Изобретение относится к беспилотным летательным аппаратам (БПЛА), используемым в составе подвижного беспилотного авиационного комплекса (БАК) безаэродромного базирования.
Известны беспилотные летательные аппараты, например, Eagle Eye американской фирмы Bell (www janes com) типа V-22 Osprey с поворотными винтами, позволяющими летательному аппарату взлетать по-вертолетному, а затем переходить на самолетный режим полета.
Недостатком такого типа летательных аппаратов является ограничение дальности, высоты и времени его работы вследствие использования для подъема и полета летательного аппарата ограниченных внутренних источников энергии, например топлива на борту.
Известен беспилотный авиационный комплекс фирмы «Израел Аэроспэйс Индастриз ЛТД» (WO 2007/141795 A1, B64C 27/20, 13.12.2007 - наиболее близкий аналог), включающий наземную станцию, подъемную платформу, несущую полезную нагрузку и движитель из четырех вентиляторов с электроприводом, обеспечивающих вертикальную подъемную силу и позволяющих поддерживать заданную высоту платформы на режиме висения без аэродинамических несущих поверхностей, таких как крылья. Комплекс включает также привязь, оперативно связывающую наземную станцию с платформой, которая обеспечивает электрическую связь между платформой и наземной станцией.
Использование движителями внешнего источника энергии, установленного на мобильной платформе, а также невозможность совершать самостоятельное перемещение вне привязки к наземной станции - ограничивают функциональные возможности такого беспилотного авиационного комплекса. В частности, высота подъема платформы ограничена длиной привязи, которая продиктована, в том числе, массой входящего в нее кабеля.
Задачей заявляемого изобретения является повышение эффективности действия беспилотного летательного аппарата, расширение контролируемой площади, дальности его действия и длительности его функционирования за счет использования внешнего источника энергии (установленного на мобильной платформе) для накопления кинетической энергии и обеспечения «прыжкового взлета» беспилотного летательного аппарата на заданную высоту и его перехода на самолетный режим работы.
Поставленная задача решена благодаря тому, что в беспилотном авиационном комплексе, содержащем беспилотный летательный аппарат, включающий движители и корпус для полезной нагрузки, и стартовую наземную станцию, содержащую мобильную платформу, например колесную, и установленные на ней энергетическую установку и блок управления полетом беспилотного летательного аппарата, согласно изобретению беспилотный летательный аппарат выполнен в виде двухконсольного крыла, на консолях которого установлены движители, причем консоли выполнены с возможностью их поворота на 180° относительно продольной оси крыла вокруг корпуса для полезной нагрузки, например шарообразного, а на платформе стартовой наземной станции установлен вертикально трансмиссионный вал, связанный с редуктором, и стартовое устройство, которое установлено с помощью трех опор и содержит средства для передачи вращения от трансмиссионного вала к беспилотному летательному аппарату, а также средства для его фиксации и расфиксации относительно стартового устройства.
В частности, стартовое устройство может быть снабжено двумя жестко связанными с трансмиссионным валом кронштейнами с захватами, взаимодействующими с ответными силовыми узлами беспилотного летательного аппарата и выполненными с возможностью их фиксации и расфиксации при заданной скорости вращения трансмиссионного вала.
Опоры стартового устройства выполнены телескопическими с независимой регулировкой их длины от блока управления для предполетной коррекции пространственной ориентации беспилотного летательного аппарата.
Беспилотный авиационный комплекс снабжен также системой предполетной автоматической статической балансировки беспилотного летательного аппарата.
Использование стартового устройства для подъема беспилотного летательного аппарата путем «прыжкового взлета» (термин, используемый, например, применительно к автожиру) за счет внешнего источника питания обеспечивает ему запас кинетической энергии, которая используется для его подъема на заданную высоту и для перехода на самолетный режим работы. Выполнение беспилотного летательного аппарата в виде крыла, консоли которого вместе с движителями на них имеют возможность поворота на 180 градусов относительно продольной оси крыла, обеспечивает беспилотному летательному аппарату различные режимы работы - от взлетного режима, обеспечивающего его раскрутку с помощью стартовой наземной станции, до самолетного режима, обеспечивающего автономный длительный полет. Движители могут быть выполнены с турбореактивными, с турбовинтовыми, а также с поршневыми или электрическими двигателями.
