Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин и устройств различного целевого назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987.-С. 9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с губками для захвата изделий, передаточный механизм и привод (Патент 2164860 (РФ), опубл. в Б.И. и П.М., 2001.- 10 - прототип).
Основным недостатком прототипа являются завышенные энергозатраты на процесс передачи изделий и неспособность прямолинейного перемещения последних из позиции "схвата" в позицию выдачи. Завышение энергозатрат связано с тем, что ведущие звенья (кулачки) исполнительного механизма не занимают фиксированного положения, а совершают движение вместе с выходными звеньями как при рабочем, так и при холостом ходах. Кроме того, прототип обеспечивает перемещение изделий по дугообразной траектории. Это не удовлетворяет условию передачи изделий по минимальному пути между позициями "схвата" и выдачи. Передача изделий по прямолинейной траектории во многих случаях оказывается предпочтительной и под углом зрения обеспечения технологических требований.
Задачей настоящего изобретения является снижение энергозатрат на процесс передачи изделий и расширение технологических возможностей устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущими и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привода, выходное звено передаточного механизма выполнено в виде ползуна, подвижно сопряженного с выходными звеньями исполнительного механизма.
Передаточный механизм выполнен в виде многозвенного механизма, построенного на базе механизма с качающейся кулисой, при этом многозвенный механизм удовлетворяет условию:
W=3•n-2p5-p4=3•5-2•7=1, (1)
где W - число степеней свободы выходного звена передаточного механизма, W=1;
n - число подвижных звеньев, n=5;
р5 - число низших кинематических пар, р5=7;
р4 - число высших кинематических пар, р4=0.
Комбинированный механизм удовлетворяет условию:
W=3•n-2p5-p4-3•6-2•8-1=1, (2)
где W - число степеней свободы каждого из выходных звеньев исполнительного механизма относительно выходного звена передаточного механизма, W=1;
n - число подвижных звеньев, n=6;
р5 - число низших кинематических пар, p5=8;
р4 - число высших кинематических пар, р4=1.
Губки для захвата изделий жестко соединены с выходными звеньями исполнительного механизма, при этом упомянутое соединение выполнено разъемным.
Ведущие звенья исполнительного механизма выполнены в виде неподвижного копира, снабженного фигурными пазами, а на свободных концах выходных звеньев смонтированы ролики для взаимодействия с упомянутыми пазами.
Передаточный механизм содержит дополнительное звено, выполненное в виде шатуна, для кинематической связи кулисы с выходным звеном.
Ведущее звено базового механизма выполнено в виде кривошипа, подвижно сопряженного с кулисой.
Угол качания кулисы базового механизма определен из выражения:
β = 2arsinλ, (3)
где β - угол качания кулисы: угол между крайними положениями кулисы;
λ - характерный параметр механизма: относительная длина кривошипа, λ = r/d;
r - длина кривошипа;
d - расстояние между центрами вращения кривошипа и качания кулисы.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, которые обеспечивают уменьшение энергозатрат на процесс передачи изделий и расширяют технологические возможности устройства. В отличие от прототипа в предлагаемом устройстве ведущие кулачки не совершают возвратно-поворотного движения вместе с выходным звеном передаточного механизма, они не совершают и вращательного движения. Кроме того, в предлагаемом устройстве в отличие от прототипа нет системы гибкой связи между передаточным и исполнительным механизмами. Этим определяются существенные преимущества предлагаемого устройства.
Выполнение выходного звена передаточного механизма в виде ползуна, подвижно сопряженного с выходными звеньями исполнительного механизма, обеспечивает условия для перемещения выходных звеньев с губками для захвата изделий по прямолинейным траекториям. При необходимости, изменяя профиль паза для движения ползуна и соответственно конфигурацию ползуна, можно обеспечить перемещение последнего по криволинейной траектории. Это расширяет технологические возможности устройства, поскольку движение губок по прямолинейной траектории при переносе изделий во многих случаях оказывается предпочтительным, однако не исключается движение губок и по дугам постоянного радиуса.
Формула (1) определяет правильность построения кинематической цепи многозвенного передаточного механизма, состоящего из 5 подвижных звеньев и 7 кинематических пар, построенного на базе кривошипно-кулисного механизма с качающейся кулисой. Механизм с качающейся кулисой может обеспечивать, в зависимости от параметра λ, размах кулисы на угол, близкий к 180o, что при соответствующей длине кулисы определяет увеличенный ход выходного звена передаточного механизма и выходных звеньев с губками для захвата изделий. Этим открывается возможность для использования устройства при различных значениях длин между позициями "схвата" изделия и его выдачи.
