Изобретение относится к станкостроению и может быть использовано в устройствах для подачи заготовок с одной операции на другую, а также для загрузки заготовок, например, на сборочную позицию, где загрузка заготовок должна производиться по прямолинейной траектории.
Цель изобретения - расширение функ- ционалных возможностей за счет обеспечения перемещения захватов с заготовками в зоне рабочих позиций по прямолинейным радиальным участкам траектории.
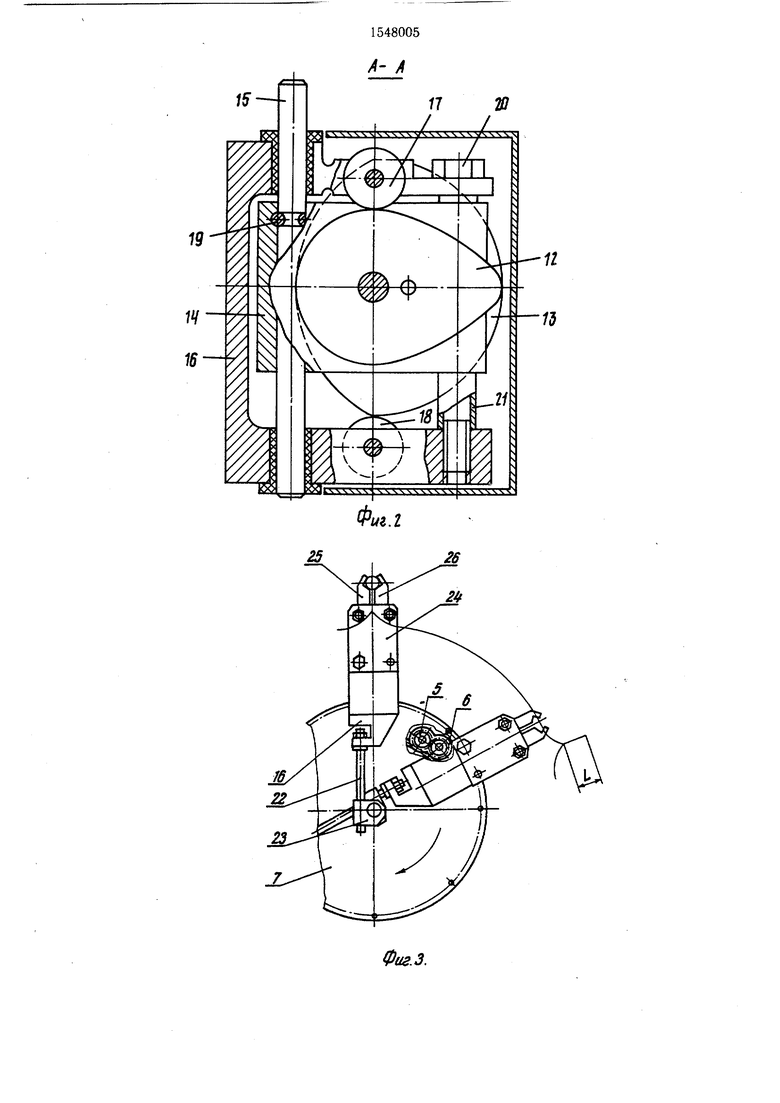
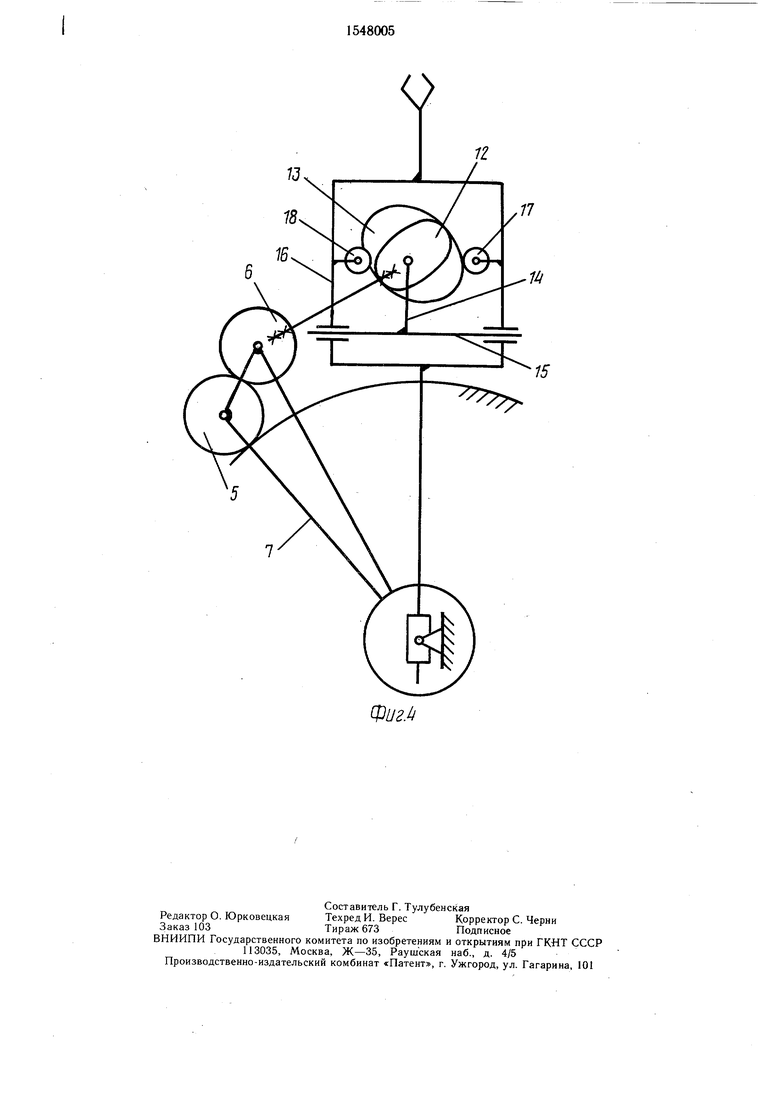
На фиг. 1 изображено устройство для подачи заготовок, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - устройство, вид сверху; на фиг. 4 - кинематическая схема устройства.
Устройство для подачи заготовок содержит механизм перемещения захватов, выполненный в виде планетарного механизма с приводом, включающим вал 1 с закрепленной на нем звездочкой 2, кривошипно-ша- тунного механизма и дополнительного механизма перемещения захватов. Планетарный механизм выполнен в виде закрепленной на корпусе 3 неподвижной шестерни 4, которая посредством паразитных шестерен 5 связана с сателлитами 6. Паразитные шестерни 5 и сателлиты 6 смонтированы в корпусе-води- ле 7, жестко закрепленном на валу 1. На осях 8 сателлитов жестко закреплены кривошипы 9, на каждом из которых при помощи пальца 10 и штифта 11 закреплен дополнительный механизм перемещения захватов, выполненный в виде кулачков 12 и 13, шар- нирно соединенных с промежуточным корпусом 14, снабженным направляющей штангой 15, и рамки 16, установленной с возможностью перемещения в горизонтальной плоскости по направляющей штанге 15 при помощи роликов 17 и 18, контактирующих с кулачками 12 и 13.
Направляющая штанга 15 удерживается в промежуточном корпусе 14 посредством штифта 19. Свободные концы подвижной рамки 16 стягиваются винтом 20 через дистан- цер 21 , Рамка 16 закреплена на шатуне 22, взаимодействующем с шарнирно установленной на валу 1 кулисой 23, и имеет на противоположном конце захват 24 с зажимами 25 и 26, предназначенными для удержания детали. На устройстве может быть установлено несколько захватов 24 с механизмами их привода, что повышает производительность устройства при транспортировании и загрузке заготовок.