Вертикальный трансмиссионный вал, передающий вращение с кронштейнов стартового устройства беспилотному летательному аппарату при зафиксированных захватах, позволяет раскрутить его до заданной скорости вращения трансмиссионного вала, обеспечивая ему запас кинетической энергии. При расфиксации захватов кронштейнов, например, при заданной скорости вращения трансмиссионного вала, беспилотный летательный аппарат совершает «прыжковый взлет» до необходимой расчетной высоты. При раскрутке беспилотного летательного аппарата на трансмиссионном валу стартовой наземной станции, консоли его крыла с движителями находятся в положении, обеспечивающими его вращение. Возможность автоматической предполетной коррекции стартовой пространственной ориентации беспилотного летательного аппарата, а также возможность предполетной автоматической статической балансировки его (дистанционно со стартовой наземной станции или по заданной программе) направлены на обеспечение точности и безопасности его взлета.
Блок управления полетом, размещенный на стартовой наземной станции, обеспечивает дистанционное управление работой беспилотного летательного аппарата, в частности подает сигналы для изменения взаимного положения консолей с движителями как для работы па самолетном режиме, так и в противоположном положении - для работы в стартовом режиме. Беспилотный авиационный комплекс снабжен системой предполетной автоматической статической балансировки беспилотного летательного аппарата, выполненной, например, с помощью известной системы перемещаемых грузов.
Изобретение поясняется чертежами, на которых изображены:
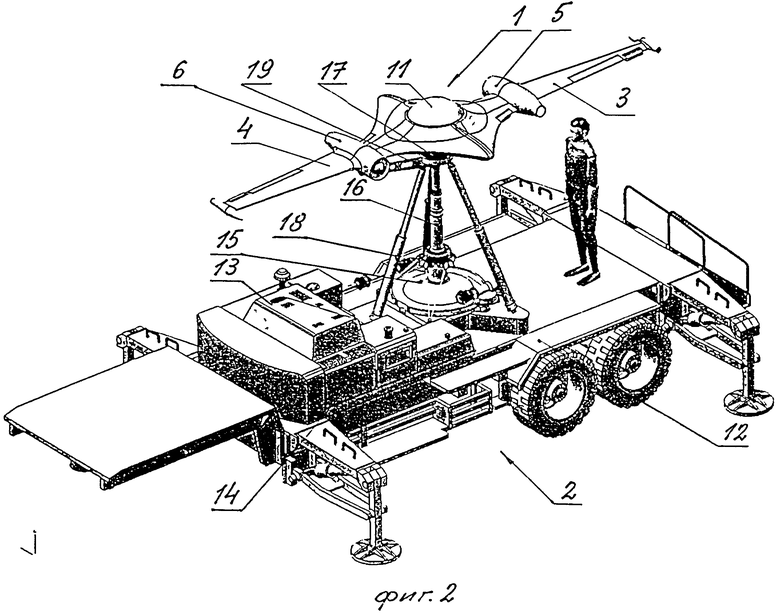
Фиг.1 - беспилотный авиационный комплекс с беспилотным летательным аппаратом (с турбовинтовыми двигателями) при стартовом положении консолей крыла;