Формула (2) определяет правильность построения кинематической цепи комбинированного механизма, состоящего из многозвенного передаточного механизма и исполнительного механизма с ведущим звеном в виде неподвижного копира. Исполнительный механизм представлен в обращенном движении: при неподвижном копире, принимая выходное звено (ползун) передаточного механизма в качестве ведущего, получаем W=3•n-2p5-p4=3•2-2•2-1=1, где W - число степеней свободы выходного звена исполнительного механизма относительно движущегося ползуна. Если принять в качестве ведущего звена копир, то получим тот же численный результат, в котором значение W=1 - число степеней свободы выходного звена исполнительного механизма относительно выходного звена (ползуна), занимающего фиксированное положение.
Жесткое соединение губок с выходными звеньями исполнительного механизма определяется тем, что губки должны имитировать движение выходных звеньев. Выполнение упомянутого соединения разъемным вызвано тем, что такое соединение обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Выполнением в неподвижном копире фигурных пазов обеспечивается возможность для геометрического замыкания высших кинематических пар и исключается необходимость использования пружин или груза, увеличивающих неравномерность движения звеньев устройства. Применение роликов на выходных звеньях исполнительного механизма уменьшает износ рабочих профилей фигурных пазов копира и таким образом способствует точности функционирования губок устройства.
Дополнительное звено в виде шатуна в составе передаточного механизма обеспечивает преобразование возвратно-поворотного движения кулисы базового механизма в возвратно-поступательное движение выходного звена (ползуна), шарнирно связанного с выходными звеньями исполнительного механизма. Такое преобразование движений лежит в основе расширения технологических возможностей устройства, достигаемого при прямолинейном движении выходных звеньев, несущих губки для захвата изделий.
Выполнение ведущего звена в виде кривошипа является предпочтительным в сравнении с возможным применением, например, ведущего кулачка. Подвижное сопряжение кривошипа с ведомой кулисой при значительном силовом нагружении можно выполнить посредством ползуна (путем использования низших кинематических пар), при малых силовых нагрузках упомянутое сопряжение можно обеспечить, применяя ролик или шип (посредством высшей кинематической пары). Однако при использовании ведущих кулачков возможность варьирования характером кинематических пар исключается, что ограничивает их применение при передаче значительных силовых нагрузок.
Формула (3) дает возможность, не прибегая к графическому построению, по величине относительной длины λ кривошипа определить полный угол β размаха кулисы, с учетом которого, зная расстояние между позициями "схвата" и выдачи изделия, определить необходимую длину кулисы базового механизма.
На чертеже представлено устройство типа "рука" для передачи изделий, кинематическая схема.
Устройство содержит комбинированный механизм 1, выполненный в виде многозвенного передаточного механизма 2, исполнительного механизма 3 с губками 4 для захвата изделий и привода 5.
Механизм 2 включает базовый механизм 6, выходное звено (ползун) 7 и дополнительное звено (шатун) 8. Базовый механизм 6 содержит кривошип 9, кулису 10 и промежуточное звено (ползун) 11 для кинематической связи кривошипа с кулисой. Кулиса 10 шарнирно соединена с шатуном 8, свободный конец последнего шарнирно соединен с ползуном 7.
Исполнительный механизм 3 выполнен в виде неподвижного копира 12 с фигурными пазами 13 и 14 и выходных звеньев 15 и 16 с жестко закрепленными на них губками 4 для захвата изделий. Звенья 15 и 16 шарнирно связаны с выходным звеном 7 передаточного механизма посредством пальца 17, жестко закрепленного на упомянутом выходном звене. На свободных концах звеньев 15 и 16 смонтированы ролики 18 и 19 для взаимодействия с фигурными пазами 13 и 14 копира 12, который жестко закреплен на неподвижном основании.
Форма губок 4 соответствует форме передаваемых изделий. При захвате и переносе изделия обеспечивается сопряжение губок с изделием по большей части периметра последнего.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вал последнего совершает вращательное движение, которое посредством базового механизма 6 и шатуна 8 преобразуется в возвратно-поступательное движение выходного звена 7, состоящее из рабочих и холостых ходов.
При движении звена 7 ролики 18 и 19 выходных звеньев 15 и 16 исполнительного механизма взаимодействуют с фигурными пазами 13 и 14 копира 12, сообщая выходным звеньям поворотные движения и выстои относительно выходного звена 7 передаточного механизма. При этом губки 4 выполняют аналогичные движения и выстои.
Началу рабочего хода устройства соответствует его положение, при котором выходное звено 7 механизма 2 находится в крайнем положении, соответствующем границе интервалов рабочего и холостого ходов, при этом кривошип 9 и кулиса 10 базового механизма расположены относительно друг друга под прямым углом. В этом положении комбинированного механизма 1 губки 4 разжаты и готовы для "схвата" изделия.
В интервале рабочего хода устройства губки 4 занимают сжатое положение, выполняя операцию переноса изделия в позицию выдачи, при этом губки удерживают изделие, переносимое по прямолинейной траектории.