Каждый из установленных на устройстве захватов 24 обеспечивает перемещение заготовок по одной и той же траектории с прямолинейными участками в зоне рабочих
позиций.
Устройство работает следующим образом.
Вал 1 приводится во вращение от двигателя (не показан) посредством звездочки 2. Вместе с валом 1 вращается корпус-води - ло 7. При этом вращении паразитные шестерни 5 обкатывают неподвижную шестерню 4 и передают крутящий момент сателлитам 6. Последние посредством осей 8, кривошипов 9, пальцев 10 и штифтоь 11 сообщают движение кулачкам 12 и 13., Диаметры зубчатых колес 4, 5 и 6 и длина кривошипа 9 подобраны так, что ось пальца 10 движется по замкнутой гипоциклоиде с числом точек возврата, соответствующим числу рап бочих позиций. При вращении кулачки 12 и 13 воздействуют на постоянно контактирующие с ними ролики 17 и 18 и рамка 16 совершает возвратно-поступательное движение относительно промежуточного корпуса 14 по направляющей штанге 15. Сложением двух
5 движений - по гипоциклоиде вместе с пальцем 10 и возвратно-поступательного, обеспечиваемого профилем кулачков 12 и 13, реализуется закон движения захвата 24 по траектории с прямолинейным радиальным участком длиной L (фиг. 3) вблизи рабочих по0 зиций. При этом, поскольку шатун 22 удерживается кулисой 23 в радиальном направлении, движение захвата на прямолинейном участке происходит без углового поворота.
35
Формула изобретения
Устройство для подачи заготовок, содержащее захваты и механизм перемещения захватов, выполненный в виде планетарного механизма с сателлитами и кривошипношатунных механизмов, кривошипы которых закреплены на осях сателлитов, а шатуны установлены в кулисах, отличающееся тем, что, с целью расширения функциональных возможностей, устройство снабжено дополнительными механизмами перемещения захватов, каждый из которых выполнен в виде закрепленной на шатуне рамки, установленной с возможностью перемещения в горизонтальной плоскости перпендикулярно оси шатуна по направляющим штангам посредством введенных кулачков, при этом захваты закреплены на рамке со стороны, противоположной шатуну.
tf
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и выгрузки деталей | 1982 |
|
SU1055566A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Автомат для штамповки деталей | 1991 |
|
SU1811947A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1968 |
|
SU213543A1 |
| УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ПРЕДМЕТОВ ОБРАБОТКИ | 1993 |
|
RU2049644C1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2237175C2 |
| ПЕРИСТАЛЬТИЧЕСКИЙ НАСОС | 1994 |
|
RU2067219C1 |
| Аппарат для получения вязких смесей | 1978 |
|
SU778763A1 |
| Устройство а.ф.слюсаренко для транспортировки заготовок | 1977 |
|
SU867485A1 |
Изобретение относится к станкостроению и может быть использовано в устройствах для подачи заготовок с одной операции на другую, а также для загрузки деталей на сборочную позицию. Цель изобретения - расширение функциональных возможностей за счет перемещения заготовок в зоне рабочих позиций по прямолинейным радиальным участкам траектории. Устройство содержит планетарный механизм с сателлитами 6, кривошипно-шатунные механизмы, кривошипы 9 которых закреплены на осях 8 сателлитов 6, а шатуны 22 жестко соединены с дополнительными механизмами перемещения, каждый из которых выполнен в виде рамки 16, взаимодействующих с ней кулачков 12 и 13, установленных при помощи пальца 10 и штифта 11 на кривошипе 9. При работе устройства происходит сложение двух движений - по гипоциклоиде вместе с пальцем 10 и возвратно-поступательного, обеспечиваемого профилем кулачков 12 и 13, при этом реализуется закон движения захвата 24 по прямолинейному участку в зоне рабочей позиции. 4 ил.
Фиг.З.
ФигМ
| Загрузочное устройство | 1979 |
|
SU776861A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