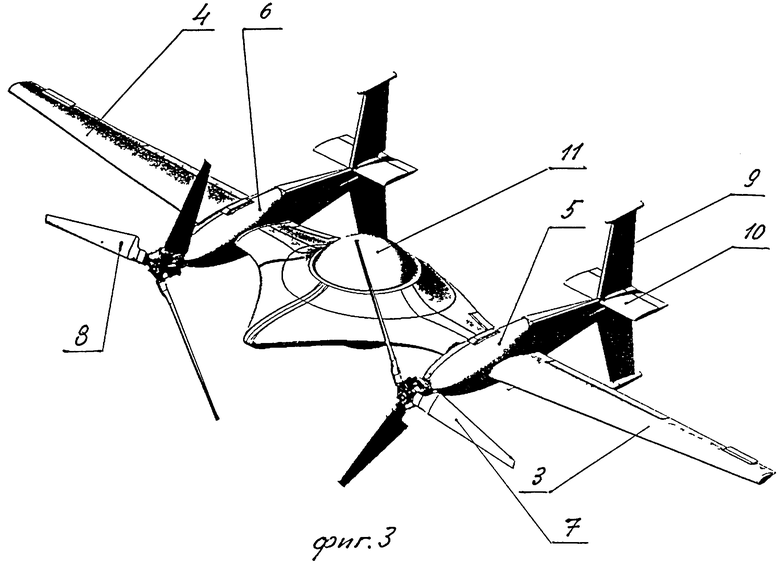
Фиг.2 - беспилотный авиационный комплекс с беспилотным летательным аппаратом (с турбореактивными двигателями) при стартовом положении консолей крыла;
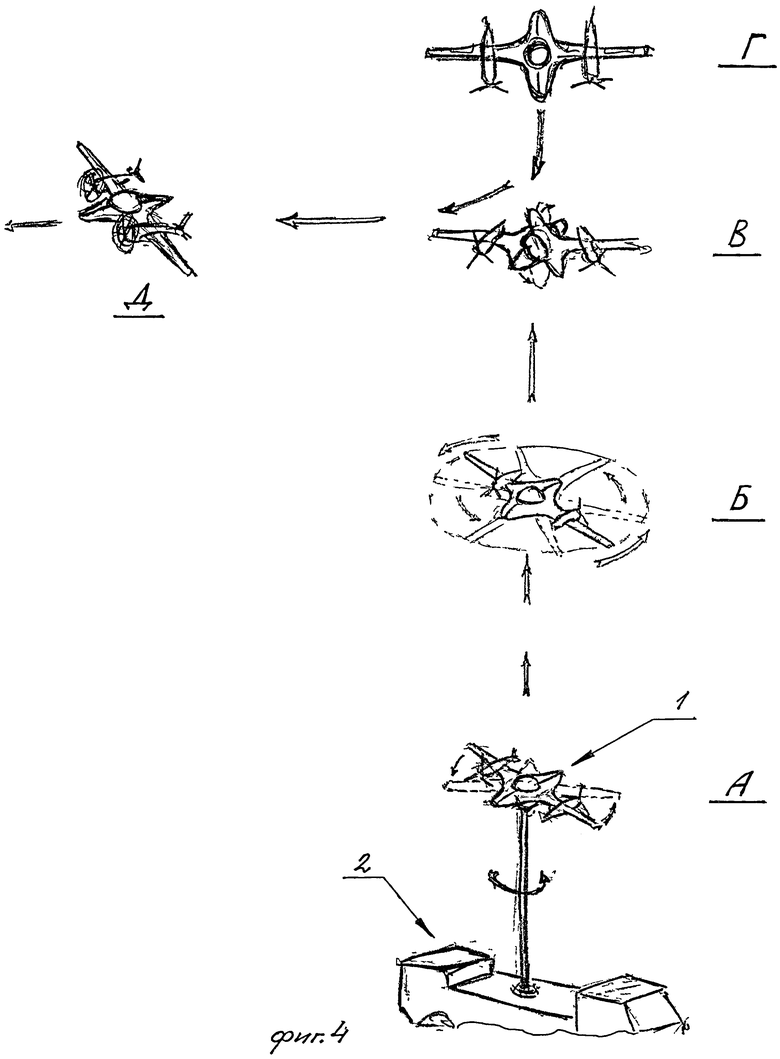
Фиг.3 - беспилотный летательный аппарат при положении консолей крыла, соответствующем самолетному режиму полета;
Фиг.4 - схематичное изображение различных этапов вывода беспилотного летательного аппарата на самолетный режим полета,
Беспилотный авиационный комплекс состоит из собственно беспилотного летательного аппарата 1 и стартовой наземной станции 2 (фиг.1), которая служит для обеспечения «прыжкового взлета» беспилотного летательного аппарата и дистанционного управления его полетом.
Беспилотный летательный аппарат 1 выполнен в виде двухконсольного крыла, на консолях 3 и 4 которого соответственно установлены движители 5 и 6. Движители 5 и 6 могут быть выполнены, например, в виде турбовальных двигателей с винтами 7 и 8 с изменяемым углом установки лопастей. Кроме этого, они могут иметь стабилизирующие поверхности 9 и рули и 10 для управления полетом беспилотного летательного аппарата 1 (фиг.1 и 2).
Беспилотный летательный аппарат 1 имеет корпус 11 полезной нагрузки, выполненный, например, шарообразной формы для уменьшения лобового сопротивления при запуске. Корпус 11 полезной нагрузки предназначен для размещения в нем автономных бортовых источников питания, топлива для двигателей, а также различного оборудования для приема, управления и передачи на землю различной информации.
Консоли 3 и 4 выполнены профилированными по всей длине для создания подъемной силы при горизонтальном полете БПЛА, а также имеют возможность поворота на 180 градусов относительно продольной оси крыла.