По завершении рабочего хода губки 4 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. В позиции выдачи изделия выходное звено 7 занимает другое крайнее положение, соответственно кривошипы 9 и кулиса 10 занимают положение "под прямым углом". При выполнении холостого хода губки занимают сжатое положение до прихода их в позицию "схвата" изделия.
Губки 4, закрепленные на выходных звеньях 15 и 16 исполнительного механизма 3, могут совершать поворотные движения и выстои заданной продолжительности относительно выходного звена 7 одновременно или последовательно со смещением во времени. Этим обеспечивается возможность выбора закона движения губок предпочтительно для передаваемых изделий.
В интервале кинематического (рабочего) цикла устройства губки 4 совершают сложное движение, состоящее из двух простых движений: возвратно-поворотного с выстоями относительно звена 7 и возвратно-поступательного вместе со звеном 7.
Выполнение выходного звена передаточного механизма в виде ползуна, совершающего поступательные движения и подвижно сопряженного с выходными звеньями исполнительного механизма, несущими губки для захвата изделий, расширяет технологические возможности устройства и способствует снижению энергозатрат на процесс передачи изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2236343C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин и устройств различного целевого назначения. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущими и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привода. Выходное звено передаточного механизма выполнено в виде ползуна, подвижно сопряженного с выходными звеньями исполнительного механизма. Передаточный механизм выполнен в виде многозвенного механизма, построенного на базе механизма с качающейся кулисой. Губки для захвата изделий жестко соединены с выходными звеньями исполнительного механизма, при этом упомянутое соединение выполнено разъемным. Ведущие звенья исполнительного механизма выполнены в виде неподвижного копира, снабженного фигурными пазами. На свободных концах выходных звеньев смонтированы ролики для взаимодействия с упомянутыми пазами. Изобретение позволит снизить энергозатраты на процесс передачи изделий и расширить технологические возможности устройства. 7 з.п. ф-лы, 1 ил.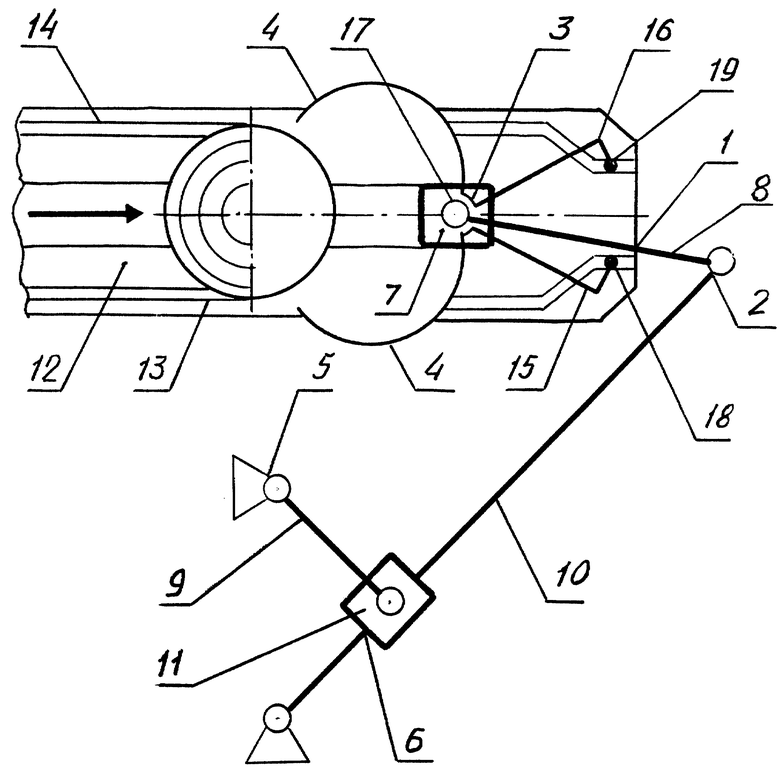
W=3•n-2•p5-p4=3•5-2•7=1,
где W - число степеней свободы выходного звена передаточного механизма, W=1;
n - число подвижных звеньев, n=5;
р5 - число низших кинематических пар, р5=7;
р4 - число высших кинематических пар, р4=0.
W=3•n-2•p5-p4=3•6-2•8-1=1,
где W - число степеней свободы каждого из выходных звеньев исполнительного механизма относительно выходного звена передаточного механизма, W= 1;
n - число подвижных звеньев, n=6;
р5 - число низших кинематических пар, р5=8;
р4 - число высших кинематических пар, р4=1.
β=2arcsinλ,
где β - угол качания кулисы - угол между крайними положениями кулисы;
λ - характерный параметр механизма - относительная длина кривошипа, λ = r/d;
r - длина кривошипа;
d - расстояние между центрами вращения кривошипа и качания кулисы.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

