поворота кривошипа 9, кулисы 8 и захвата 3 на угол, равный 360o, а участок б-а - интервалу движения захвата в рабочем положении. Участок а-б паза 20 совмещен с зубчатым сектором 15, при этом зубчатый сектор 15 крепится к тормозному диску 13 со стороны, противоположной ротору 1.
Тормозной диск 13 имеет центральное отверстие 21, служащее для свободного прохода вала 2 ротора 1, и сквозные вырезы в виде дуг для крепления диска к опоре 16 с возможностью поворота его относительно вала 2 ротора. Опора 16 имеет Г-образную форму, в горизонтальной части опоры имеется центральное сквозное отверстие, при этом торец горизонтальной части опоры служит местом крепления диска 13, а в центральном отверстии смонтирован подшипник для посадки вала 2 ротора.
Пальцы захватов 3 и стержни 17 выполнены трубчатыми из материала с малой массовой плотностью, при этом их полости сообщаются между собой. Пустотелые пальцы каждого захвата 3 снабжены вакуум-присосами 22, выполненными из эластичного материала, полости пальцев через пустотелый стержень 17, связанный с укрепленным на оси 7 золотниковым вводом, посредством герметичной трубки связаны с источником вакуума.
Подшипниковые опоры дополнительных валов 11 и осей 7, на которых укреплены кулисы 8 и захваты 3, смонтированы на радиально расположенных спицах, жестко связанных с валом 2 ротора 1, при этом опоры имеют в основании продольные вырезы для болтов и крепятся к спицам с возможностью перемещения их в радиальном направлении. Этим обеспечивается регулировка расстояния между осями валов ротора 1 и кривошипов 9, а также между осями кривошипа 9 и кулисы 8 каждого из кривошипно-кулисных механизмов при наладке устройства.
В цилиндрической стенке ротора 1 имеются сквозные вырезы 23, через которые проходят элементы захватов 3 при совершении последними вращательного движения. Фиксаторы 12 и шестерни 14 закрыты защитным кожухом 24 цилиндрической формы, который днищем крепится к опоре. 16.
Питатель 4 состоит из накопителя 25 (фиг.2), ворошителя 26 и формирователя 27 для банок. Накопитель 25 банок выполнен в виде прямоугольного стола с полированной плоской рабочей поверхностью, укрепленного с наклоном в сторону формирователя 27 для банок, при этом стол закреплен с возможностью регулирования его высоты при помощи винтовых пар.
Ворошитель 26 банок состоит из двух параллельных реек прямоугольного сечения, расположенных вдоль боковых кромок накопителя 25. Возвратно-поворотное движение реек ворошителя, воздействующих на банки, облегчает вход банок в ручьи формирователя.
Формирователь 27 ряда банок выполнен в виде вилки, основание которой состыковано с накопителем 25 и укреплено на его раме. Каждый палец формирователя состоит из двух перпендикулярно расположенных одна относительно другой направляющих, горизонтальной и вертикальной, при этом рабочие поверхности горизонтальных направляющих всех пальцев формирователя расположены в одной плоскости, нормальной поверхности ротора 1, а в теле горизонтальных направляющих имеются сквозные фигурные вырезы для прохода вакуум-присосов 22, смонтированных на пальцах захватов 3. Формирователь 27 закреплен с возможностью установки его в различных плоскостях, расположенных по нормали относительно поверхности ротора 1, для чего вилка выполнена поворотной относительно оси крепления ее на раме накопителя 25, а стыковка пальцев формирователя с накопителем банок выполнена подвижной в направлении от накопителя к ротору, и наоборот (т.е. в направлении пальцев).
Каждая пара соседних пальцев формирователя образует "ручей" для банок. На концах пальцев формирователя укреплены фигурные упоры для банок (по два на каждый "ручей"). Один из упоров в каждом "ручье" снабжен датчиком наличия банок, при этом все датчики соединены последовательно и сблокированы системой автоматического управления с приводом 6 ротора 1 для подвода захватов 3 к формирователю 27 только при наличии в "ручьях" формирователя полного комплекта банок.
Для исключения остановки ротора 1 в период после захвата банок вакуум-присосами и снятия их с формирователя до окончания формирования нового ряда банок предусмотрен конечный выключатель 28, вмонтированный в боковину паза 20 тормозного диска 13, нормально замкнутые контакты которого соединены параллельно с контактами датчиков наличия банок. Над входной частью формирователя 27 перпендикулярно его пальцам установлена подпружиненная планка 29, служащая для предотвращения опрокидывания банок, находящихся на накопителе, но контактирующих с крайними банками в "ручьях" формирователя, при подъеме комплекта банок вакуум-присосами.
Для обеспечения остановки ротора 1 при работающем электродвигателе привода 6 последний снабжен электромагнитной муфтой 30.
Устройство работает следующим образом. Предварительно включаются в работу ворошитель 26, транспортер подачи банок на накопитель 25 и в позицию загрузки подается пустой ящик. После образования полного комплекта банок на формирователе 27 включается в работу привод 6, обеспечивающий вращение ротора 1 с захватами 3. Пальцы захватов 3, проходя между пальцами формирователя 27, захватывают вакуум-присосами 22 банки, находящиеся в ручьях формирователя, и переносят их в позицию загрузки.