Стартовая наземная станция 2 выполнена в виде платформы 12, установленной на транспортном средстве, например, на автомобильном, железнодорожном или водном. На платформе 12 установлены блок 13 управления полетом беспилотного летательного аппарата, энергетический узел 14, а также редуктор 15 с вертикальным трансмиссионным валом 16 и стартовое устройство 17, которое установлено с помощью трех телескопических опор 18.
Стартовое устройство 17 снабжено несколькими жестко связанными с трансмиссионным валом 16 кронштейнами 19 с захватами на концах (не показаны), взаимодействующими с ответными силовыми узлами беспилотного летательного аппарата 1 для передачи ему вращения от трансмиссионного вала 16. Захваты выполнены быстродействующими, с возможностью их фиксации и мгновенной расфиксации относительно стартового устройства 17 при заданной скорости вращения трансмиссионного вала 15 и связаны с блоком управления 13.
Телескопические опоры 18 выполнены с независимой регулировкой их длины от блока управления 13 для предполетной коррекции пространственной ориентации беспилотного летательного аппарата 1.
Беспилотный авиационный комплекс снабжен системой предполетной автоматической статической балансировки беспилотного летательного аппарата 1, которая может быть выполнена, например, за счет внутренней системы изменения его центровки, например, путем перекачки топлива или изменением положения полезной нагрузки в корпусе 11.
Беспилотный авиационный комплекс осуществляет запуск беспилотного летательного аппарата (БПЛА) 1 следующим образом. Стартовая наземная станция 2 прибывает на место старта и разворачивает свою платформу 12. БПЛА устанавливают на стартовое устройство 17, связанное с трансмиссионным валом 16, и соединяют силовые узлы крепления БПЛА с захватами на кронштейнов 19 стартового устройства 17. Затем приводят БПЛА 1 в стартовое положение (позиция А на фиг.4), при котором консоли 3 и 4 крыла с движителями 5, 6 повернуты относительно друг друга на 180 градусов относительно продольной оси крыла. После этого с помощью блока управления автоматически проводят коррекцию стартового пространственного положения БПЛА путем независимой регулировки длины телескопических опор 18 для осуществления точного и безопасного старта. Кроме этого, проводят предполетную автоматическую статическую балансировку БПЛА.
Затем осуществляют раскрутку БПЛА с помощью трансмиссионного вала 16 редуктора 15 наземного энергетического узла 14 стартовой наземной станции 2. При достижении заданных расчетных оборотов трансмиссионного вала 16 блок 13 управления полетом БПЛА подает команду на расфиксацию узлов захвата кронштейнов 19. Кинетическая энергия, накопленная БПЛА, преобразуется в подъемную силу и позволяет ему осуществить «прыжковый взлет» на расчетную высоту (положения А-Г фиг.4). Блок 13 управления полетом в момент отрыва (положения А и Б фиг.4) изменяет шаг консолей 3, 4 крыла, придавая крылу свойства несущего винта.
В процессе исчерпания кинетической энергии БПЛА блок управления 13 осуществляет переходный режим с «взаимным» разворотом консолей 3, 4 крыла до их положения, соответствующего полету БПЛА «по самолетному» (положения В-Г фиг.4).
При начале падения БПЛА (из положения Г фиг.4) включаются движители 5, 6, и БПЛА переходит в самолетный режим полета (положение Д фиг.4) за счет бортовых источников энергии. Автономный полет БПЛА выполняет по программе блока управления полетом 13 на самолетном режиме.
Выполнение запуска с использованием эффекта «прыжкового взлета» позволяет существенно экономить бортовые источники энергии, что увеличивает длительность работы БПЛА, дальность и эффективность его действия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| Авиационный комплекс с БЛА | 2019 |
|
RU2735483C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| СПОСОБ УПРАВЛЕНИЯ МАРШРУТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2751367C1 |
| Устройство защиты от беспилотных летательных аппаратов | 2024 |
|
RU2831455C1 |
Изобретение относится к области авиационной техники. Беспилотный авиационный комплекс (БАК) безаэродромного базирования содержит беспилотный летательный аппарат (БПЛА) и стартовую наземную станцию, содержащую мобильную платформу и установленные на ней энергетическую установку и блок управления полетом БПЛА. БПЛА выполнен в виде двухконсольного крыла, на поворотных консолях которого установлены движители. Консоли выполнены с возможностью их поворота на 180° относительно продольной оси крыла вокруг корпуса для полезной нагрузки. На платформе стартовой наземной станции установлен вертикально трансмиссионный вал, связанный с редуктором, и стартовое устройство, установленное с помощью трех опор. Стартовое устройство содержит средства для передачи вращения от трансмиссионного вала к БПЛА, а также средства для его фиксации и расфиксации при заданной скорости вращения трансмиссионного вала. Опоры стартового устройства выполнены телескопическими с независимой регулировкой их длины от блока управления для предполетной коррекции пространственной ориентации беспилотного летательного аппарата. БАК снабжен системой предполетной автоматической статической балансировки беспилотного летательного аппарата. Достигается увеличение дальности и длительности действия, а также эффективности беспилотного летательного аппарата. 3 з.п. ф-лы, 4 ил.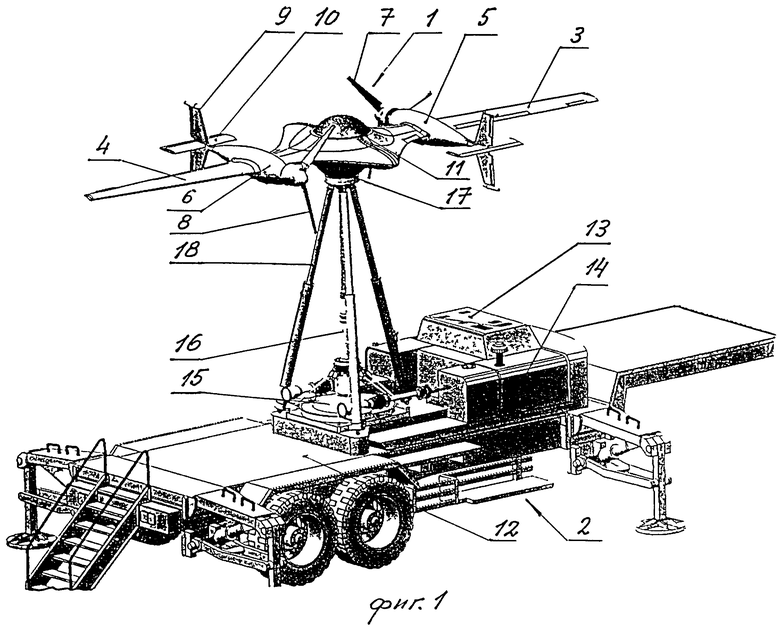
1. Беспилотный авиационный комплекс, содержащий беспилотный летательный аппарат, включающий движители и корпус для полезной нагрузки, и стартовую наземную станцию, содержащую: мобильную платформу, например колесную, и установленные на ней энергетическую установку и блок управления полетом беспилотного летательного аппарата, отличающийся тем, что беспилотный летательный аппарат выполнен в виде двухконсольного крыла, на консолях которого установлены движители, причем консоли выполнены с возможностью их поворота на 180° относительно продольной оси крыла вокруг корпуса для полезной нагрузки, например шарообразного, а на платформе стартовой наземной станции установлен вертикально трансмиссионный вал, связанный с редуктором, и стартовое устройство, которое установлено с помощью трех опор и содержит средства для передачи вращения от трансмиссионного вала к беспилотному летательному аппарату, а также средства для его фиксации и расфиксации относительно стартового устройства.
2. Беспилотный авиационный комплекс по п.1, отличающийся тем, что стартовое устройство снабжено жестко связанными с трансмиссионным валом кронштейнами с захватами, взаимодействующими с ответными силовыми узлами беспилотного летательного аппарата и выполненными с возможностью их фиксации и расфиксации при заданной скорости вращения трансмиссионного вала.
3. Беспилотный авиационный комплекс по п.1, отличающийся тем, что опоры стартового устройства выполнены телескопическими с независимой регулировкой их длины от блока управления для предполетной коррекции пространственной ориентации беспилотного летательного аппарата.
4. Беспилотный авиационный комплекс по п.1, отличающийся тем, что он снабжен системой предполетной автоматической статической балансировки беспилотного летательного аппарата.
| WO 2007141795 A1, 13.12.2007 | |||
| Устройство для определения скорости течения газов или жидкостей | 1931 |
|
SU29282A1 |
| RU 2004108887 A, 20.10.2005 | |||
| KR 20070112819 A, 27.11.2007. | |||