При вращении ротора 1 приводные ролики 19 фиксаторов 12, перемещаясь в пазу 20 тормозного диска 13, перемещают фиксаторы, на которых они смонтированы, вдоль осей дополнительных валов 11. В позиции загрузки зубья шлицев дополнительного вала 11 выходят из зацепления со шлицами фиксатора 12, в результате чего последний перестает запирать захват 3 в рабочем положении (точка (а, фиг. 8). По окончании выхода шлицев из зацепления шестерня 14 входит в зацепление с зубчатым сектором 15, в вакуум присосах 22 разрежение сменяется атмосферным давлением и банки устанавливаются на дно ящика или расположенный ниже ряд банок, уже находящихся в ящике.
Вал 11 продолжает поворачиваться вместе с ротором 1, при этом, поскольку шестерня 14 взаимодействует с зубчатым сектором 15, обеспечивается поворот на 360o укрепленного на валу 11 кривошипа 9, который сообщает жестко связанной системе кулиса 8 - захват 3 вращательное движение относительно оси 7 с ограниченным углом поворота, равным 360o. В результате этого захват 3 выходит из ящика, проходит мимо опоры 5, не контактируя с последней, и до подхода к формирователю 27 возвращается в рабочее положение. После поворота кривошипа 9 на 360o, что соответствует приходу захвата 3 в рабочее положение, шестерня 14 перестает взаимодействовать с зубчатым сектором 15, а шлицы фиксатора 12 входят в зацепление с зубьями шлицев вала 11, в результате чего захват 3 запирается в рабочем положении (точка б, фиг.8).
Рабочее положение захвата 3 соответствует положению кулисы 8, при котором последняя лежит на линии, проходящей через центры вращения кривошипа 9 и кулисы 8. При повороте кривошипа 9 ползун 10 перемещается вдоль кулисы 8, в результате чего последней сообщается вращательное движение.
При подходе захвата 3 к формирователю 27 ролик 19 фиксатора 12 нажимает на конечный выключатель 28 и размыкает его контакты, при этом, если формирователь 27 заполнен банками, ротор 1 продолжает вращение, если же ряд банок не сформирован, ротор 1 посредством электромагнитной муфты 30 останавливается при работающем электродвигателе привода 6, по окончании формирования комплекта банок на формирователе контакты датчиков наличия банок замыкаются, и ротор 1 автоматически включается в работу.
После загрузки ряда банок в ящик опора 5 опускает ящик на расстояние, равное высоте банки, а после наполнения ящика выводит его из устройства, сигнализируя о подаче под загрузку пустого ящика.
Введение кривошипно-кулисных механизмов с вращающимся выходным звеном в кинематическую связь захватов с валом ротора обеспечит увеличение скорости каждого захвата в начальный момент выхода последнего из ящика, позволит реализовать более благоприятный закон движения захватов, характеризующийся меньшим числом мягких ударов, которые будут иметь место лишь в начале и конце движения захватов.
В результате быстрого нарастания скорости захвата при выходе его из ящика в предлагаемом устройстве не происходит контакта (взаимодействия) захвата с ящиком, что исключает деформацию последнего и простои в работе устройства, связанные с заменой брака. Уменьшение числа мягких ударов при откидывании захватов повышает надежность кинематических связей предлагаемого устройства, чем обеспечивается возможность повышения производительности последнего за счет уменьшения внецикловых потерь рабочего времени.
Источники информации, принятые во внимание при составлении заявки
1. Авт. свид. СССР N 1138346, МКИ B 65 B 5/10, 1985.
2. Технологические процессы и оборудование рыбообрабатывающих предприятий. Труды КТИРПХ, Калининград, 1982, вып. 90. - С. 66-78.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1994 |
|
RU2091277C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1993 |
|
RU2091276C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2142392C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2138425C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1998 |
|
RU2151087C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2143384C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1993 |
|
RU2086481C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |






Изобретение относится к оборудованию для укладки консервных и пресервных банок в транспортную тару. Устройство содержит ротор, укрепленный на горизонтальном валу, с радиальными захватами, питатель предметов, опору для тары и привод. Каждый захват укреплен на оси, на одном конце которой закреплена кулиса. Последняя кинематически связана с кривошипом посредством ползуна. Кривошип укреплен на конце дополнительного вала. На другом конце вала смонтирован фиксатор для взаимодействия с тормозным диском и шестерня для взаимодействия с зубчатым сектором. Тормозной диск закреплен на опоре вала ротора. Зубчатый сектор смонтирован на диске. Длина кривошипа больше, чем расстояние между осью и дополнительным валом. Устройство позволяет повысить качество укладки и производительность. 1 з.п. ф-лы, 8 ил.
r > L,
где r - длина кривошипа;
L - расстояние между соответствующим дополнительным валом и осью соответствующей кулисы.
| Устройство для укладки предметов в тару | 1983 |
|
SU1138346A2 |
| Технологические процессы и оборудование рыбообрабатывающих предприятий | |||
| - Труды КТИРПХ, Калининград, 1982, вып.98, с.66-78 | |||
| Устройство для укладки изделий в тару | 1984 |
|
SU1165608A1 |
